
Elektriajamite juhtimine
Elektriajamite juhtimispõhimõtted
Nüüdisaegsete elektriajamite juhtimispõhimõtted võib liigitada kolme suurde rühma.
1. Klassikalised juhtimismeetodid põhinevad tagasisidel (feedback) ja vea järgi juhtimisel (error driven control). Neid on eriti sobiv rakendada lihtsate ühe sisendi ja ühe väljundiga süsteemide korral. Enamikul juhtudel on need süsteemid lineariseeritavad tööpunkti ümber, s.t. neid saab kirjeldada lineaarsete diferentsiaalvôrranditega. Nende korral on vôimalik hõlpsasti rakendada Laplace'i teisendust ning kasutada süsteemi analüüsiks ja sünteesiks sageduslikke meetodeid. Süsteemide juhtimiseks kasutatakse klassikalisi PID- jt. regulaatoreid.
2. Moodsad juhtimismeetodid põhinevad süsteemi olekuruumil (state space) ja olekumuutujatel (state variables). Neid meetodeid rakendatakse, kui on tegemist keerukate mitme sisendi ja väljundiga mitmelisidusate mittelineaarsete süsteemidega. Olekumuutujate määramiseks kasutatakse juhtimisobjekti mudeleid (model based control). Need võimaldavad süsteemide optimaalset ning adaptiivjuhtimist. Olekumuutujatel põhinevate süsteemide analüüsiks ja sünteesiks kasutatakse peamiselt ajafunktsioone, s. o. siirdeprotsessidel põhinevaid meetodeid. See asjaolu on seletatav tõsiasjaga, et keerukaid süsteeme juhitakse põhiliselt digitaalarvutitega, mis töötavad nii-öelda ajaskaalal. Olekumuutujatel põhinevat automaatjuhtimisteooriat on hakatud nimetama ka moodsaks juhtimisteooriaks.
3. Intellektuaalsed juhtimismeetodid põhinevad hägusloogikal ja ekspert-hinnangutel. Neid meetodeid rakendatakse iseseisvalt vôi lisaabinôuna juhul, kui on tegemist juhtimisobjekti vôi tema töökeskkonna olulise määramatusega. Süsteemi muutujatele antakse sel juhul kvantitatiivsete väärtuste asemel kvalitatiivsed hinnangud (näiteks väga suur, suur, keskmine, väike, väga väike vms.) ning tema sisendid ja väljundid seotakse KUI-SIIS (IF-THEN) lausetega. Süsteemi analüüsiks ja sünteesiks kasutatakse tõenäosuslikke meetodeid, juhtimiseks aga hägusloogika kontrollereid. Juhtimisseadme loomine taandub sel juhul peamiselt eksperthinnangutel põhineva otsustamisloogika sünteesile. Nüüdisaegsete ajamite juhtimisel rakendatakse kõiki eespool loetletud juhtimismeetodeid.
Elektriajami juhtimise all mõistetakse tema käivitamist, kiiruse reguleerimist, reversseerimist, elektrilist pidurdamist, aga samuti mingi elektriajami tööd ise-loomustava suuruse (kiirus, moment, võimsus vm) hoidmist konstantsena eesmärgiga kindlustada mingi tehnoloogilise protsessi ettenähtud kulgemine.
Inimese vahetu osavõttelektriajami juhtimisprotsessis võib olla erinev ja vastavalt sellele võib liigitada elektriajameid alljärgnevalt:
- mitteautomaatne (käsijuhtimisega) elektriajam – juhtimine toimub mitmesuguste käsijuhtimisaparaatide abil;
- automatiseeritud elektriajam – juhtimistoimingud teevad mitme-sugused elektromehaanilised või muud elektriaparaadid (inimene käivitab elektriajami);
- automaatelektriajam – kõik juhtimistoimingud teevad automaatjuhtimis-aparaadid (inimene jälgib elektriajami töö).
Juhtimiseks kasutatavatesignaalide arvu järgi liigitatakse tema juhtimis- süsteemid järgnevalt:
- avatud juhtimissüsteemid – juhtimiseks kasutatakse ainult üht juhtimissignaali, mistõttu juhtimistoime ei sõltu juhtimistulemusest – puudub igasugune kontroll juhitava suuruse (kiirus, moment, võimsus vm) üle;
- suletud juhtimissüsteemid – juhtimissignaali moodustamiseks kasutatakse vähemalt kaht signaali: etteandesignaali ja vähemalt üht juhitava suuruse väärtusest sõltuvat tagasisidesignaali;
- kombineeritud juhtimissüsteemid – kombinatsioon kahest eelnevast: juhtimissüsteem töötab juhitava suuruse mingis muutumisvahemikus kui suletud juhtimissüsteem, kui juhitav suurus väljub etteantud vahemikust, hakkab juhtimissüsteem tööle kui avatud süsteem või vastupidi.
Juhtimissüsteeme võib liigitada ka juhtimiseks kasutatavate signaalide iseloomu järgi. Selle tunnuse järgi tuntakse järgmisi juhtimissüsteeme:
- pidevatoimelised ehk analoogjuhtimissüsteemid – signaalid on võrdelised või muus funktsionaalses seoses juhitava suuruse väärtusega;
- diskreetsed juhtimissüsteemid – juhtimistoime või juhitava suuruse väärtus teisendatakse katkendtoimelisteks signaalideks.
Diskreetsed juhtimissüsteemid liigitatakse omakorda impulsstoimelisteks, arv-ja releetoimelisteks süsteemideks:
- impulsstoimelistes juhtimissüsteemides toimub juhtimine ühe-polaarsete juhtimisimpulssidega, kusjuures mingi juhtimisimpulssi ise-loomustav parameeter (impulsi amplituud, laius, impulsside sagedus või impulsi faasinihe mingi tugiimpulsi suhtes) kannab vajalikku informatsiooni;
- arvjuhtimissüsteemides muudetakse juhtimistoime või juhitava suuruse väärtus mingi arvkoodi arvväärtuseks;
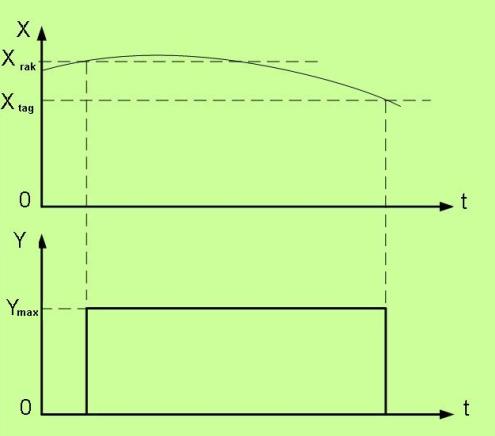
- releetoimelistes süsteemides tekib mingi kindla väärtusega juhtimis-toime Y hüppeliselt, kui juhitav suurus X saavutab kindla rakendus-väärtuse ja muutub hüppeliselt nulliks või väheneb mingi kindla minimaalväärtuseni, kui juhitav suurus väheneb tagastusväärtuseni (joonis 2);
- järgivsüsteemid – juhtimistoime järgib mingi sisendsignaali muutumist;
- programmjuhtimissüsteemid – juhtimistoime muutub vastavalt etteantud programmile.
Suletud juhtimissüsteeme liigitatakse sõltuvalt ajami koormuse mõjust reguleeritavale suurusele alljärgnevalt:
- staatilised juhtimissüsteemid – koormuse muutumine põhjustab reguleeritava suuruse muutumise;
- astaatilised juhtimissüsteemid – koormuse muutumine ei mõjuta reguleeritavat suurust;
- segasüsteemid – kombinatsioon mõlemast ülaltoodud süsteemist.
Elektriajamite juhtimissüsteemid ja–skeemid täidavad mitmesuguseid ülesandeid, mida võib liigitada põhiülesanneteks ja lisaülesanneteks.
Juhtimissüsteemide ja –skeemide poolt täidetavad põhiülesanded on:
- elektriajami käivitamine, pidurdamine ja reversseerimine;
- mingi füüsikalise suuruse (kiirus, moment, võimsus vm) etteantud väärtuse hoidmine konstantsena (stabiliseerimine);
- eelnevalt teadmata moel muutuva sisendsignaali järgimine (järgivelektriajam);
- etteantud programmi täitmine (programmjuhtimisega elektriajam);
- elektriajami optimaalse töörezhiimi valik.
Lisaülesanneteks on:
- elektrimootori ja elektriajami teiste osade kaitse avariiliste ja ebanormaalsete talitluste eest;
- avariiliste ja ebanormaalsete talitluste tekkimise vältimine inimese eksimuste tulemusena (blokeeringud);
- automaatjuhtimise kindla toimingute järjekorra tagamine;
- mehhanismide liikumisulatuse piiramine lõppasendites;
- tehnoloogilise protsessi kulgemist kajastav signalisatsioon;
- riketest ja muudest ebanormaalsustest teavitav signalisatsioon.
Elektriajamite käivitamine, elektriline pidurdamine ja reversseerimine on alati seotud vajadusega teostada mitmesuguseid ümberlülitusi nii elektriajami jõu- kui juhtimis-ahelates. Neid ümberlülitusi saab automatiseerida, kasutades mitmesuguseid elektri-ajamite juhtimispõhimõtteid.
Kõik elektrimootori dünaamilised talitlused nagu näiteks tema käivitamine, pidurdamine, reversseerimine jt on seotud tema töömähiste voolu, rootori- või ankru-mähises indutseeritud emj ja loomulikult ka rootori pöörlemiskiiruse muutumisega.
Arvestades ülaltoodud saame terve rea elektriajami käivitamise juhtimispõhimõtteid:
- juhtimine sõltuvalt voolust;
- juhtimine sõltuvalt emj-st;
- juhtimine sõltuvalt kiirusest;
- juhtimine sõltuvalt ajast;
- juhtimine sõltuvalt sagedusest – rajaneb sellel, et asünkroonmootori rootori- mähises indutseeritud emj sagedus sõltub libistusest ja muutub rootori kiiruse muutumisel.
- Samamoodi saab kasutada elektrimootori voolu, emj ja kiiruse muutust elektriajami elektrilise pidurduse juhtimiseks.
Elektriajami käivituse ja pidurdamise juhtimispõhimõtteid realiseeritakse vastavate elektriskeemide tüüpsõlmede abil.
Elektriajamite juhtimisel on vajalik meeles pidada et elektriajami ülesandeks on mingi tehnoloogilise protsessi normaalse kulgemise kindlustamine ja seega tuleb sageli juhtida tema tööd sõltuvalt tehnoloogilist protsessi iseloomustavatest suurustest ( võimsus, moment, temperatuur, rõhk, nivoost, sooritatud operatsioonide arvust jne.)
Dünaamilised süsteemid
Masinate või nende tööorganite liikumine on füüsikaliselt kirjeldatav masside liikumisena gravitatsiooniväljas. Niisugust liikumist kirjeldatakse diferentsiaalvõrranditega. Koondatud massiga keha e. masspunkti (tinglikult võib masspunktiks lugeda ka jäiga keha) liikumist gravitatsiooniväljas kirjeldavad teist järku diferentsiaalvõrrandid. Liikuv keha koos temale mõjuvate jõududega on automaatjuhtimise seisukohalt vaadeldav dünaamilise süsteemina. Sõltuvalt kehale mõjuvate jõudude iseloomust võivad võrrandid olla lineaarsed või mittelineaarsed, konstantsete või ajas muutuvate kordajatega. Kõige lihtsamini on uuritavad dünaamilised süsteemid, mida kirjeldavad lineaarsed, konstantsete kordajatega võrrandid.
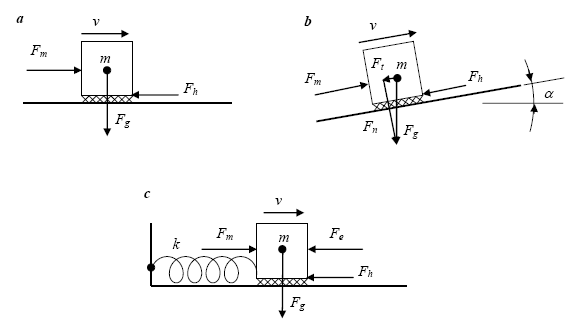
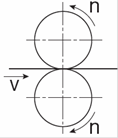
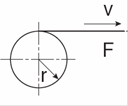
Teist järku dünaamilised süsteemid. Joonisel 1 on näidatud jäiga keha erinevad dünaamilised süsteemid. Liikuvale kehale massiga m toimivad välised liikumist tekitavad (Fe motoorsed jõud Fm) kiirendusega võrdelised inertsijõud, kiirusest sõltuvad takistusjõud (nt hõõrdejõud Fh) ning asendist sõltuvad raskus- või elastsusjõud (Fg, Fe).
Allikas: Lehtla, T. Elektriajamid. Tallinna Tehnikaülikool, Elektriajamite ja jõuelektroonika instituut –Tallinn, 2007. 190 lk.
Konstantse massi puhul kirjeldab jõudude tasakaalu diferentsiaalvõrrand, mille lahendiks on aja funktsioon x(t), mis määrab masspunkti liikumise iseloomu. Diferentsiaalvõrrandi lahend sõltub muutujate (nt asendi ja kiiruse) algväärtustest ehk dünaamilise süsteemi algtingimustest.
Lihtsaimal juhul (joonis 1, a) toimib massile m motoorne jõud Fm, raskusjõud Fg=mg (g on raskuskiirendus) ja liikumist takistav hõõrdejõud Fh. Kuna raskusjõu suund on kiirusvektoriga risti, siis otsest mõju liikumisele raskusjõud ei avalda. Raskusjõu mõju avaldub hõõrdejõu kaudu.
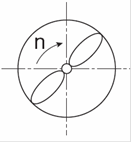
Kaldpinnal liikumisel (joonis 1, b) saab raskusjõu vektori lahutada pinna normaali ja puutuja suunalisteks komponentideks (Fn, Ft).
Sageli mõjub kehale asendist sõltuv jõud. Selleks võib olla nt. vedru elastsusjõud, raskusjõud või mõni muu jõud (joonis 1, c). Vedru elastsust (jäikust) iseloomustab tegur k.
Lihtsamate elektriajamite puhul on vaja samuti kirjeldada jäikasid ühemassilisi süsteeme ning selleks sobivad teist järku lineaarsed diferentsiaalvõrrandid, mis kirjeldavad ka paljusid muid mehaanilisi ja elektrilisi süsteeme.
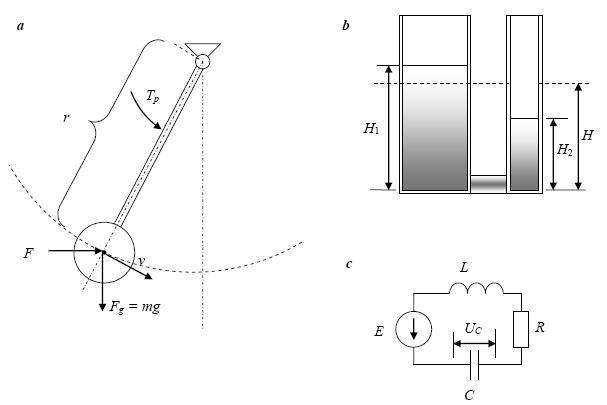
Füüsikaliselt väga erinevaid protsesse saab sageli kirjeldada sarnaste või ühesuguste diferentsiaalvõrranditega ehk füüsikaliselt erinevatele protsessidele võivad vastata ühesugused matemaatilised mudelid. Näiteks energiamuundusprotsess pendlis, vedelikuanumas ja elektriahelas (joonis 6.4).
Allikas: Lehtla, T. Elektriajamid. Tallinna Tehnikaülikool, Elektriajamite ja jõuelektroonika instituut –Tallinn, 2007. 190 lk.
Pendel muundab gravitatsioonivälja potentsiaalset energiat liikumise kineetiliseks energiaks ja vastupidi. Reaalse pendli puhul hajub osa energiat ümbritsevas keskkonnas soojusena. Pendli saab tasakaalust välja viia välise jõu toimel. Tasakaalust välja viidud pendel hakkab omasagedusega võnkuma. Konstantse välise jõu toimel liigub pendel uude tasakaaluasendi poole, kusjuures peatumine uues tasakaaluasendis toimub samuti pärast võnkeprotsessi sumbumist. Kui väline jõud on perioodiliselt võnkuva iseloomuga hakkab see mõjutama pendli omavõnkumist ning liikumise kiirendust, kiirust ja asendit. Kui välisjõu muutumise periood langeb kokku omavõnkumise perioodiga tekib resonants ning pendli võnkumise amplituud kasvab (võrdle kiigele hoo andmisega).
Ühendatud vedelikuanumates toimub pendli liikumisele sarnane protsess. Tasakaalust välja viidud vedelikusammaste algne nivoo on vastavalt H ja H12. Anumate ühenduskanalis oleva ventiili avamisel vedelikunivood võrdsustuvad tasemel H. Protsessi kirjeldatakse teist järku diferentsiaalvõrrandiga. Laminaarse voolamise korral on vedeliku liikumist takistav hõõrdejõud võrdeline vedeliku liikumise kiirusega, turbulentse voolamise korral aga ligikaudu võrdeline vedeliku liikumiskiiruse ruuduga. Kui hõõrdejõud on suur, ühtlustuvad anumate vedelikunivood aperioodiliselt. Väikese hõõrdejõu (nt. ühenduskanali suure ristlõike) puhul toimub nivoode ühtlustumine võnkeprotsessi tulemusena.
Elektriahelas muundatakse induktiivsusesse salvestatud magnetvälja energiat kondensaatori elektrivälja energiaks ja vastupidi. Osa energiat eraldub juhtmetes (takistuses) ning hajub ümbritsevas keskkonnas soojusena. Elektriahela kondensaatori pinge muutumist kirjeldab teist järku lineaarne diferentsiaalvõrrand.
Juhtimise kvaliteet
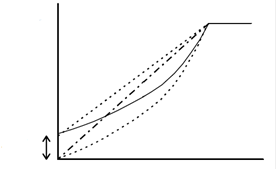
Siirdeprotsesside kvaliteet. Automaatjuhtimise puhul on väga oluline saavutada süsteem soovitud dünaamilised omadused, mida iseloomustab siirdeprotsesside iseloom. Süsteemi siirdeprotsessi hindamiseks on kasutusele võetud rida kvaliteedikriteeriume (joonis 6.5):
- staatiline viga (steady-state error) ε;
- esifrondi kestus (rise time) tr;
- siirdeprotsessi kestus (settling time) ts;
- maksimaalne ülereguleerimine (peak overshoot) ja sellele vastav aeg (time-to-peak overshoot) tp;
- võnkuvus ehk poollainete arv võnkuva siirdeprotsessi keste.
Joonisel toimub siire tasakaaluolekust (püsiolekust) 1 tasakaaluolekusse 2. Tekkiv siirdeprotsess on võnkeline ning selle kestus on ts.
Staatiline viga (steady-state error) ε iseloomustab süsteemi täpsust ja on siirdeprotsessi väljakujunenud püsioleku ning juhttoimega määratud püsiolekute vahe. Süsteeme, mille staatiline viga on võrdne nulliga nimetatakse astaatilisteks süsteemideks.
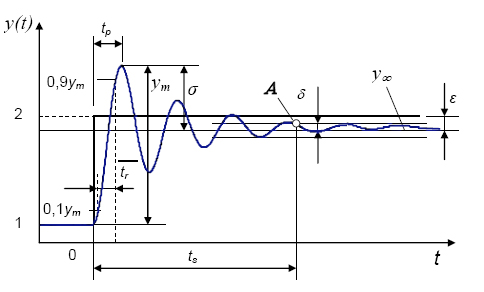
Esifrondi kestuseks (rise time) tr loetakse tavaliselt ajavahemikku, mis kulub hüppekaja muutumiseks vahemikus (0,1...0,9) ym. Kasutatakse ka muid viimasega sarnaseid määratlusi.
Siirdeprotsessi kestus (settling time) ts on ajavahemik, mille kestel (y(t)−y∞)/y∞⋅100% > δ, kus y(t) on hüppekaja hetkväärtus (kõrvalekalle esialgse tasakaaluoleku suhtes); y∞ - hüppekaja püsiväärtus (uue ja esialgses püsioleku erinevus); δ - etteantud hälbe suurus, mille abil määratakse siirdeprotsessi kestus. Joonisel 1 on näidatud punkt A, kust edasi siirdeprotsess kulgeb etteantud vahemikus ±δ. Enamasti võetakse δ = 5 % hüppekaja püsiväärtusest. Aperioodilise protsessi korral on siirdeprotsessi kestus sel juhul ts=3τ, kus τ on protsessi ajakonstant.
Siirdeprotsessi esifrondi- ja kogukestus iseloomustavad süsteemi toimekiirust. Viimane on suure tähtsusega neis süsteemides, mille töös etendavad suurt osa dünaamilised protsessid, nt. käivitus- ja pidurdusprotsessid. Niisugusteks süsteemideks on näiteks pikihöövelpingid, kus siirdeprotsess moodustab olulise osa kogu töötsüklist. Süsteemide toimekiiruse suurendamine ja ühtlasi siirdeprotsessi kestuse lühendamine aitab oluliselt suurendada masinate tootlikkust.
Maksimaalne ülereguleerimine (peak overshoot) σ on määratav seosega σ = (ymaks−y∞)/y∞⋅100% kus ymaks on vaadeldava suuruse maksimaalne kõrvalekalle.
Lubatav ülereguleerimine määratakse konkreetseid tingimusi arvestades. Mitmete raamatute andmeil on ülereguleerimine erinevates süsteemides vahemikus σ = 4,3...53 %. Näiteks, maksimaalne ülereguleerimine σ = 4,3 % on kehtestatud mooduloptimumile häälestatud alluvkontuuridega süsteemi esimese kontuuri kohta, σ = 53 % vastab aga süsteemi kontuuri sümmeetrilisele optimumile.
Võnkuvus ehk poollainete arv siirdeprotsessi kestel (ajavahemiku ts kestel) näitab, mitu korda protsessi kestel hüppekaja hetkväärtus ületab etteantud püsiväärtuse. Joonisel 1 näidatud hüppekaja puhul on poollainete arv 7. Nagu lubatav ülereguleerimine, määratakse ka soovitav poollainete arv siirdeprotsessi kestel, konkreetseid juhtimisnõudeid arvestades.
Siirdeprotsessi kvaliteeti saab hinnata kas eksperimentaalselt määratud või arvutatud hüppekaja järgi, kusjuures hüppekaja arvutamiseks kasutatakse nii analüütilisi, numbrilisi kui ka kaudseid lihtsustatud meetodeid. Ajamite juhtimise täpsus ja siirdeprotsesside kvaliteet eriti olulised tööpinkide puhul.
Tagasiside
Tagasiside (feedback) on mälu olemasoluks ja tegevuse juhtimiseks vajalik põhimõte, millele tugineb kogu elusloodus. Inimene on seda põhimõtet rakendanud tehnilistes süsteemides juba tuhandeid aastaid. Tänapäeval pole tagasisideta mõeldav ükski arvuti ega automaatikasüsteem.
Mõistet tagasiside on kerge illustreerida lihtsa näitena meremehest, kes juhib laeva rooliratta abil (joonis 6.6). Tüürimees hoiab laeva kurssi vastavalt antud korraldustele. See juhtimismeetod, tähistatuna terminiga „avatud kontuuriga juhtimine", omab mõningaid olulisi puudujääke.
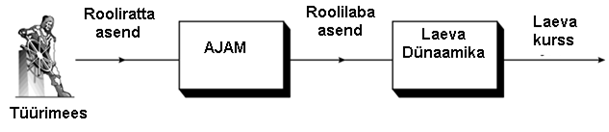
Ajami iseloomu muutudes -täiturmehhanismi, mis muudab roolilaba asendit - laev väljub etteantud kursilt kui tüürimees ei oma mittemingisugust informatsiooni liikumise suunast.
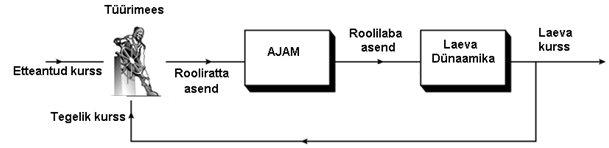
Juhul kui tüürimees jälgib laeva suunda kompassiga, võrdleb seda etteantuga ja keerab rooli nii, et vähendada selgunud viga, hoiab laev ligilähedaselt etteantud kurssi.
Võib märgata, et sellisel juhul tüürimees täidab kolme põhifunktsiooni -märkab kõrvalekallet tegeliku ja etteantu vahel, võtab vastu otsuse tegevuse korrigeerimiseks ja viib selle ellu rooliratta keeramisega.
See tegevus vea avastamise ja korrigeerimise vahel, aga samuti juhtimise osas on näidatud joonisel 6.8 kui tagasiside juhitava suuruse ja juhi vahel. Sellises süsteemis ei figureeri mitte ainult laeva liikumise suund etteantuna roolirattaga, vaid ka rooliratta asend sõltub sellest liikumissuunast. Kahe suuruse vastastikune sõltuvus - rooliratta asend ja laeva kurss - määrab kontseptsiooni, mida inseneride keskel nimetatakse tagasisideks, aga termin„automaatjuhtimissüsteem" tavaliselt kuulub automaatsüsteemide juurde, milline on üles ehitatud sellele kontseptsioonile; tihti selliseid süsteeme nimetatakse samuti „tagasiside juhtimissüsteemideks" või „suletud kontuuriga juhtimissüsteemideks".
Elektriajamites kasutatakse tagasisidet asendi, kiiruse, kiirenduse, jõu, momendi, voolu, pinge ja muude suuruste juhtimiseks. Kui oletada et ajami kiirust ja asendit mõõdetakse vastavate anduritega, siis võib ajami poolt positsioonjuhtimissüsteemis tekitatava jõu F viia nendest sõltuvusse.
Tagasiside on automaatika põhimõisteid. Tagasisidestatud süsteemid toimivad tehnikas ja looduses peaaegu kõikjal. Raske on kujutada inimese tegevust ilma kuulmise, nägemise või kompimise teel saadud tagasiside informatsioonita. Avatud juhtimissüsteeme kasutatakse suhteliselt harva ainult sel põhjusel, et nad on tunduvalt odavamad kui suletud süsteemid.
Avatud süsteemide korral kasutatakse juhtseadmes üksnes kella ning juhttoime moodustamine toimub vastavalt seadesisendile ning ajale. Avatud süsteemi kasutamisel peab selle projekteerija täpselt ette nägema süsteemi käitumise tulevikus. See eeldab, et süsteemi kohta on teada tema täpne mudel ning süsteemile toimivad ainult määratud sisendid. Tegelikult pole ükski süsteemi mudel absoluutselt täpne ning peaaegu alati toimivad süsteemile ka määramatud sisendid ehk häiringud. Muidugi on olemas ka süsteeme, mille juhtimine avatud süsteemis on isegi väga efektiivne, kuid suurem osa automaatjuhtimise probleeme on seotud suletud juhtimissüsteemide projekteerimisega.
Regulaatorid
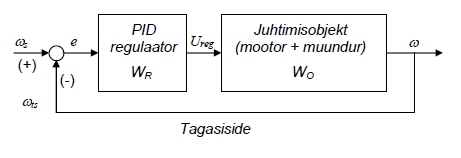
Traditsiooniliselt on ajameid juhitud väljundi vea järgi. Juhtimine toimub nn. proportsionaalse -integreeriva-diferentseeriva (proportional-integral-derivative) ehk PID regulaatoriga, mis võimaldavad kombineerida juhttoimet võrdeliselt veasignaalile selle integraalile ja/või tuletisele. Vastava toimega regulaatoreid nimetatakse eraldi proportsionaalseteks, integraalseteks ja diferentsiaalseteks ning tähistatakse vastavalt tähtedega P, I ja D. Kombineeritud regulaatorite lühendatud tähisteks on PI, PD ja PID. Joonisel 6.9 on näidatud mootori kiiruse stabiliseerimissüsteem, milles kasutatakse kiiruse tagasisidet ja PID regulaatorit.
PID regulaatoreid saab realiseerida pidevatoimelistena, nt. operatsioonivõimendite baasil, või diskreetsetena, ajami juhtkontrolleri programmina. Viimasel juhul nimetatakse regulaatorit arvregulaatoriks. Arvregulaatorite sisend- ja väljundfunktsioone esitatakse diskreetsete väärtuste jadana, kus muutujate hetkväärtused on fikseeritud ajaintervalli Δt järel. Funktsiooni tuletisteks aja järgi on vastavat järku diferentsfunktsioonid, integraalideks aga summafunktsioonid. Regulaatori väljundfunktsioon iseloomustab väljundsuuruse sõltuvust sisendsuurusest.
Tabel 6.1 Automaatjuhtimissüsteemides kasutatavad regulaatorid [3]
Juhtimine väljundi vea järgi
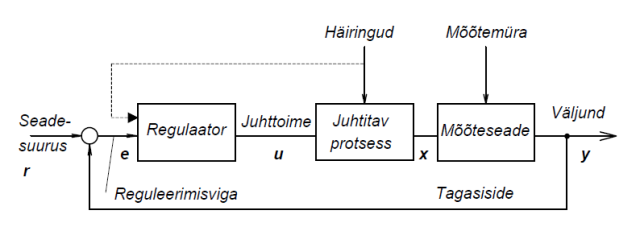
Lihtsaid süsteeme juhitakse kahel põhimõttel. Esimesel juhul moodustatakse juhttoime sõltuvalt reguleerimisveast. Kuna juhttoime moodustamiseks kasutatakse tagasisidet, on tegemist juhtimisega tagasiside põhimõttel. Teisel juhul moodustatakse juhttoime häiringute kompenseerimise põhimõttel. Enamasti kasutatakse mõlemat moodust kombineeritult ja juhttoime on sel juhul nii reguleerimisvea kui ka häiringu funktsioon. Juhttoime moodustamise seadet nimetatakse regulaatoriks. Häiringute kompenseerimise põhimõtet võib tagasiside põhimõttest eristada vaid teatud lihtsustuse korral, sest üldjuhul on mõõdetavad häiringud vaadeldavad samuti juhtimisobjekti väljunditena, nende kasutamine juhtimiseks aga tagasisidena.
Pideva või diskreetse programmi järgi töötavat automaatregulaatorit nimetatakse programmregulaatoriks. Programmregulaator koosneb programm- ehk etteandeseadmest ja regulaatorist. Programmseade salvestab, säilitab ning taasesitab programmi. Eri seadmetes kasutatakse selleks mehaanilisi, magnetilisi, elektrilisi ja optilisi andmekandjaid. Regulaator võrdleb objekti programmikohast olekut tegelikuga ning moodustab juhttoimed.
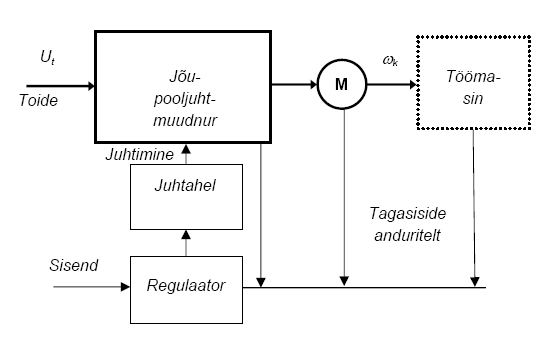
Juhtimisobjektil on alati teatud struktuur. Tehnilisi ja tehnoloogilisi juhtimisobjekte võib vaadelda koosnevana juhitavast protsessist ja mõõteseadmest (joonis 6.10). Protsessi juhtimise all mõistetakse ka mingi täiturseadme talitluse juhtimist. Mõõteseade annab juhtimisobjekti töö kohta infot. Protsessi kulgu ja mõõteseadme tööd mõjutavad häiringud, mida nimetatakse vastavalt protsessi- ja mõõtehäiringuteks või protsessi- ja mõõtemüraks.
Lihtsa juhtimissüsteemi näide on joonisel 6,11 kus juhtimisobjektiks on alalisvoolumootor M ja reguleeritavaks suuruseks tema pöörlemissagedus ω. Mootorit toidetakse juhitava pingega toiteallikast TA (nt. juhitavast alaldist) ja mootori pöörlemisagedust ω mõõdetakse tahhogeneraatoriga TG (pöörlemissageduse andur). Pinge potentsiomeetri P klemmidel Uω on võrdeline pöörlemissagedusega ω ja seda võrreldakse seadesuurusega U0.
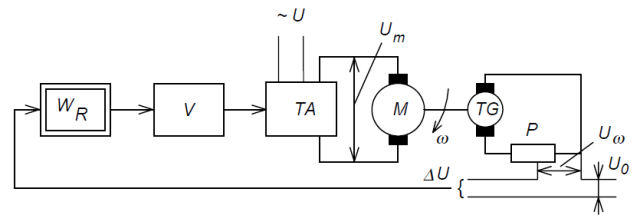
Reguleerimisviga ΔU =Uω −U0 antakse regulaatorisse WR. Regulaator väljastab juhttoime, kusjuures regulaatoriks võib olla ka korrigeerimislüli või filter. Juhttoime võimendatakse võimendis V ja suunatakse juhtiva toiteallika TA juhtimissüsteemi, mis muudab pinget toiteallika klemmidel nii, et pöörlemiskiirus ω oleks konstantne.
Elektriajamite juhtimise kontaktskeemid
Elektriajamite kontaktjuhtimisskeeme kujutatakse laotatud põhimõtte-skeemidena, kus juhtimisskeemi aparaatide elemente (kontakte, mähiseid jne) on kohtadel, kus nad täidavad mingit kindlat ülesannet. See võimaldab paremini mõista skeemi tööpõhimõtet.
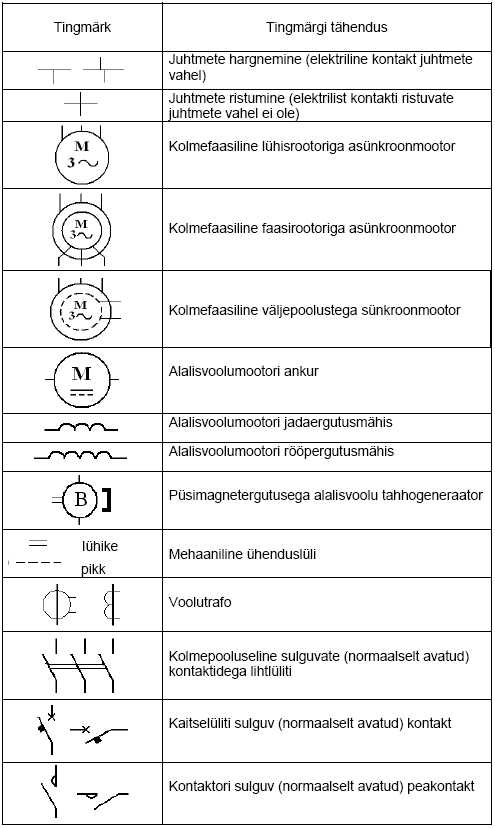
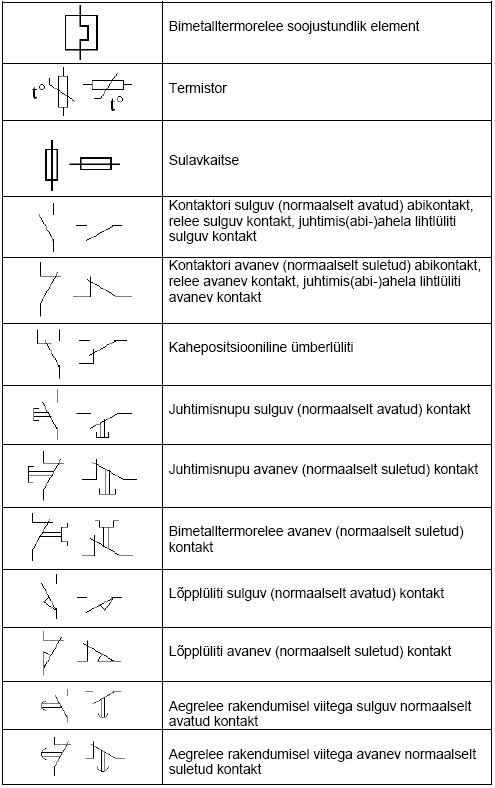
Elektriajamite juhtimisskeemid koosnevad jõuahelatest ja juhtimisahelatest. Jõuahelateks on ahelad, milliseid läbib elektrimootori töömähiste koormusvool (asünkroonmootori rootori- ja staatorimähiste ahelad, sünkroonmootori staatorimähise ahel, alalisvoolumootori ankrumähise ahel). Juhtimis- ehk abiahelateks on kõik ülejäänud juhtimisskeemi ahelad. Jõuahelaid kujutatakse skeemidel jämeda joonega, juhtimisahelaid peene joonega. Juhtimisskeemidel sagedamini kasutatavaid tingmärke on kujutatud tabelis 1.
Tabel 1. Elektriajamite juhtimisskeemidel kasutatavad tingmärgid
Peale graafiliste tingmärkide kantakse juhtimisskeemidele mitmesuguseid vooluliike, juhtmestikku ja juhtimisaparaate tähistavaid täht- ja muid tähiseid. Neid kasutatakse kas iseseisvatena või kombineerituna teiste tähistega (tabel 2).[1]
Tabel 2. Elektriajamite juhtimisskeemidel sagedamini kasutatavad tähised [1]
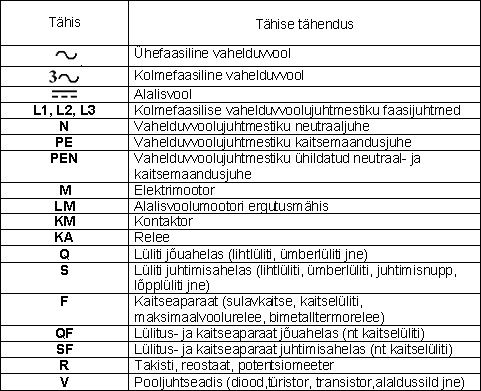
Juhtimisaparaatide kontakte tähistatakse juhtimisskeemidel lähteasendis, samatüübiliste juhtimisaparaatide tähttähised varustatakse järjekorra numbritega näiteks (KM1, KM2,…, KMn); vajadusel varustatakse järjekorranumbritega ka juhtimisaparaadi osade täht-tähised, näiteks mitmepositsioonilise ümberlüliti kontaktid S1.1, S1.2,…, S1.n.
Mõisteid juhtimisaparaatide ülesannete eristamiseks:
- liini- ehk pealüliti – lüliti, mille abil ühendatakse juhtimisskeem toiteallikaga;
- liinikontaktor – kontaktor, mille peakontaktide abil ühendatakse juhtimisskeemi jõuahelad toiteallikaga;
- suuna- ehk reversseerimiskontaktor – kontaktor, mille abil toimub mootori pöörlemissuuna muutmine;
- kiirenduskontaktor – kontaktor, mille peakontaktide abil lülitatakse juhtimisskeemi jõuahelast välja käivitustakisti või –reostaat. Kiirenduskontaktoreid võib olla juhtimisskeemis rohkem kui üks;
- kiirendusrelee – kiirenduskontaktori tööd juhtiv relee;
- pidurduskontaktor – kontaktor, mille peakontaktide abil lülitatakse juhtimisskeemi jõuahelasse pidurdusvoolu piirav pidurdustakisti;
- pidurdusrelee – pidurduskontaktori tööd juhtiv relee.
Ajamite jõuahelate lülitused
Reostaatkäivitus, -pidurdus ja -reguleerimine
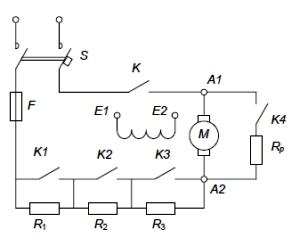
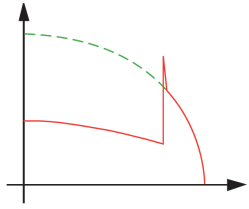
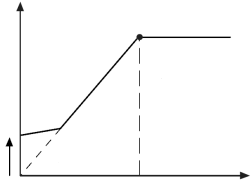
Mootori voolu piiramiseks, sujuvaks kiirendamiseks ja aeglustamiseks on traditsiooniliselt kasutatud reostaatkäivitust ja reostaatpidurdust. Samuti saab reostaate kasutada mootori kiiruse reguleerimiseks. Reostaatkäivitus, -pidurdus ja -reguleerimine olid valdavalt kasutusel pooljuhtmuundurite eelsel ajal, mil masina toitepinge ja/või sageduse reguleerimine oli seotud suurte raskustega. Alalisvoolumasina reostaatkäivitust, -reguleerimist ja -pidurdust võimaldav lülitus on näidatud joonisel 6.12 Mootori ankruahelasse on lülitatud takistid R1, R2 ja R3. Ankruahela summaarne takistus Ra sum=R1+R2+R3. Mootori käivitusvool on pöördvõrdeline ankruahela takistusega: Ia=Ua/Ra sum. Takistuse suurenemisel väheneb vooluga võrdeliselt ka mootori moment Tm=kmΦIa, kus km on masina ehitusest konstant tegur Ф on magnetvoog. Mootori käivitamisel lülitatakse algul ankruga jadamisi kõik takistid ning käivitamine toimub vastavalt mootori tunnusjoonele 1, kuni vool väheneb läveni I1. Seejärel sulgub kontakt K1, ankruahela takistus väheneb ning käivitus jätkub vastavalt mootori tunnusjoonele 2. Voolu vähenemisel läveni I1 sulgub kontakt K2 ning käivitusprotsess jätkub vastavalt tunnusjoonele 3. Viimasena sulgub kontakt K3 ning mootori talitlus jätkub voolu-kiiruse loomulikul tunnusjoonel. Takistite astmelise lülitamise asemel saab kasutada ka sujuvalt liugkontaktiga reguleeritavaid takisteid. Suurtel vooludel ja võimsustel on reguleeritavate takistite kasutamine liugkontakti väikese töökindluse tõttu raskendatud.
Alalisvoolumootori reostaatpidurdusel lahutatakse mootor kontakti K abil toiteahelast ning lülitatakse kontaktiga K4 sisse pidurdustakisti Rp. Pöörlev masin alustab tööd generaatorina, voolu suund muutub vastupidiseks ning kiirus väheneb vastavalt pidurdustunnusjoonele 4. Pidurdamise intensiivsus sõltub pidurdustakistuse ja ankruvoolu suurusest.
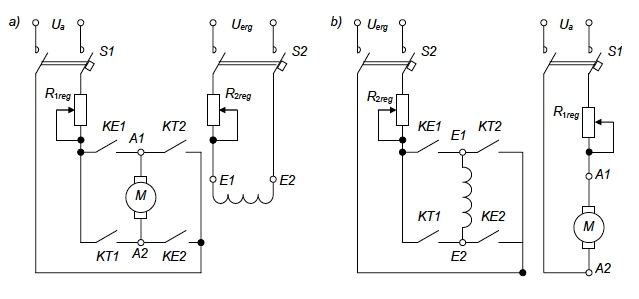
Alalisvoolumootori pöörlemissuunda saab muuta voolu suuna muutmisega kas ankru- või ergutusmähises. Selleks kasutatakse sildlülitusi (joonis 6.13). Edasisuunas pöörlemisel on suletud edasisuuna kontaktori kontaktid KE1 ja KE2 ning tagasisuunas pöörlemisel vastavalt tagasisuuna kontaktori kontaktid KT1 ja KT2. Kui samaaegselt muuta voolu suunda nii ankru- kui ka ergutusmähises, siis mootori pöörlemissuund ei muutu. See tõsiasi on nii alalis- kui ka vahelduvvooluvõrgust toidetavate universaalmootorite tööpõhimõtte aluseks. Joonisel näidatud mootorite pöörlemiskiirust nimikiirusest allapoole saab reguleerida ankruahelasse lülitatud takistiga R1reg. Mootorite kiirust nimikiirusest ülespoole saab reguleerida ergutusvoolu vähendamise ja magnetvälja nõrgendamisega takistiga R2reg.
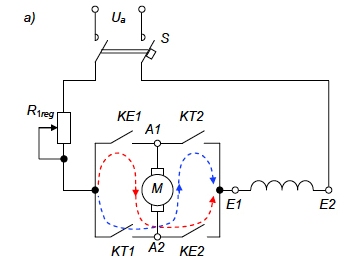
Jadaergutusega alalisvoolumootori reverseeritav juhtimislülitus on näidatud joonisel 6.14 Pöörlemissuuna muutmine toimub ankrumähise ümberlülitamisega. Ergutusvoolu suund jääb seejuures samaks. Jadaergutusega mootorid on kasutusel elektersõidukite veoajamites.
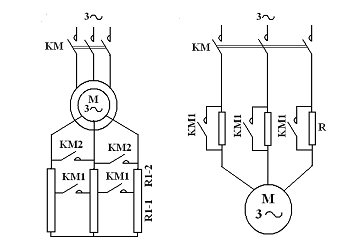
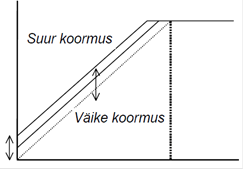
Reostaatkäivituse ja reostaatreguleerimise näiteks on ka faasirootoriga vahelduvvoolumootori juhtimislülitus (joonis 6.15). Mootori rootoriahelasse on lülitatud takistid R1 ja R2, mida lühistatakse kontaktidega K1, K2 ja K3. Kahe takistuse R1 + R2 jadaühendusele vastab mootori mehaaniline tunnusjoon 1 (joonis 1, b). Suletud kontaktide K2 puhul jääb rootoriahelasse takisti R2, millele vastab mehaaniline tunnusjoon 2. Suletud kontaktide K3 puhul on rootoriahel lühistatud millele vastab mootori loomulik mehaaniline tunnusjoon 3. Mootori reostaatkäivitamisel suletakse kontakte K1…K3 kas sõltuvalt ajast, voolust või momendist. Mootori tööpunkti muutumine mehaanilistel tunnusjoontel 1…3 on joonisel näidatud nooltega.
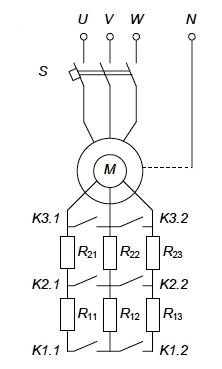
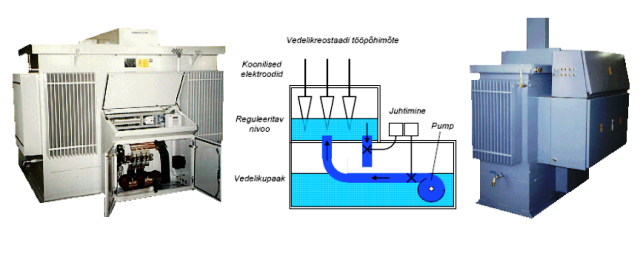
Faasirootoriga mootorid on peamiselt kasutusel eriti võimsates ajamites (üle 1 MW). Seepärast peavad ka rootoriahelasse lülitatud takistid ja kontaktid taluma väga suuri voolusid. Probleemiks on ka takistites eralduva soojuse hajutamine. Nende probleemide lahendamiseks kasutatakse rootoriahelas õlijahutusega reostaate (joonis 6.16) ning vedelikreostaate, mille puhul takistuseks on reguleeritava pikkusega vedelikusammas. Väiksematel võimsustel valmistatakse resistorid ja reostaadid isoleeralusele keritud takistustraadist, isolaatoritele paigaldatud metallribadest või plaatidest.
Kontaktjuhtimisskeemide tüüpsõlmed
Reverss
Asünkroonmootori reversseerimiseks tuleb muuta tema pöörleva magnetväljapöörlemissuunda, milleks tuleb muuta faasijärjestust tema staatorimähise klemmidel.
Alalisvoolumootori reversseerimiseks tuleb muuta voolu suunda kas tema ankrumähises või ergutusmähises (tavaliselt ankruvoolu suunda) - muudetakse polaarsust ankru klemmidel.
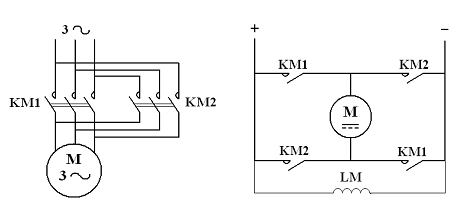
Joonisel 6.17 on kujutatud reversseeritavate kolmefaasilise lühisrootoriga asünkroonmootori ning rööpergutusega alalisvoolumootori juhtimisskeemid. Reversseerimine (pöörlemissuuna muutmine) toimub suunakontaktorite KM1 ja KM2 abil.
Suunakontaktorit juhtimisskeemi on kujutatud joonisel 6.18 Pöörlemissuuna valimine toimub surunuppude S2 ja S3 abil, millistele vajutades saavad toite vastavaltkas suunakontaktori KM1 või KM2 elektromagneti mähis.Kontaktor KM1 või KM2 rakendub ning tema peakontaktid mootori jõuahelas sulguvad, andes toite mootori töömähisele. Samal ajal lülituvad ümber ka KM1 või KM2 abikontaktid – sulguvad abikontaktid (hoide- ehk omatoitekontaktid) sulguvad, shunteerides surunuppude S2 või S3 sulguvad kontaktid, avanevad abikontaktid (blokeerimiskontaktid) aga avanevad vältimaks mõlema suunakontaktori üheaegset rakendumist.

Allikas: Rein Kask, ELEKTRIAJAMITE JUHTIMINE, Õppevahend TPT energeetika õppesuuna õpilastele, Tallinn 2006, 67 lk
Mootori reversseerimiseks (pöörlemissuuna muutmiseks) tuleb vajutada vastassuuna surunupule. Kui mootor töötas näiteks pöörlemissuunas, mis on määratud suuna-kontaktori KM1 rakendunud seisundiga, siisvajutades surunupule S3 katkestab tema avanev kontakt suunakontaktori KM1 mähise ahela. Selle tulemusena avanevad KM1 peakontaktid mootori jõuahelas, avaneb ka KM1 surunupu S2 sulguvat kontakti shunteeriv hoidekontakt, sulgub aga KM1 avanev blokeerimiskontakt suunakontaktori KM2 mähise ahelas, valmistades sellega ette ahela KM2 rakendumiseks. Viimane rakendubki tänu surunupu S3 sulguva kontakti sulgumisele. Kontaktor KM3 rakendub, tema peakontaktid mootori jõuahelas sulguvad, sulgub samuti tema sulguv hoidekontakt, shunteerides surunupu S3 sulguva kontakti, avanev abikontakt kontaktori KM1 mähise ahelas aga avaneb, vältides viimase rakendumise. Mootor käivitub vastassuunas. Mootorit võib igal hetkel välja lülitada surunupu S1 abil.
Käivitus
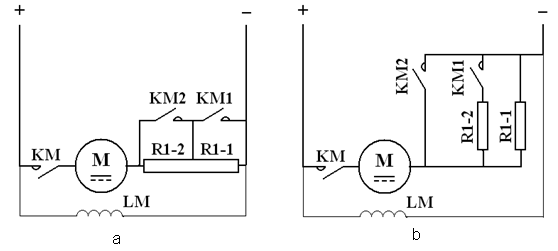
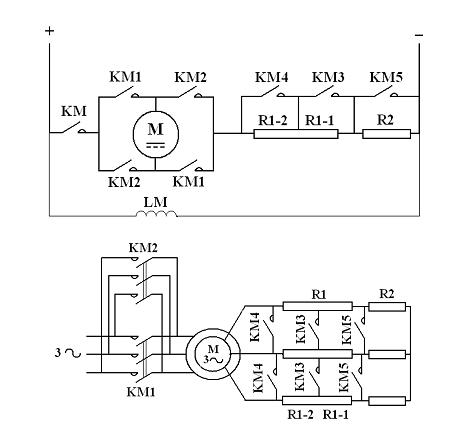
Alalisvoolumootorite käivitusreostaatide juhtimisskeemide jõuahelaid on kujutatud joonisel 6.19
Allikas: Rein Kask, ELEKTRIAJAMITE JUHTIMINE, Õppevahend TPT energeetika õppesuuna õpilastele, Tallinn 2006, 67 lk
Mootori käivitamiseks lülitatakse töösse liinikontaktor KM, milline oma sulguva peakontaktiga pingestab nii mootori ankru- kui ergutusahela. Kiirenduskontaktorite KM1 ja KM2 peakontaktid on avatud ja seega on ankruahelasse lülitatud jadamisi käivitusreostaadi sektsioonid R1-1 ja R1-2 (joonis 3.a) või käivitusreostaadi sektsioon R1-1 (joonis 1.2.b). Käivitusvoolu vähenemisel rakendub kiirenduskontaktor KM1, shunteerides käivitusreostaadi sektsiooni R1-1 (joonis 3.a) või lülitades käivitusreostaadi sektsiooniga R1-1 rööbiti sektsiooni R1-2 (joonis 3.b). Esimene käivitusaste on lõppenud, mootori ankruahela takistus on hüppeliselt vähenenud. Selle tulemusena toimub käivitusvoolu hüppeline suurenemine. Mootori kiiruse edasisel kasvamisel hakkab käivitusvool uuesti vähenema, kuni rakendub kiirenduskontaktor KM2, shunteerides käivitusreostaadi sektsiooni R1-2 (joonis 3.a) või mõlemad käivitusreostaadi sektsioonid (joonis 3.b). Kui käivitusreostaadil on skeemidel kujutatust rohkem sektsioone, hakkab kirjeldatud protsess korduma seni, kuni kõik käivitusreostaadi sektsioonid on kiirenduskontaktorite peakontaktidega shunteeritud (välja lülitatud).
Asünkroonmootorite käivitusreostaadi ja –takisti juhtimissõlmede jõuahelaid on kujutatud joonisel 6.19
Mootor käivitatakse liinikontaktori KM rakendumise tulemusena, kiirenduskontaktorid KM1, KM2 jne ei ole rakendunud. Faasirootoriga asünkroonmootori rootoriahelasse on lülitatud käivitusreostaat, lühisrootoriga asünkroonmootori käivitusvoolu piiratakse käivitustakistiga R staatoriahelas. Edasine käivitusprotsess on analoogne alalisvoolumootori käivitusega, st vastavalt käivitusvoolu muutumisele hakkavad järjekorras rakenduma kiirenduskontaktorid KM1, KM2 jne, lülitades käivitusreostaadi sektsioonid R1-1, R1-2 jne rootoriahelast välja või shunteerides staatoriahelas oleva käivitustakisti R.
Pidurdus
Rööpergutusega alalisvoolumootori ja faasirootoriga asünkroonmootori vastulülituspidurduse skeemide jõuahelaid on kujutatud joonisel 6.20
Vastulülituspidurdus on mootori reversseerimise esimene etapp, mis toimub reversseerimise tüüpsõlme abil, mis koosneb suuna- ehk reversseerimiskontaktorite KM1 ja KM2 peakontaktidest. Vastulülituspidurdust iseloomustab käivitusvoolust suurem voolutõuge ja selle piiramiseks lubatava väärtuseni tuleb alalisvoolumootori ankruahelasse või faasirootoriga asünkroonmootori rootoriahelasse lülitada suure takistusega pidurdus-takisti.
Käivitamisel on pidurduskontaktori KM5 peakontakt(id) suletud ja käivitusvoolu piiramine toimub ainult käivitusreostaadiga, mille sektsioone juhitakse kiirenduskontaktoritega KM3 ja KM4. Pidurdamise ajal on kõik ankru- või rootoriahelasse lülitatud kontaktorite peakontaktid avatud ja nimetatud ahelate takistused on maksimaalsed.
Asünkroonmootori dünaamilise pidurduse skeemi jõuahelaid on kujutatud joonisel 6.21
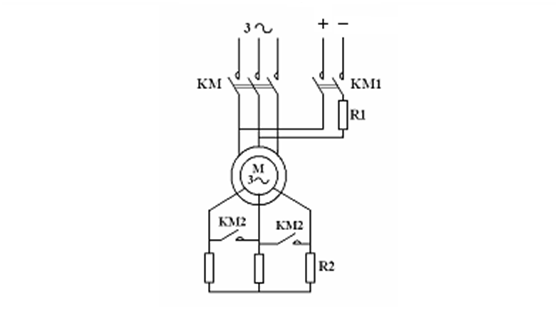
Asünkroonmootori dünaamiliseks pidurdamiseks lahutatakse tema staatorimähis liinikontaktori KM sulguvate peakontaktide avanemisega toitevõrgust ning staatorimähis ühendatakse pidurduskontaktori KM1 sulguvate kontaktide sulgumise tulemusena alalisvooluallikaga. Staatorimähises voolav alalisvool tekitab ruumis liikumatu alalismagnetvälja, milles pöörleva rootori mähises indutseeritakse vool ning staatori magnetvälja ja rootorimähise voolu koostoimel tekibki pidurdav moment. Faasirootoriga mootori korral on otstarbekas lülitada pidurdamise ajaks rootoriahelasse lisatakisti R2, mille tulemusena suureneb algpidurdusmoment. Pidurdamise käigus lülitatakse lisatakisti R2 mingil hetkel kontaktori KM2 sulguvate kontaktide sulgumise tulemusena välja ja see võte võimaldab kindlustada laias kiiruse muutumise vahemikus praktiliselt konstantse pidurdusmomendi.
Elektrimootorite kaitse
Elektriajami mootor ja teised elektriajami elektrilised osad ja ahelad peavad olema kaitstud mitmesugustel põhjustel tekkivate kahjustuste ja nende edasise arenemise eest. Vajalikud kaitseseadmed lülitatakse nii elektriajami jõu- kui juhtimisahelatesse.
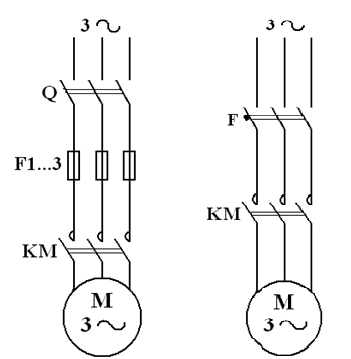
Kaitse lühise eest ja maksimaalvoolukaitse kindlustavad lühisesse sattunud või liigvoolu tingimustes oleva elektriahela viivituseta väljalülitamise. Kaitseks kasutatakse kas sulavkaitsmeid või elektromagnetilise vabastiga kaitselüliteid (joonis 6.22).
Maksimaalvoolukaitseks kasutatakse maksimaalvoolureleesid, lülitades nende mähised kaitstava mootori jõuahelasse, normaalselt suletud kontaktid aga liinikontaktori mähise ahelasse.
Kolmefaasilise asünkroonmootori korral kasutatakse kaht või kolme maksimaalvoolureleed, alalisvoolumootori korral üht või kaht releed.
Elektriajamite kontaktivaba juhtimine
Diskreetse toimega kommuteerivate kontaktidega elektromehaanilistel aparaatidel, nt kontaktorid, mitmesugused releed jne on olulisi puudusi:
- nende mehaanilised osad on suurtel lülitussagedustel lühikese tööeaga;
- nad on suhteliselt aeglasetoimelised;
- nad vajavad süstemaatilist hooldust, seadistamist ja remonti või hoopiski väljavahetamist;
- nad on kokkuvõttes madala töökindlusega.
Selleks et tõsta juhtimisskeemide töökindlust ja kiiretoimelisust on võetud nende asemel kasutusele mitmesugused kontaktivabad diskreetse toimega kontaktivabad aparaadid.
Enamus kontaktivabasid aparaate on staatilised, st neil ei ole liikuvaid osasid. Nad ei lahuta galvaaniliselt elektriahelaid ning juhtimissignaalid saadakse nende koostis-osade parameetrite diskreetse muutumise tulemusena, tänu nende mittelineaarsetele tunnusjoontele (transistorid, dioodid, türistorid jne). Selliste aparaatide hulka kuuluvad mitmesugused induktiiv-, mahtuvus- ja generaatorandurid, mitmesugused võimendid, fotoelektrilised elemendid, kontaktivabad loogikaelemendid jne.
Kontaktivabad aparaadid on pikema tööeaga, nende teenendamine nõuab vähem aega, nad on töökindlamad ja kiiretoimelisemad. Nende puudusteks on tundlikkus välishäiringute vastu ning temperatuuri mõju nende stabiilsusele, kuid neid puudusi saab kõrvaldada või oluliselt vähendada mitmesuguste võtete abil.
Staatilised kontaktivabad aparaadid on elektromehaaniliste kontaktaparaatidega analoogse tegevusega. Ka neil on diskreetne tööiseloom (oleku hüppeline muutus), mis on kirjeldatav kahe seisundiga, millised vastavad mõistetele „sisse lülitatud” ja „välja lülitatud”. Mõiste „sisse lülitatud” all mõistetakse aparaadi sellist olekut, mille korral tema väljundis on kasulik signaal, näiteks pinge täisväärtus, signaali (pinge) puudumine aga vastab seisundile „välja lülitatud”. Matemaatiliselt kirjeldatakse neid seisundeid kahendsüsteemi sümbolitega „1” ja„0”.
Elektriajamite juhtimisskeemides on leidnud kõige rohkem kasutamist diskreetse toimega kontaktivabad loogikaelemendid. Nende baasil koostatakse juhtimisskeemi loogikaosa, kus sõltuvalt signaalidest elementide sisendeil tekivad nende ja samuti skeemi väljunditel signaalid „1”või „0”. Need signaalid võimendatakse ning nad juhivad täiturelemente (kontaktorid, kontaktivabad türistorkommutaatorid, elektromagnetid jne). Juhtimissignaalide kogumit, mis on vajalik kontaktivabadest loogikaelementidest, käsklus- ja täituraparaatidest koosneva skeemi toimimiseks, saab kirjeldada loogikaalgebra valemitega. Need valemid kirjeldavad kõiki süsteemi elementide vahelisi seoseid ja sõltuvusi sõltumatute muutujate ja nende funktsioonide näol, millistel võivad olla väärtused „1” või „0”. Loogikaelemendid kui elementaarseid loogikafunktsioone realiseerivad seadmed võivad samuti olla tähistatult loogikaalgebra sümbolitega.
Kontaktivabad juhtimisskeemid võivad olla koostatud elementaarseid loogika-funktsioone realiseerivatekontaktivabade loogikaelementide baasil, kuid võib ka kasutada keerukamaid loogikafunktsioone täitvaid elemente, mis võimaldab vähendada elementaarloogikafunktsioone täitvate elementide arvu ning muudab juhtimisskeemi töökindlamaks ja hõlbsamalt käitatavaks.
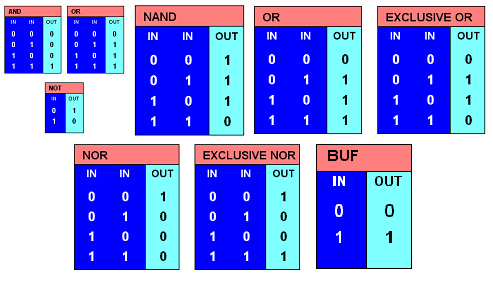
Kontaktivabad loogikaelemendid ja loogikaelementide süsteemid
Kontaktivaba loogikaelement on suundtoimega kontaktideta seadis, mis mingi kahendsignaalide, st kahe võimaliku väärtusega signaalide kombinatsiooni puhul tema sisendeil annab teatava kahendsignaali väljundis.
Rahvusvaheliselt tähistatakse loogikaelemente alljärgnevalt:
AND – NING (JA) – konjunktsioon;
OR – VÕI – disjunktsioon;
NO – EI – inversioon ehk eitus;
NAND – NING (JA)-EI ehk Shefferi kriips;
NOR – VÕI-EI ehk Peirce´i nool;
EXCL NOR ehk XNOR – ekvivalentsus;
EXCL OR ehk XOR – välistav VÕI.
Peale selle kuuluvad loogikaelementide hulka ka mitmesugused mäluelemendid – trigerid: RS-triger, takteeritav RS-triger, JK-triger, Schmitti triger. Trigerid ei tee mingeid loogikatehteid. Lisandub veel viiteelement ajaliste viidete tekitamiseks.
Potentsiaalelementide sisend- ja väljundsignaalideks on kahe erineva potentsiaali või nivooga alalispinged. Üks nivoodest vastab loogikamuutuja väärtusele „1”, teine väärtusele „0” (loogilised nivood). Kui loogilise „1” nivoo on kõrgem kui loogilisel ”0” -l, on tegu positiivse loogikaga, kui vastupidi – negatiivse loogikaga.
Impulsselementide sisend- ja väljundsignaalideks on pingeimpulsid. Muutuja väärtusele „1” vastab impulss, väärtusele „0” aga impulsi puudumine (või ka vastu-pidi). Kui mingi elemendi sisendisse saabub impulsside kombinatsioon, millele elemendi väljundis peab vastama kahendmuutuja väärtus „1”, siis annab element väljundahelasse üheainsa impulsi. Seega ei signaliseeri impulsselemendid oma olekust pidevalt, vaid ainult ühekordselt – uude olekusse ülemineku hetkel.
Harilikult on impulsssüsteemid kujundatud sünkroonsüsteemidena. Elemendid ei genereeri impulsse mitte meelevaldsetel hetketel, vaid ainult teatavatel hetketel, millised on määratud keskse taktgeneraatoriga või mõne muu sünkroniseerimis-seadmega. Seega on impulsssüsteemi talitlus korraldatud sammude või taktidena.
Allikas: http://encyclopedia2.thefreedictionary.com/Binary+logic+elements
Lihtsaimaks näiteks on mittereversseritava asünkroonmootori juhtimisskeem, kusjuures mootor on kaitstud lühise eest sulavkaitsmetega F1…F3 ja ülekoormuse eest bimetalltermoreleega F4. Asünkroonmootori kontaktjuhtimisskeem ja teda asendavat kontaktivaba juhtimisskeem on kujutatud joonisel 6.24
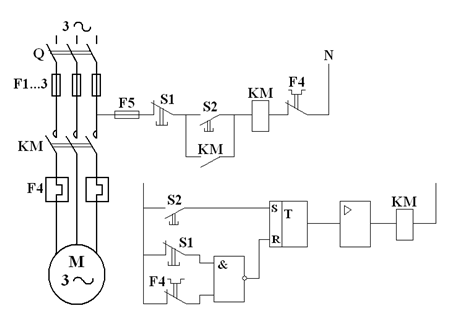
Kontaktivaba juhtimisskeem koosneb ühest NING-EI loogikaelemendist, trigerist ja võimendist rakendamaks töösse kontaktori mähise.
Lähteseisundis puuduvad signaalid nii trigeri sisendil S kui R (nii stoppnupu kui termorelee kontakt on suletud, st NING-EI elemendi väljundil puudub signaal). Järelikult puudub signaal ka trigeri väljundil ja seega on võimendi sisendpinge võrdne nulliga ning puudub ka pinge kontaktori KM mähisel. Kui vajutada käivitusnuppu, tekib signaal trigeri sisendil S, ta lülitub ümber, annab signaali võimendi sisendisse ja lõpptulemusena rakendub kontaktor KM. Mootor käivitub. Kui nüüd vajutada stoppnuppu või kui rakendub ülekoormuse tõttu termorelee F4, tekib signaal NING-EI elemendi väljundil, st trigeri sisendil R ja viimane taastab oma lähteseisundi, st signaal tema väljundil kaob. Võimendi sisendil kaob pinge ja kontaktor KM tagastub. Mootor lülitub välja.
Juhitava alaldi või pingeregulaatoriga alalisvooluajam
Mõisted alalisvoolumasin ja alalisvooluajam (DC drive) pole tänapäeval mitmel põhjusel enam nii selged kui varem. Esiteks, elektrimasina tööpõhimõte eeldab, et tema mähiste voolu tuleb perioodiliselt kommuteerida, mistõttu kõikide elektrimasinate mähistes on tegelikult vahelduvvool. Teiseks, traditsioonilist mehaanilise kollektoriga alalisvoolumasinat kasutatakse tänapäeval üha harvemini ning selle asemele on tulnud nn. harjadeta (burshless DC motor) ehk pooljuhtkommutaatoriga mootorid. Oma ehituselt on niisugune mootor võrreldav sagedusmuundurist toidetava vahelduvvoolu sünkroonmasinaga. Lisagem, et mõlema masina puhul tekitatakse vooluahelatest eraldi ergutusväli kas püsimagnetite või ergutusmähise abil. Kolmandaks, elektriajamite toitevõrguna kasutatakse vahelduvvooluvõrku, mille pinge mootorite toitemuundurites alaldatakse. Alaldid kuuluvad tüüpilise komponendina nii vahelduvvooluajamite kui ka alalisvooluajamite toitemuundurite koosseisu.
Reguleeritava alalisvoolutoitega ajamid võivad põhineda nii juhitaval alaldil kui ka mittejuhitaval alaldil ja alalisvooluga toidetaval pingeregulaatoril. Reeglina põhinevad suurema võimsusega ajamid juhitavatel türistoralalditel ja väiksema võisusega ajamid IGBT transistoridel pingeregulaatoritel.
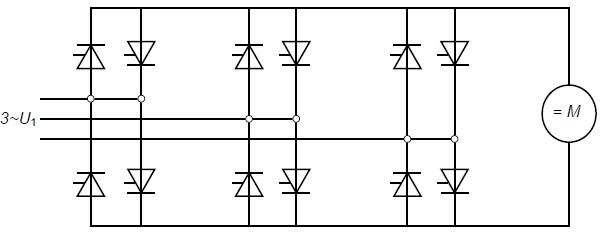
Alalisvooluajami üks võimalikest lülitustest on esitatud joonisel 6.25 Ajami jõuahel koosneb mittejuhitavast alaldist, filtrist, pidurikommutaatorist ja neljakvadrandilisest pulsilaiusmuundurist. Joonisel on näidatud juhitavate pooljuhtlülititena GTO türistorid, mida põhiliselt kasutatakse suurtel võimsustel. Väiksematel võimsustel kasutatakse pooljuhtlülititena IGBT transistore. Kuna mittejuhitav alaldi ei võimalda energiavahetust toitevõrguga, siis on vaja juhtida mootori generaatoritalitluse puhul genereeritav energia kas filtri kondensaatorisse CF, mille pinge sel juhul kasvab, või hajutada see pidurdustakistis RB soojusena. Selleks lülitatakse sisse pidurikommutaator (break chopper) PLB.
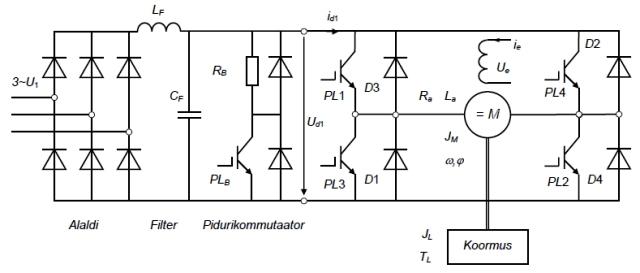
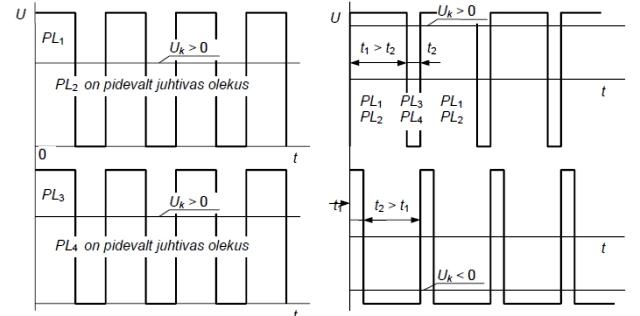
Neljakvadrandiline pulsilaiusmuundur võimaldab alalisvoolumasina talitlust momendi kiirustasandi kõigis neljas kvadrandis, s.t. ajami talitluse ajal võib sõltuvalt tööprotsessist muutuda nii kiiruse kui ka momendi märk ning alalisvoolumasin võib töötada nii mootorina kui ka generaatorina (joonis 6.26). Pulsilaiusmuundurit saab juhtida kahel eri viisil. Esiteks, mootori pöörlemissuuna võib valida pooljuhtlülitite paariga PL1 ja PL2 või PL3 ja PL4. Kui üks paar on valitud, jääb teine lülitipaar pidevalt väljalülitatuks, kui mootori pöörlemissuund ei muutu.
Muunduri pinget ja mootori kiirust reguleeritakse sisselülitatud pooljuhtlülititega (nt. PL1, PL2) pulsilaiusmodulatsiooni põhimõttel. Pinge ja kiiruse reguleerimiseks piisab sel juhul ka ühe pooljuhtlüliti (nt. PL1) pulsilaiusjuhtimisest. Mootori pöörlemissuuna muutmiseks tuleb muuta pinge ja voolu suunda. Selleks lülitatakse pooljuhtlülitite paar (nt. PL1 ja PL2) välja ning teine lülitipaar (nt. PL3 ja PL4) sisse ja muudetakse mootori kiirust reguleeritakse pooljuhtlülitiga PL3.
Neljakvadrandilist muundurit saab kasutada ka nii, et pooljuhtlüliteid kommuteeritakse paarikaupa (PL1, PL2) ja (PL3, PL4). Sel juhul moodustub väljundis nelinurkne vahelduvpinge, mille keskväärtust saab reguleerida pooljuhtide suhtelise lülituskestusega. Pinge positiivse ja negatiive poolperioodi võrdse kestuse korral on väljundpinge keskväärtus null.
Mootori ankruahela toiteks kasutatakse juhitavat türistoralaldit ja ergutusahela toiteks IGBT pingeregulaatorit. Sõltuvalt türistoralaldi ehitusest (6 või 12 ventiili) võib ajam töötada kiiruse momenditasandi 2 või 4 kvadrandis. Viimasel juhul kasutatakse kahte teineteisele vastupidise polaarsusega silda (joonis 6.27). Kahe silla ühes harus olevad 2 vastuparalleelset türistori saab asendada ühe sümmeetrilise türistori ehk sümistoriga. Alaldi konstruktsioon muutub sel juhul kompaktsemaks ning juhtimine lihtsamaks.
Ajami võimsus sõltub kiirusest, kusjuures eristatakse kolme piirkonda: konstantse momendiga talitlust, konstantse võimsusega talitlust ning kiirusega pöördvõrdelise võimsusega talitlust (joonis 6.28). Neist viimane vastab töötamisele magnetvälja nõrgendusalas. Piirkiirus ωf, millest alates tuleb mootori võimsust vähendada, on määratud mootori kollektori lamellide ja harjade kommutatsioonivõimega.
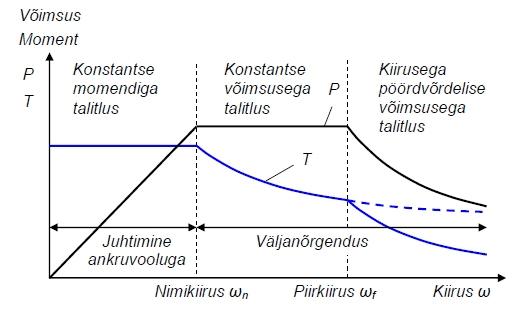
Allikas: Viktor Beldjajev, Täiturmehhanismid, loengumaterjalid, Tallinna Tehnikaülikool, Elektriajamite ja jõuelektroonika instituut –Tallinn, 2010. 81 lk.
Sujuvkäivitiga ajam
Sujuvkäiviti ja tema tööpõhimõte
Sujuvkäiviti on türistoridel töötav vahelduvpingeregulaator, mis on ette nähtud asünkroonmootorite sujuvaks käivitamiseks (väikese voolutõukega), pidurdamiseks või peatamiseks ja energiasäästu saamiseks muutlikul koormusel. Kiirendus – ja aeglustusrambid on kasutaja poolt sätitavad. Lisaks sellele võimaldavad sujuvkäivitid dünaamilist pidurdust, lühiajalist väikekiirusel pöörlemist (kuni 120 s). Raske käivitustalitluse puhul (masina seisuhõõrde ületamiseks) saab rakendada ka löökkäivitusimpulsi (kick start). Firma ABB sujuvkäiviti on näidatud Joonis .29.

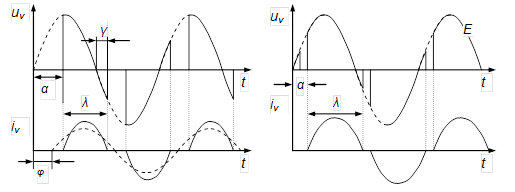
Tavaliselt koosneb vahelduvpingeregulaator kahesuunalistest (nt sümistoridest) või vastuparalleelselt ühendatud pooljuhtventiilidest (nt türistoridest). Pinget muudetakse türistoride tüürnurkade α juhtimisega, millega saavutatakse pinge madalam efektiivväärtus. Sujuvkäiviti ei muuda sagedust, seega ei sobi sujuvkäiviti kiiruse reguleerimiseks. Joonis 6.30 on näha, punktiirjoonega pinge muutumist võrgus ning sellest tekkivat elektrivoolu. Kui teatud momendil, nurk alfa, lülitatakse türistor sisse, siis langeb mootorile ainult osa tervest siinuspinge poolperioodist. Tüürnurk määrab ära ka pinge ja voolukõverate vahelise nihke, sest vool tekkib ahelas ainult pinge olemasuolul.
|
Sujuvkäivitid võivad olla kas ühe või kolmefaasilised.
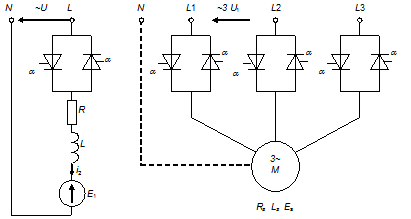
Ühefaasiline vahelduvpingeregulaator (vt. Joonis 6.31) koosneb kahest vastuparalleelselt ühendatud türistorist. Pinge väärtust muudetakse türistoride avamishetke reguleerimisega faasijuhtimise põhimõttel. Suletavate pooljuhtventiilide (nt transistoride) puhul saab sujuvkäiviti juhtimiseks kasutada ka pulsilaiusmodulatsiooni põhimõtet. Ühefaasilisi vahelduvpingeregulaatoreid kasutatakse laialdaselt kodumasinate ja tööriistade, nt elektritrellide, pesumasinate, tolmuimejate jms universaalmootoritega ajamite kiiruse reguleerimiseks. Samuti kasutatakse vahelduvpingeregulaatoreid valgustuse reguleerimiseks. Vahelduvpingeregulaatorite peamiseks rakenduseks võimsates ajamites on sujuvkäivitid [21].
Kolmefaasiline vahelduvpingeregulaator (vt. Joonis 2.30) koosneb kolmest ühefaasilisest regulaatorist. Kui koormuse keskpunkt on ühendatud neutraaljuhiga N, on kolmefaasilise pingeregulaatori reguleerimiskarakteristik identne ühefaasilise vaheldupingeregulaatori omaga. Kui ühendust neutraaljuhiga pole (tihti mootoritel seda ei olegi), peavad türistorid voolu tekitamiseks sisse lülituma paarikaupa, mis halvendab tunduvalt reguleerimisomadusi. Mõningaid kolmefaasilisi vahelduvpingeregulaatoreid juhitakse ainult kahe faasi muutmisega ning kolmas ühendatakse otse võrku. Sellisel juhul tuleb tähelepanu pöörata sellele, et sujuvkäiviti ühendamisel võib primaarpoole ühendamisel ka sekundaarpool, mis ei sisalda türistore, sattuda pinge alla.
|
Sujuvkäiviti ühendamine
Sujuvkäiviti ühendamiseks on kaks erinevat võimalust- In line, mis on kõige levinuim ühendamise viis, ja In Delta. Ainult mõned üksikud sujuvkävitid võimaldavad In Delta ühendamist. Vaatleme mõlemat ühendamise viisi nüüd lähemalt.
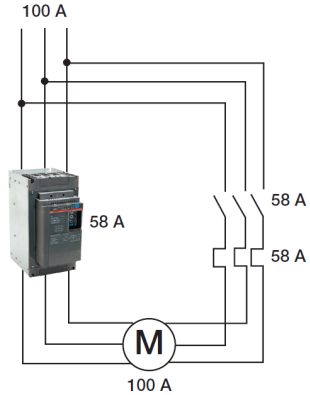
7. In Line ja In Delta
In line on kõige levinuim viis sujuvkäiviti ühendamiseks. 3 faasi on järjestikuliselt ühendatud liigkoormuskaitselülitiga, põhikontaktoriga ja teiste seadmetega. Sellise ühenduse puhul peab sujuvkäiviti olema valitud kooskõlas mootori andmetega. Näiteks vooluga 100 A töötav mootor nõuab 100 A sujuvkäivitit, 100 A kontaktorit.
In Delta ühendus võimaldab ühendada mootorit kolmnurka nii, et oleks võimalik asendada täht-kolmnurk käivitust. Kui sujuvkäiviti on ühendatud In Deltasse, siis on ta ekspluateeritud kõigest 58 % (1/√3) ulatuses oma täisvõimsusest. Sellepärast on võimalik mootorile valida väiksema võimsusega sujuvkäivitit ja ja sellega saavutada odavama lahenduse. Näiteks 100 A mootor nõuaks käivitamiseks 58 amprilist sujuvkäivitut, 58 amprilist kontaktorit. Sellise mootori ühendamisel peab olema tagatud ka kuue juhtmeline kaabel.
a |
b |

Asünkroonmootori käivitamine sujuvkäivitiga
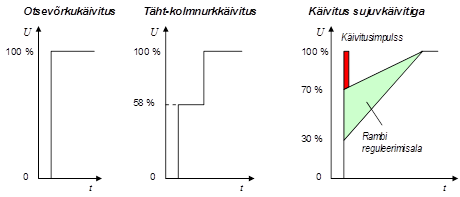
Mootori käivitamine on üks ülimalt tähtis protsess, kuna see kutsub esile mootori paigaltvõtu ja kiirendamise, mis omakorda kutsuvad esile suure momendi tekkimise ja suurema voolu tarbimist võrgust. Igat käivitusprotsessi iseloomustavad pinge voolu, või sageduse momendi diagrammid. Sujuvkäiviti puhul saab paindlikult valida sobiva käivitusrambi. Kui mootori käivitamine on raskendatud võib lahtimurdemomendi saavutamiseks rakendada ka hetkelist täispingega käivitusimpulssi. Lühisrootoriga asünkroonmootori normaalkäivitusel võib käivitusvool olla 3-4 korda suurem nimivoolust, raskel käivitusel 4-5 korda. Kui võrrelda käivitamist sujuvkäivitiga teiste käivitusviisidega nagu otsevõrkkäivitus ja täht-kolmnurkkäivitus, siis võib märgata, et sujuvkäiviti kiirendusramp on tõepoolest sujuvam (vt. Joonis 6.32). Kiirendusrambi kestus tuleb valida vastavalt koormusele, liiga suurele koormusele ei tohi määrata lühikese kestusega käivitusrampi, kuna see võib põhjustada ülekoormuskaitse rakendumise. Samuti ei saa väikesele koormusele programmeerida liiga pika kestusega käivitusrampi, kuna see võib põhjustada liigkoormuskaitse rakendumise.
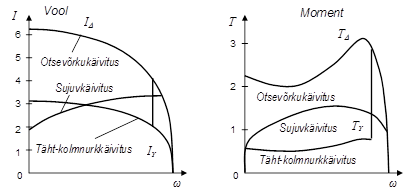
Voolu ja momendi muutumine asünkroonmootori erinevatel käivitusviisidel on näidatud Joonis 6.33. Nagu võib märgata, on sujuvkäiviti puhul käivitusvool väiksem ning moment muutud sujuvamalt.
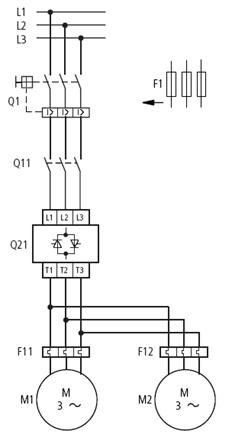
Ühe sujuvkäivitiga võib käivitada korraga ka mitu mootorit. Joonis 6.34 on näidatud sujuvkäiviti kasutamine kahe asünkroonmootori üheaegse käivitamise lülituses. Mõlemat mootorit toidetakse ühisest toitevõrgust läbi liigvoolu vabastiga kaitselüliti ja kontaktori kontaktide ning sujuvkäiviti. Mootorite liigkoormuskaitse on realiseeritud eraldi termoreleedega. Mootorite pidurdamiseks võib kasutada mootori vaba väljajooksu, pidurdamist rambiga, alalisvoolupidurdust ja dünaamilist pidurdust (vt. punkt 2.5.7.).
Toitevõrk
Liigvooluvabastiga kaitselüliti või sulavkaitsmed
Kontaktor
Sujuvkäiviti
Liigkoormuskaitse termoreleed
Mootorid |
|
Sujuvkäiviti kaitsefunktsioonid
Tänapäeval täidab sujuvkäivitite juhtimissüsteem mitmeid mootori ja käivitusseadme kaitsefunktsioone. Kaitsefunktsioonid kaitsevad nii mootorit, aga ka töömasinat, mida mootor käitab. Nendeks on näiteks:
- eelnevalt sätestatud maksimaalvoolupiirang;
- sisend- ja väljundfaasi katkestus,;
- türistoride lühis (mõned sujuvkäivitid võivad töötada ka lühistatud türistoriga;
- liigkuumenemine,;
- toitepinge väär sagedus;
- protsessori rike.
Mõnede sujuvkäivitite puhul lisanduvad loetletud kaitsefunktsioonidele veel voolu kaudset soojuslikku toimet ja mootori jahtumist arvestav liigkoormuskaitse, mootori liigkuumenemis- ehk termistorkaitse, seiskunud rootori, koormuse ootamatu kadumise, juhtseadme mäluvigade, pikaleveninud käivituse ja liiga kaua kestva väikekiirusel talitlusaja funktsioonid. Näiteks pumpade käivitusrambi sujuv juhtimine võimaldab vältida hüdraulilist lööki torustikes.
Sujuvkäiviti valik
Tavaliselt valitakse sujuvkäiviti mootori nimivõimsuse järgi. Mõningatel juhtudel tuleb valida suurema võimsusega saujuvkäiviti. Nendeks juhtudeks on kas rasked käivitustingimused või tihe käivitamine. [8].
Tabel 2.7 annab pisikese ülevaate sujuvkäiviti valikust.
Tabel 2.7. Sujuvkäiviti valikukriteeriumid
| Normaalne käivitus (normal start) |
Raske käivitus (Heavy duty start) |
|
|---|---|---|
Tüüpilised rakendusalad |
Kompressor, eskalaator, tsentrifugaalpump, lift. |
Pikk konveier, purusti, segisti, veski |
Valik |
Sujuvkäiviti valida vastavalt mootori nimiandmetele. |
Normaalse käivitusega sujuvkäiviti puhul valida üks suurus suurem sujuvkäiviti kui mootori nimivõimsus. Kui sujuvkäiviti on loodud raske käivituseks, siis valida sujuvkäiviti vastavalt mootori nimivõimsusele. |
Sujuvkäiviti rakendamise näide: tsentrifugaalventilaator
Vaatleme järgnevalt tsentrifugaalventilaatorit, mida käitab kolmefaasiline lühisroototiga asünkroonmootor (vt. Joonis 6.35).
Mõned masinad on loodud selliselt, et neid käivitatakse vähendatud käivitusmomendiga st koormusvabalt. Suuri tsentrifugaalventilaatoreid käivitatakse tihti kinnises keskkonnas, mis teeb käivituse lihtsamaks, kuid kuna ventilaatori inertsimoment on küllalt suur, siis võib käivitus kesta suhteliselt kaua.
Tsentrifugaalventilaatorid on tihti käitavad rihmadega. Otsevõrkkäivitusel kipuvad viimased aga libisema, mis on põhjustatud nende masinate suurest inertsimomendist (võrreldav hoorattaga), mida ei ole kerge paigalt nihutada. Rihmade libisemine on ebasoovitav nähtus, mis vajab suuri kulutusi hooldusele ja väljavahetamisele, samas kui tootmine seisab.
Täht-kolmnurk käivitusel on küll käivitusmoment väiksem, aga kuna ventilaatori puhul suureneb moment pöörlemiskõveraga ruutvõrdeliselt, ei saavuta mootor tähtühenduses vajalikku momenti, et mootorit piisavalt kiirendada. Ümberlülituse hetkel tekkib aga suur voolutõuge ja seega ka pinge ülekandes, mis on tihti võrreldavad otsevõrkkäivitusega. Libisevate rihmade puhul võib see aga tõsta veelgi kõrgemale. Ainus võimalus libisemise vältimiseks on rihmad rohkem pingule tõmmata.
Üheks võimalikuks viisiks vähendada käivitusmomenti on kasutada sujuvkäivitit mootori käivitamiseks. Õigesti valitud sujuvkäiviti puhul on pinge käivitamisel piisavalt madal, et vältida rihmade libisemist ja piisavalt kõrge, et ventilaator käivitada. Lisaks sellele võimaldab sujuvkäiviti käivitada masinat tühijooksul ja koormatult.
Sujuvkäiviti valikul tuleb lähtuda mootori nimiandmetest ja käivitusviisist. Normaalsel käivitusel tuleb sujuvkäiviti valida vastavalt mootori nimiandmetele, raskel käivitusel valida kas selleks ette nähtud sujuvkäiviti samade mootori parameetritega. Võib ka valida normaalse käivituse jaoks ette nähtud, aga üks klass kõrgemat, sujuvkäivitit. Soovitavad algparameetrid oleksid:
- Stardirambi kestus: 10 s.;
- Pidurdusrambi kestus: 0 s (pidurdamine vaba väljajooksuga);
- Algpinge: 30 % mootori nimipingest (vt. Joonis 6.21. Pinge-aja tunnusjooned erinevatel käivitusviisidel);
- Soovitav on kasutada ka voolupiirangut.
Sagedusmuunduriga elektriajam
Sagedusmuundur ja tema tööpõhimõte
Sagedusmuundur (frequency converter) on tänapäeval kasutatavates elektriajamites põhi-komponendiks kiiruse reguleerimiseks. Traditsiooniliselt oli sagedusmuundur ette nähtud mootori toitepinge ja sageduse sujuvaks reguleerimiseks. Tänapäeval kujutab sagedusmuundur terviklikku ajamiplokki, mis sisaldab toitemuundurit, andureid, juhtseadet ning võimaldab juhtida elektrimootorit ja tema poolt käitavat töömasinat. Samuti on võrguliidese abil ajamit rakendada keerukates automaatjuhtimissüsteemides.
Tänapäeval kasutatakse erinevat tüüpi sagedusmuundureid, kõige enamasti alalisvoolu vahelüliga muundurit.
Sagedusmuundur koosneb mittejuhitavast kolmefaasilisest alaldist, alalisvoolu vahelülist ning vaheldist.
Alaldi (rectifier) koosneb kuuest dioodist (iga faasi peale 2 dioodi) ning on ette nähtud vahelduvvoolu muutmiseks alalisvooluks. Alaldi väljundis on pulseeriv alalisvool pingega Uz, mis kolmefaasilise 400 V süsteemi puhul omab väärtust ![]() V.
V.
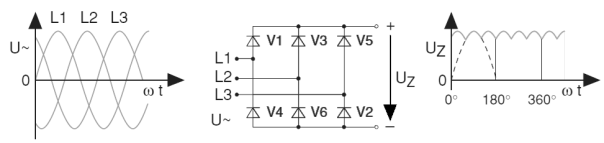
Alalisvoolu vahelüli (DC link) koosneb omakorda kondensaatorist, käivitus- ja pidurdusahelast. Alalisvoolu vahelülis silutakse alalisvoolu pulsatsioonid ära kondensaatori abil. Kui muundur lülitatakse võrku tekkib kondensaatori laadumise tõttu väga suur vooluimpulss, mistõttu on alalisvoolu vahelülisse sisse ehitatud türistoriga juhitav pidurdusahel. Takisti piirab voolu väärtust, kondensaatorid laaduvad aeglasemalt ning ohutult. Kui kondensaatorid on laetud viiakse türistor kinnisesse olekusse ning takisti lühistatakse. Pidurdusahelat kasutatakse dünaamilisel pidurdamisel, et ära hajutada pidurdamisel vabanevat soojusenergiat. Pidurdusahel on juhitav transistoriga. Sagedusmuunduri väljalülitamisel võib kondensaatorile jääda eluohtlik kõrgepinge veel kuni viieks minutiks, mistõttu tuleb olla eriti ettevaatlik äsja väljalülitatud seadmega.
Vaheldis (inverter) muundatakse alalisvool muutliku pinge ja sagedusega vahelduvvooluks. Vaheldi koosneb kuuest transistorist ja antiparalleelselt ühendatud dioodidega. Muundurit juhitakse transistoride juhtimisega kasutades selleks pulsilaiusmodulatsiooni põhimõtet. Muunduri väljund on ühendatud mootori klemmidega.

Sagedusjuhtimine
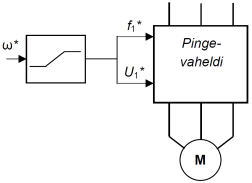
Üheks kõige levinumaks vahelduvvoolumootorite kiiruse reguleerimise viisidest on mootori sagedusjuhtimine (frequency control), kus mootori pinge antakse ette sageduse funktsioonina ![]() . Kõige lihtsamal juhul hoitakse pinge ja sageduse suhe konstantsena
. Kõige lihtsamal juhul hoitakse pinge ja sageduse suhe konstantsena ![]() . See suhe tuleneb asjaolust, et sageduse kasvades suurenevad ka kaod mootori mähistes, mistõttu tuleb sagedusega f suurendada ka pinget U. Asünkroonmootori pinge- sageduse juhtimise plokkskeem on toodud Joonis 6.39. Tärn (*) suuruste juures tähendab etteandesuurust.
. See suhe tuleneb asjaolust, et sageduse kasvades suurenevad ka kaod mootori mähistes, mistõttu tuleb sagedusega f suurendada ka pinget U. Asünkroonmootori pinge- sageduse juhtimise plokkskeem on toodud Joonis 6.39. Tärn (*) suuruste juures tähendab etteandesuurust.
Sagedusjuhtimist nimetatakse ka skalaarjuhtimiseks või avatud ahelaga juhtimiseks (Open loop control), kuna sellisel süsteemil puudub tagaside, mistõttu sagedusmuundur ei teagi, kui kiiresti mootor tegelikult pöörleb ja kas üldse pöörleb. Küll aga tagatakse vastavalt nimiandmetele mootori liigkoormuskaitse (tavaliselt 150% nimivoolust) voolutugevuse mõõtmisega ning vajaduse korral väljalülitamisega (7). Järsk koormuse muutus võib põhjustada mootori vääratumise st tööpunkti nihkumist väärtuspunkti (vt. Joonis 6.39). Selle tulemusena mootor seiskub või jääb pöörlema väikesel kiirusel, millega kaasneb mähiste temperatuuri tõus. Seetõttu on sagedusjuhtimisel (skalaarjuhtimisel) probleemiks koormusele vastava momendi tekitamine ning selleks sobiva pinge rakendamine mootorile [5]. Sageduse ja pinge reguleerimine sobib hästi valdavalt püsitalitluses töötavate mootorite puhul, kui sagedus ja pinge muutuvad suhteliselt aeglaselt [21].
Väikestel sagedustel hakkab mootori moment vähenema, sest üha suuremat tähtsust etendavad kaod mähise aktiivtakistusel.
Väljatugevuse vähenemine nimisagedusest suurematel sagedustel
Mootori sageduse suurenemisel üle nimisageduse peab mootori toitepinge jääma konstantseks. Sellisel juhul hakkab mootori vool ja järelikult ka magnetvälja tugevus vähenema ning mootor läheb üle vähendatud väljatugevusega režiimi (field weakening mode). Mootori poolt arendatav moment hakkab vähenema, kusjuures libistus ja võimsus jäävad muutumatuks. Välja nõrgenemisel väheneb moment pöördvõrdeliselt
![]()
ja suurim lubatud moment
![]()
väheneb see ruutkarakteristiku järgi ning selles režiimis väheneb ka mootori taluvus ülekoormusele, millega tuleb arvestada.
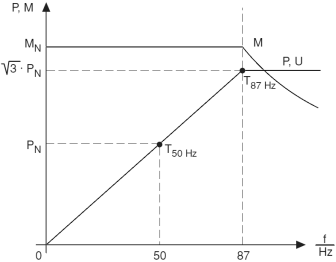
Konstantse momendi talitlus kuni 87 Hz sageduseni
Sagedusjuhtimisega ajami põhisagedust võib mõnel juhul suurendada ka kuni 87 Hz, kui mootori nimisagedus on 50 Hz. Sagedusmuundur peab seda funktsiooni võimaldama. Kui 50 Hz puhul toidetakse mootorit pingega 230 V, siis 87 Hz puhul teguri ![]() korda suurema pingega 400 V. See on võimalik ainult sellisel mootoril, mida võib kolmnurkühenduses toita pingega 400 V. Kui mootor staatorimähistega 230 / 400 V (Δ / Y). Mähised peavad olema sellise režiimi jaoks sobivad (8).
korda suurema pingega 400 V. See on võimalik ainult sellisel mootoril, mida võib kolmnurkühenduses toita pingega 400 V. Kui mootor staatorimähistega 230 / 400 V (Δ / Y). Mähised peavad olema sellise režiimi jaoks sobivad (8).
On oluline, et mootori pinge suureneb koos sagedusega ning nimipingest 230 V suurematel pingetel on pinge ja sageduse suhe konstantne (![]() ) ning sama väärtusega kui nimipingest allpool .
) ning sama väärtusega kui nimipingest allpool .
Enamike mootorisarjade puhul toodetakse suurema (üle 4 kW) võimsusega mootoreid ka suuremale toitepingele, nt 400 / 690 V. Nende masinate puhul pole võimalik rakendada põhisageduse suurenemist kuni 87 Hz. Seepärast tuleb jälgida, et suurendatud põhisagedusega ajamites kasutataks vaid 230 / 400 V nimipingega mootoreid.
Pinge ja sageduse võrdelisel suurendmisel 50 Hz kuni 87 Hz laieneb ka mootori konstantse momendiga tööpiirkond kuni 87 Hz ning mootori võimsus suureneb seejuures nimivõimsusega võrreldes kuni ![]() korda. Pöörlemiskiiruse suurenemisel üle 87 Hz läheb ajam üle nõrgendatud väljatugevusega režiimi. Optimaalselt talitleva sagedusmuunduri korral, eriti kui töötatakse täispingel ja siinuselise vooluga, võib seda lubada ka lühiajalise ülekoormuse (short- time duty) puhul. Pöörlemiskiiruse suurenemisel paraneb ka mootori jahutus, mistõttu on püsitalitluses (S1, vt punkti 2.3.6.) lubatud võimsus kuni 35 % võrra suurem, mis tähendab, et võib kasutada väiksema suurusastmega mootorit. Näiteks lubatakse mootorile võimsusega 3 kW kolmnurklülituses püsitalitluses sageduse 87 Hz puhul võimsust 4 kW (8).
korda. Pöörlemiskiiruse suurenemisel üle 87 Hz läheb ajam üle nõrgendatud väljatugevusega režiimi. Optimaalselt talitleva sagedusmuunduri korral, eriti kui töötatakse täispingel ja siinuselise vooluga, võib seda lubada ka lühiajalise ülekoormuse (short- time duty) puhul. Pöörlemiskiiruse suurenemisel paraneb ka mootori jahutus, mistõttu on püsitalitluses (S1, vt punkti 2.3.6.) lubatud võimsus kuni 35 % võrra suurem, mis tähendab, et võib kasutada väiksema suurusastmega mootorit. Näiteks lubatakse mootorile võimsusega 3 kW kolmnurklülituses püsitalitluses sageduse 87 Hz puhul võimsust 4 kW (8).
Pulsilaiusmodulatsioon
Pulsilaiusmodulatsioon (PWM – Pulse Width Modulation) ühendab endas väljundi pinge ja sageduse juhtimist ning on tänapäeval rohkesti kasutatud vaheldite juhtimiseks. Pulsilaiusmodulatsiooni väljundiks on konstantse amplituudiga elektriliste impulsside jada, kus vajaliku kujuga signaali saamiseks muudetakse impulsside kestust (laiust) konstantse perioodi korral. Kaasaegsetes muundurites ulatub pulsilaiusmodulatsiooni sagedus mõnedest kilohertsidest (1 kHz = 103 Hz) mootorite juhtimisea kuni megahertsidesse (1 MHz = 106 Hz) mõningates muundurites. Pulsi laiusega reguleeritakse mõjuva pinge efektiivväärtust (vt. Joonis 6.42).
Suhteline lülituskestus leitakse
![]()
Pinge efektiivväärtus ühe perioodi jooksul arvutatakse
![]()
Siit järeldub, et mida pikem on lülituskestus (mida laiem on pulss), seda suurem on pinge efektiivväärtus perioodi jooksul.
Sagedusmuunduri alalisvoolu vahelüli pinge pole sageli juhitav. Pulsilaiusmodulatsiooni kasutamisel on võimalik saada transistoride lülitamise abil reguleeritavat väljundpinget. Eksisteerib mitu erinevat pulsilaiusmodulatsiooni liiki, kuna tänapäeval on kõige tihedamini kasutatav siinuseline pulsilaiusmodulatsioon, siis vaatleme seda modulatsiooni tüüpi lähemalt.
Siinuselise pulsilaiusmodulatsiooni eesmärgiks on sellise pinge formeerimine, mis oleks võimalikult lähedane ideaalse siinusega. PWM-i genereeritakse juhtsignaalide kandevsageduse kolmnurkpinge võrdlemisel siinussignaaliga, nagu on näidatud joonisel x,a. Signaalid võrreldakse elektroonikas kasutatavas elemendis- komparaatoris. Ajahetkel, mil siinuspinge hetkväärtus on suurem, kui kolmnurksignaali hetkväärtus, on transistor avatud (transistori baasile on rakendatud pinge Us, ning sellel hetkel jookseb mootorist läbi elektrivool.
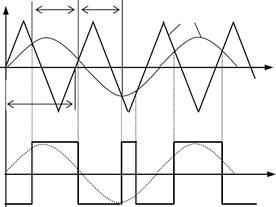
Pulsilaiusmodulatsiooni kasutatakse kolmefaasilise vahelduvpinge tekitamiseks. Selle tarvis on ühe siinusseade signaali asemel kasutatud kolm. Mida kõrgem on kandevsignaali (kolmnurksignaali) sagedus, seda rohkem sarnaneb väljundis siinuspinge ideaalsele sinusoidile. Seadesignaali (siinussignaali) sageduse reguleerimisega reguleeritakse väljundpinge sagedus. Sellise moodusega juhitakse asünkroon- ja sünkroonmootoreid.
Pulsilaiusmodulatsiooni põhimõtet kasutatakse ka alalisvoolumootorite juhtimiseks. Sellisel juhul genereeritakse pulsi laiust muutes muutuva efektiivväärtusega alalispinge.
Mootori momendi vahetu juhtimine
Mootori momendi vahetu juhtimise (DTC, direct torque control) meetod juhib otseselt staatori voogu Φ ja momenti M ning ei vaja sisemisi vooluregulaatoreid ega pulsilaiusmodulatsiooni. Selle mooduse korral juhitakse vaheldi lüliteid vahetult mootori pinge ja voolu mõõtmise kvalitatiivse seaduse alusel. Staatori magnetvoog tuletatakse staatori pingest, momenti on aga magnetvoo ja mootori voolu produkt. Välja arvutatud voog ja moment võrreldakse nende etteandesuurustega ning juhul kui need erinevad lubatud tolerantsi võrra, siis vaheldi transistore juhitakse selliselt, et viia voog ja moment võimalikult kiiresti lubatud vahemikku [23].
Momendi vahetu juhtimise korral on kolmefaasilise asünkroonmootori juhtimine on avatud ahelaga juhtimine, mis sarnaneb alalisvoolu juhtimisele. Pulsilaiusmodulatsiooniga juhitavates ajamites juhitakse pinget ja sagedust, mis enne genereerimist läbivad paljusid matemaatilisi plokke kontrolleris. Kuna DTC puhul juhitakse otse mootorit momenti ja magnetvälja, mis ise sõltuvad mootori parameetritest, siis ei vaja selline süsteem lisaks pulsilaiusmodulatsiooniga töötavat modulaatorit. Lisaks sellele võimaldab selline moodus juhtida momenti ilma tagasisideanduriteta.
Üheks suureks eeliseks on võimalus juhtida mootorit väga väikestel sagedustel (alla 0,5 Hz) arendades samal ajal nimimomenti (ettevaatust mootori jahutus!). Ilma tagasisideta ajamites on pöörlemiskiiruse täpsus tavaliselt 10% mootori nimilibistusest, mis rahuldab 95 % tööstuses kasutatavate tööde nõudmisi. Momendi juhtimise puhul reageerib süsteem muutustele 1-2 ms jooksul, samas kui PWMiga juhitavate ajamite puhul on see 100 ms. Momendi juhtimisel on tagatud ka momendi lineaarsus, mis on eriti oluline täpsetes töödes, nagu paberikerimisrullides (paper winders).
Üheks piiranguks on DTC meetodi kasutamine mitme mootori paralleelsel juhtimisel. Sellisel juhul ei ole juhtseadmel infot iga üksiku mootori oleku kohta, sellisel juhul on mõistlikum kasutada sagedusjuhtimist.
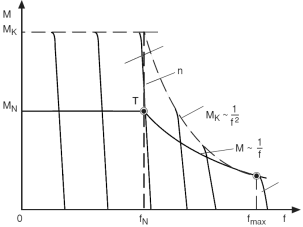
Mootori koormused ja nende tunnusjooned
Selleks, et valida töömasina jaoks optimaalne mootor peab tundma erinevate koormuste karakteristikuid. Mootori sobitamisel koormusega peab jälgima, et mootori käivitusmoment oleks töömasina käivitusmomendist suurem. Samuti ei tohi töömasin põhjustada rootori seiskumist ülekoormuse tõttu.
Momendi tunnusjoone järgi jaotatakse koormused neljaks kategooriaks:
- konstantse koormusega,
- pöörlemiskiirusega võrdeliselt kasvava koormusega,
- pöörlemiskiirusega ruutsõltuvalt kasvava koormusega,
- konstantse võimsusega töövahemikus.
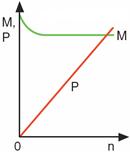
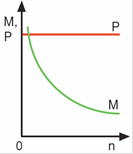
Loetletud koormuste näited, momendi M ja võimsuse P sõltuvused pöörlemiskiirusest n ja nende mehaanilised tunnusjooned on ära toodud Tabel 2''.5.
Tabel 6.5. Erinevad koormuskarakteristikud [25]
tõstuk (hoist), konveier (conveyor), robot (robot). |
valts (rolling mill), veski (mill), triikimisrull (calander). |
pump (pump), ventilaator (fan), tsentrifuug (centrifuge). |
puur (borer), kerija (winder), press (press). |
M = const |
M ~ n |
M ~ n2 |
M ~ n-1 |
P ~ n |
P ~ n2 |
P ~ n3 |
P = const |
|
|
|
|
|
|
|
|


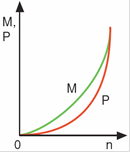
Konstantse koormuse puhul ei sõltu koormusmoment pöörlemiskiirusest (M = const). Sellisteks koormusteks on tõstemehhanismid, konveierid ja robotid, mis nõuavad kõrget lahtimurdmismomenti (moment paigalt nihutamiseks). Seepärast peab ka mootor ja mootorit juhtiv sagedusmuundur olema võimelised taluma lühiajalisi ülekoormuseid. Juhul, kui suure koormusmomendiga seadmed töötavad püsivalt madalatel kiirustel, siis tekkib oht mootori ülekuumenemiseks ning jahutamiseks tuleb kasutada välist jahutust. Kriitilise temperatuurini kuumenemist, mille puhul mähiste isolatsioon võib sulada, aitab vältida mootorisse sisseehitatud temperatuuriandur (termistor).
Lineaarselt kasvava koormusmomendiga koormusteks võivad olla valtsid, veskid, paber-pressid. Nende puhul esineb lahtimurdemoment harva ning on tavaliselt väike. Võimsus kasvab ruutvõrdeliselt pöörlemiskiirusega st. et kahekordsel nimikiirusel tarbitakse 4 korda suuremat võimsust.
Ruutvõrdeliselt kasvava koormusmomendiga on ventilaatorid, pumbad ja tsentrifuugid st seadmed, kus määravaks on õhu või vedeliku takistus. Lahtimurdemoment esineb neis väga harva ning on tavaliselt väike. Tihtipeale töötavad need seadmed kiiretel pööretel, mistõttu on tagatud hea jahutus. Võimsus muutub aga pöörlemiskiirusega kuupvõrdeliselt. Kui langetada ventilaatori pöörlemiskiirust 100 protsendilt 90 protsendile, siis väheneb tarbitav võimsus 0,93·Pn, ehk ligikaudu 70 % peale.
Konstantse võimsusega on puurid, freesid, mähkimismasinad jt. Nad töötavad konstantsel kiirusel ning moment on väike, kuna neid tavaliselt koormatakse hetkel, mil masin on saavutanud oma nimikiiruse. Moment on pöördvõrdeline pöörlemiskiirusega.
Tavaliselt esinevad praktikas segakarakteristikud ning kõrvalekalded ideaalsetest tunnusjoontest.
Sagedusmuunduri funktsioonid
Ajami käivitamine ja peatamine
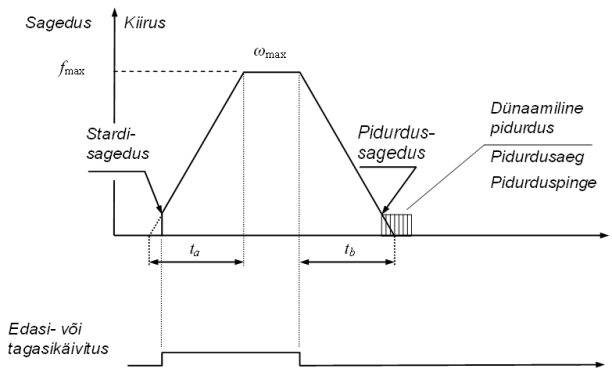
Käivitusmeetodi valikul määratakse juhtimiseks kasutatavate juhtlülitite tüüp ja otstarve. Kiirendus- ja aeglustusrampide kestused töökiirusele käivitamisel ja pidurdamisel on sätestatavad laias vahemikus sekundikümnendikest kuni kümnete minutiteni. Käivituse alghetkel rakendatavat sageduse väärtust nimetatakse stardi- ehk käivitussageduseks.
Ajami peatumine võib toimuda kas vaba väljajooksu või aeglustusrambiga. Aeglustusrambi puhul aeglustatakse mootori kiirust sageduse vähendamisega kuni pidurdussageduseni ja rakendatakse seejärel dünaamilist pidurdust. Pidurdussageduseks loetakse sagedust, millest allpool rakendatakse mootori dünaamilist pidurdust. Pidurduseks kasutatava alalispinge vaikeväärtus sõltub muunduri võimsusest ja on tavaliselt sätitav vahemikus 1…20%, kusjuures muunduri suurema võimsuse puhul valitakse väiksem pinge. Samuti saab valida dünaamilise pidurduse kestuse [21].
|
Käivitamise ja pidurdamise rambid peavad olema valitud sobivalt mootori andmetega. Näiteks ei saa valida kiiret käivitust suure inertsimomendiga mootorile, kuna sellisel juhul oleks vaja arendada ajamil väga suurt momenti ja ka võimsust. See võib põhjustada muundurisse sisseehitatud kaitsete rakendumise ja mootori seiskumise. Kui mootorit peatatakse vaba väljajooksuga, siis tuleb enne mootori taaskäivitamist oodata, kuni mootor on seisma jäänud, vastasel korral võib rakenduda sagedusmuundur [21].
Libistuse kompensatsioon
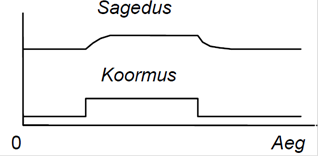
Libistuse kompensatsioon (slip compensation) võimaldab parandada ajami dünaamilisi omadusi. Seda moodust kasutatakse suure jõudlusega asünkroonajamites, kus peamiseks eesmärgiks on kiiruse reguleerimine. Libistuse kompenseerimisel hoitakse mootori kiirus koormuse suurenemisel tema toitepinge sageduse suurendamisega konstantne. Libistuse kompenseerimine ei anna tulemust anduriteta süsteemides. Tavaliselt valitakse kompensatsiooni vahemikuks 0...5 %. Ülekompenseerimisel tekkib oht, et mootori töö muutub ebastabiilseks [21].
|
IR kompensatsioon
IR kompensatsiooni kasutatakse staatoris tekkiva aktiivpingelangu ΔU kompenseerimiseks (vt. Joonis 2.26). IR kompensatsioon aitab tagada vajaliku magnetvoo tugevuse ning sellega mootori parema käivituse. Nagu on näha, ei alustata pinge- sageduse juhtimise puhul pinget suurendama nullist, vaid teatud pinge väärtusest ΔU = IR, mida kasutaja võib sättida 0...20 % piires.
|
Tabelis 6.2 on toodud firma ABB poolt soovituslikud IR kompensatsiooni väärtused 400 V pöörlevatele mootoritele kasutades sagedusmuundurit ACS400.
Tabel 6.6. Soovituslikud IR kompensatsiooni väärtused 400V pöörlevatele masinatele
| Võimsus [kW] |
3 |
7,5 |
15 |
22 |
37 |
|---|---|---|---|---|---|
| IR komp. [V] |
21 |
18 |
15 |
12 |
10 |
Mootori momendikompensatsioon
Momendikompensatsiooni puhul võib sagedusmuundur sõltuvalt koormuse tüübist valida ka erineva kujuga kiirendusrambi. Kui koormus on pöörlemiskiirusega võrdeline, siis kasutatakse lineaarset rampi, samas kui koormus on pöörlemiskiirusega ruutvõrdeline, kasutatakse parabooli kujulist rampi.
Mootori pöördemomendi automaatkompensatsiooni puhul vähendab sagedusmuundur mootori koormuse vähenemisel automaatselt tema toitepinget. Kompensatsiooni parameeterid sätitakse nimivoolu juures vahemikus 0…20 % nimipingest (tavaliselt 3…5 %). Kompensatsiooni liiga suure väärtuse puhul võib ajam minna mittestabiilseks ja rakenduda liigvoolukaitse.
a |
b |
Elektriajami mikroprotsessorjuhtimine
Elektriajam on elektrienergial põhinev (elektrimasinast, toitemuundurist ja juhtseadmetest koosnev) süsteem liikumise tekitamiseks ja juhtimiseks. Liikumise juhtimine (motion control) on elektriajami põhifunktsioon.
Ühe- ja mitmekoordinaadilised ajamid. Töömasina või mehhanismi liikumise juhtimine tähendab ühe- või mitmemassilise süsteemi asendi, kiiruse või kiirenduse juhtimist vastavalt soovitud liikumisdiagrammile (asendi, kiiruse ja kiirenduse muutumisele ajas).
Ajamite puhul juhitakse:
- mehhanismi momenti, jõudu, või kiirendust;
- kiirust;
- asendit või positsiooni.
- konstantne, (stabiliseerimissüsteem);
- muutuda programmi järgi (reguleerimissüsteem);
- muutuda juhuslikult (järgivsüsteem).
- Väljundi vea järgi juhitavateks süsteemideks:
- Mudeli järgi juhitavateks süsteemideks:
- Intellektuaalseteks süsteemideks (hägusloogilised inimese intuitsioonil ja tehisnärvivõrgul põhinevad süsteemid).
- Pidevatoimelisteks (analoogsüsteemid);
- Arvjuhtimissüsteemideks (digitaalsüsteemid);
- Binaarseteks süsteemideks (binaarloogikasüsteemid).
Enamikku nüüdisaegseid ajameid juhitakse mikroprotsessor-juhtseadmetega, mille funktsioonid realiseeritakse vastavate programmidega ehk tarkvaraliselt.
Allikas:
http://www.thistutorial.com/wp-content/uploads/2011/02/arduino-atmega-programming-600x450.jpg
Nüüdisaegsed elektriajamite juhtimissüsteemid teostatakse mikroprotsessoritega (joonis 6.68). Selleks kasutatakse mikrokontrollereid, universaalprotsessoreid ja keerukamates süsteemides nagu vektorjuhtimise kasutamise korral ka signaaliprotsessoreid või rakendusotstarbelisi eriprotsessoreid. Toodetakse ka ajamikontrolleri kiipe. Üldjuhul on programmeeritavad loogikakontrollerid muundurite juhtimiseks liiga aeglased, kuid on ka erandeid. Järgnevalt vaatleme lähemalt muundurite juhtimiseks sobivaid mikrokontrollereid.
Mikrokontroller on ühes integraalskeemis teostatud mikroarvuti, mida kasutatakse keerulistes juhtseadmetes suure hulga digitaal- ja analoogandmete reaalajatöötluseks (digitaalseks signaalitöötluseks). Mikrokontrolleri tööks on vaja vähe lisaseadmeid, neid on lihtne kasutada ja seetõttu on nad väga perspektiivikad. Mikrokontrolleri programmi algkood kirjutatakse tavaliselt C-keeles. Programmi töödeldakse eelprotsessoriga, lingitakse, assembleeritakse ja kompileeritakse kuueteistkümnend koodiks, mis muudetakse binaarkoodiks ja programmeeritakse EPROMi.
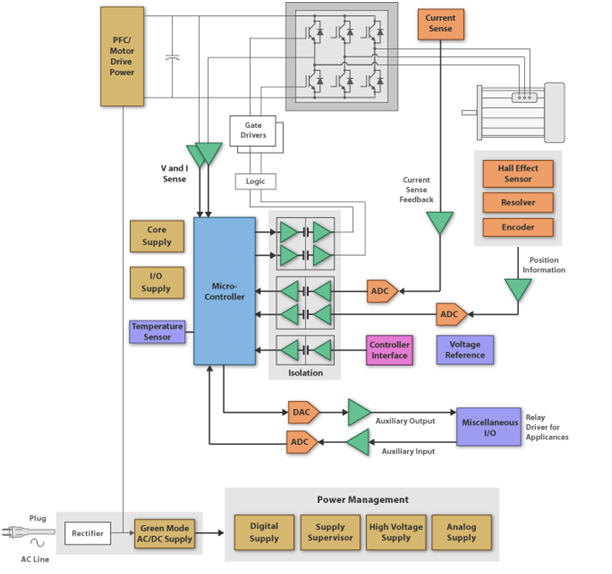
Allikas: http://focus.ti.com/docs/solution/folders/print/195.html
Servoajam
Servoajami ehitus ja tööpõhimõte
Servoajam koosneb servomootorist ja servovõimendist (Joonis 6.70 ja Joonis 6.71). Servovõimendi (ka servokontrolleri või servomuunduri) peamine ülesanne on mootori toitevoolude reguleerimine. Sõna „servo” tuleneb ladinakeelsest sõnast „servus”, mis tähendab teenijat, orja või abimeest. Tööpinkides on servoajamid kasutusel peamiselt abiajamitena.
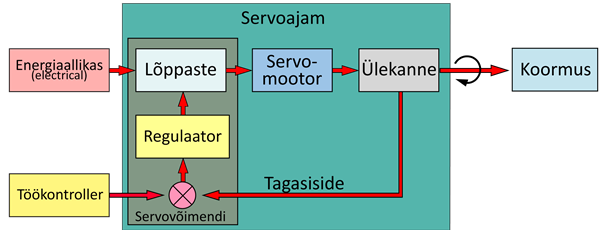

Servovõimendi ehk servomuundur reguleerib etteantud momendi ja kiiruse saavutamiseks mootori mähistesse antavat voolu. Servovõimendi koosneb põhiosadena lõppastmest ja regulaatorist.
Regulaator tüürib lõppastet ja tagab etteande- ja tegelike suuruste (vool, asend, kiirus) pideva võrdlemisega mootori täpse töö ka muutuva koormuse tingimustes.
Lõppaste kujutab endast jõuelektroonikal põhinevat modulaatorit, mis formeerib servomootori toitevoolud tagamaks täituri ettenähtud liikumistrajektoori.
Erinevalt tavalistest elektriajamitest, mis töötavad enamasti püsikiirusel, on servoajami talitlus reeglina ebaühtlane. Nimikiiruseni kiirendamine kestab tihti ainult mõne millisekundi, millele järgneb lühikese aja pärast sama kiire pidurdus; seejuures peab positsioneerimistäpsus olema sajandikmillimeetri suurusjärgus.
Servoajamitele esitatakse paljudel juhtudel alljärgnevalt loetletud nõudeid:
1) suur positsioonimistäpsus;
2) suur kiiruse reguleerimistäpsus;
3) suur reguleerimispiirkond;
4) momendi stabiilsus;
5) küllaldane ülekoormatavus;
6) suur toimekiirus.
Servoajami eelised ülejäänud reguleeritavate ajamite ees on head dünaamilised näitajad, suur täpsus ja nullkiirusmoment (suur moment nullilähedastel kiirusel) ning kompaktne ehitusviis suure erivõimsuse juures. Ajami dünaamiliste omaduste all mõistetakse tema toimekiirust, mille suurenemisel kasvab ka töömasinate kiirus, töötsüklite arv ja lõpptulemusena masinate tootlikkus.
Ajami nõutav täpsus on sageli määratud töömasinaga, mille käitamiseks ajamit kasutatakse. Moodne suure toimekiirusega ajam peab rahuldama erinevate töömasinate omadustega määratletud nõudeid.
Servoajamid on suure täpsuse ja toimekiirusega ning laias kiirusvahemikus töötavad ajamisüsteemid, mis täidavad oma funktsioone ka ajutiste ülekoormuste puhul.
Servoajamite mootorid
Servomootorid on elektrimootorid, mille konstrueerimisel on prioriteediks võetud dünaamika, st kiire käivitus ja pidurdus. Servomootoreid valmistatakse nii vahelduvvoolule (sünkroon- ja asünkroonmootorid) kui ka alalisvoolule (harjadega ja harjavabad).
Püsimagnetergutusega sünkroonmootor rahuldab tänapäeval kõige paremini servoajami mootoritele esitatavaid nõudeid. Suur erivõimsus saavutatakse püsimagnetite nagu neodüüm-raud-boor (NdFeB), samaarium-koobalt (SmCo) ja ferriitmaterjalide kasutamisega. Vähesemal määral esineb ka asünkroon-servomootoreid. Servomootoriga komplektis tarnitakse ka asendiandur, mis edastab regulaatorile asendi- ja kiiruseteavet (Joonis 6.72). Mootoriga ühisesse korpusesse võib olla integreeritud ka mehaaniline pidur, mis väldib võlli nihkumist väliste jõudude toimel toite puudumisel.
Püsimagnetergutusega sünkroonmootoriga on konstruktsioonilt sarnane, kuid juhtimisviisilt erinev harjavaba ehk elektronkommutaatoriga alalisvoolumootor.

Sünkroonmootorid
Sünkroonmootorid on mitmefaasilised mootorid, milles staatori ja rootori magnetväljad pöörlevad sünkroonselt. Pöörlev magnetväli tekitatakse staatorimähiste sobiva ruumilise paigutusega ning nende voolude ajalise järgnevusega. Magnetvälja pöörlemiskiirus nd arvutatakse valemiga
![]() ,
,
kus f on toitepinge sagedus ja p staatori pooluspaaride arv.
Sünkroonmootori, nagu ka asünkroonmootori staator koosneb kerest, lamineeritud magnetahelast ja staatorimähisest. Rootor koosneb võllist, lamineeritud magnetahelast ning selle külge kinnitatud püsimagnetitest. Dünaamiliste omaduste parandamiseks on mootori magnetahel perforeeritud. Sellega vähendatakse rootori inertsimomenti ning suurendatakse vastavalt mootori toimekiirust käivitamisel.
Kui sünkroonmootorit toidetakse pingega, mille sagedus on konstantne, siis on tema rootori pöörlemiskiirus võrdne magnetvälja pöörlemiskiirusega. Mootori koormamisel hilistub rootori pöördväli staatori pöördvälja suhtes ning rootori poolused on staatori pöördvälja pooluste suhtes teatud koormusnurga a all. Mida suurem on rootori hilistumine staatori suhtes, seda suurem on mootori poolt arendatav moment. Kui nurk on 90°, siis on rootori poolused kahe staatori pooluse vahel ning mootori poolt arendatav moment on maksimaalne. Rootori magnetvälja edasise hilistumise korral, st kui mootor on liigkoormatud, hakkab mootori moment uuesti vähenema ning mootor on mittestabiilses talitluses, st mootor võib vääratuda ja jääda seisma (Joonis 6.73).
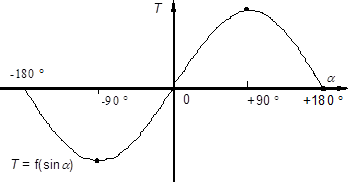
Servomootori kiiruse-momendi tunnusjoontel on näha kolm erinevat piirangut, mida ajami projekteerimisel tuleb arvestada (Joonis 6.74).
1. Mootori maksimaalne moment on peale muude suuruste piiratud ka püsimagnetite magnetvooga. Kui mootor on tugevasti koormatud ning staatori vool suureneb üle lubatud piiri, siis magnetid demagnetiseeruvad ning mootoris tekib momendikadu. Mootori ja toitemuunduri õige valiku korral pole vaja demagnetiseerumist karta.
2. Mootori moment on suurematel kiirustel piiratud mootori maksimaalse klemmipingega. Klemmipinge sõltub omakorda lõppastme pingest ja pingelangust kaablis. Pöörlemisel tekkiva vastuelektromotoorjõu (mootoris indutseeritud pinge) tõttu ei saa mootor suuremal kiirusel arendada suuremat momenti. Seepärast, kiiruse suurenemisel vastuelektromotoorjõud suureneb, mootori vool ja moment aga vähenevad.
3. Mootori moment on piiratud ka soojusliku koormusega. Ajami keskmine koormusmoment arvutatakse välja selle projekteerimisel. Arvutuslik moment peab olema väiksem kui masina poolt nullkiirusel arendatav moment T0. Lubatud soojusliku koormuse (temperatuuri) piirväärtuse ületamine põhjustab magnetahela demagnetiseerumist või mähiste isolatsioonirikkeid.
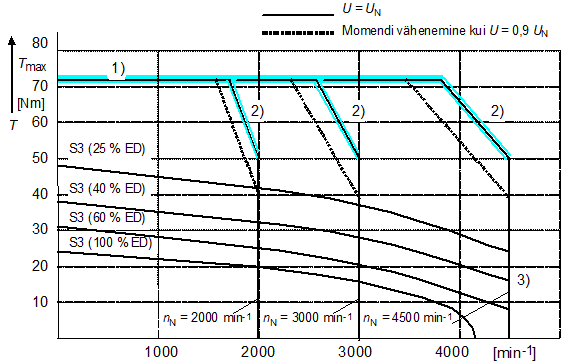 |
Harjavabad alalisvoolumootorid
Harjavaba alalisvoolumootor sarnaneb konstruktsioonilt püsimagnetergutusega sünkroonmootorile. Staatorimähised on analoogsed mitmefaasilise vahelduvoolumasina omadega ja rootor koosneb ühest või mitmest püsimagnet-pooluspaarist. Erinevalt harjadega masinast ei hoita koormusnurka 90° juures mitte mehaanilise kommutaatori, vaid lõppastme pooljuhtlülitite täpse kommuteerimisega. Lõppastme lülitite õigeks kommuteerimiseks on vaja teada rootori asendit, mis määratakse kas Halli elemendi või optiliste andurite abil. Elektrooniline kommutaator on osaks servovõimendi lõppastmest. (Joonis 6.75)
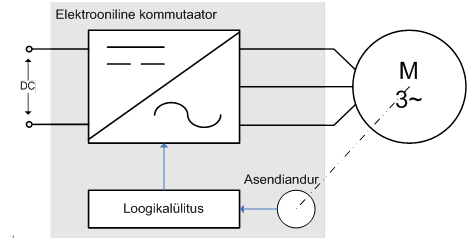
Servoajamite juhtimine ja tagasiside
Servovõimendid
Servovõimendi (teised nimetused ka servokontroller või servomuundur) reguleerib etteantud liikumisparameetrite (moment, asend) väärtuste saavutamiseks mootori mähistesse antavat voolu.
Kompaktsete servovõimendite (Joonis 2.49) eeliseks on nende väikesed mõõtmed ja mass ning terviklik ehitus. Nende puhul pole vaja teha lisaühendusi üksikute komponentide vahel nagu moodulehitusega kontrollerite puhul.
Moodulehitusega numbrilistel servovõimenditel on üks toitemoodul ja mitu koordinaat-servomoodulit (Joonis 6.76). Nende eelised avalduvad mitmekoordinaadiliste servoajamite puhul. Sel juhul toidetakse mitut koordinaat-servomoodulit ühisest toitemoodulist. Toitemooduli võimsus määratakse üksikute koordinaat-servomoodulite summaarse võimsuse ja nende kasutusteguri järgi. Taolise moodulehitusega servoajami koosseisu võivad kuuluda ka pidurdus- ja energiatagastusahelad. Mitmekoordinaadilise servoajami eeliseks on ka see, et ühisel alalisvoolulülil paiknedes võib pidurdustalitluses toimiv koordinaatmoodul suunata vabanenud energia mootoritalitluses moodulisse, säästes sellega võrgust tarbitavat energiat.
Servoajam saab oma seadesuurused täituri talitlust vahetult juhtivast töö juhtimisprogrammist. Viimane võib olla laaditud ka servovõimendi sisemällu. Servoajami seadesuurused kujutavad endast täituri liikumise ajadiagrammi, st asendi, kiiruse ja mõnel juhul ka momendi muutumist ajas. Liikumistrajektoor allub mitmesugustele riistvaralistele piirangutele, mistõttu tuleb see enne ajamisse etteandmist n-ö konditsioneerida. Näiteks täituri asend ei tohi ületada teatud piirasendeid, samuti on konstruktsiooniliselt piiratud mootori maksimumkiirus ja -kiirendus (Joonis 6.77).
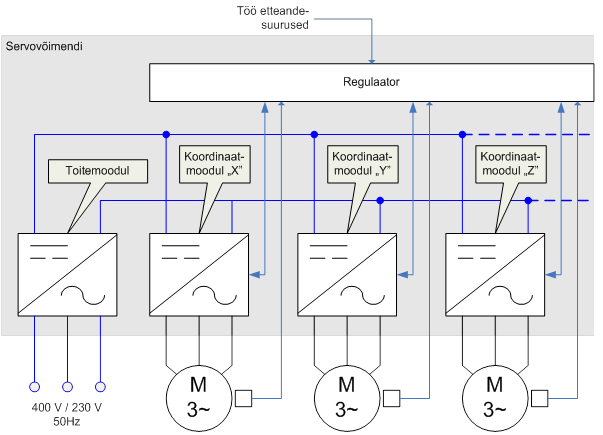
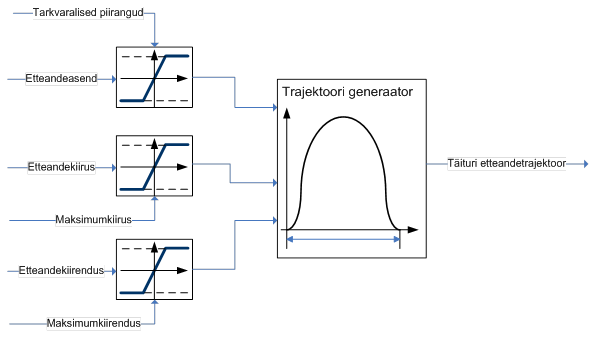
Tagasiside
Servomootorid komplekteeritakse standardselt resolveritega, mis määravad võlli absoluutasendi ühe pöörde ehk 360° ulatuses. Numbriliste servovõimenditega ühilduvad ka sincos-andurid (ühe- või mitmepöördelised absoluutväärtuse andurid) ja inkrementaalandurid ehk enkoodrid, mis tagavad eriti suure täpsuse ja dünaamika.
Resolver töötab pöördtrafo (Joonis 6.78), mille moodustavad rootoril ja staatoril paiknevad mähised, põhimõttel. Staatori kaks mähist on teineteise suhtes 90° võrra nihutatud ja nende siinuselisi väljundpingeid ud ja uq kasutatakse rootori kiiruse ning asendi juurdekasvusignaali määramiseks. Kontaktivabaks signaaliedastuseks on resolveri staatoril ja rootoril on ka lisamähised.
Ehitus |
Valemid |
Signaalid |
|
|
|
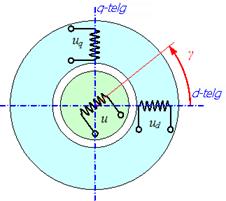
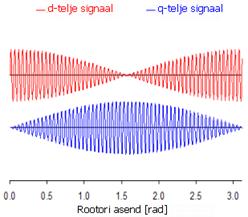
Inkrementaalanduri nelja väljundkanali signaale (Joonis 6.79) kasutatakse ajamite täpseks positsioneerimiseks. Väljunditeks on signaalid A ja B ning inverteeritud signaalid A ja B. Inkrementaalandur ehk enkooder väljastab kindla arvu impulsse ühe pöörde kohta, kusjuures signaalid A ja B on ajas 90° võrra nihutatud. Mootor pöörleb päripäeva, kui A kanali impulsside positiivsed frondid (esifrondid) edestavad B kanali impulsside esifronte ning vastupidi. Kuna inkrementaalandurid ei tuvasta mitte võlli absoluutasendit, vaid selle juurdekasvu, siis absoluutasendi määramiseks on vaja esmalt määratleda baaspunkt, millest algab liikumise arvutamine. Baaspunktiks võib olla ka eraldi koodirajal paiknev indeks.
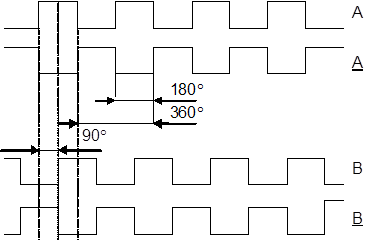 |
Inkrementaalandur koosneb valgusallikast ja läbipaistmatust koodikettast, millesse on perforeeritud koodirada. Fototajur püüab kinni läbi perforatsiooni tunginud valguse ja väljastab siinuseliselt muutuva signaali, mis muundatakse nelinurkimpulsside jadaks (Joonis 6.80) kiirus on määratud enkoodri väljundimpulsside sagedusega (Joonis 6.81).
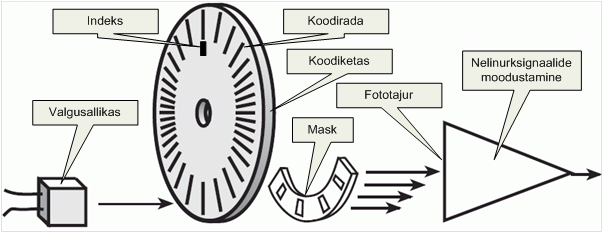
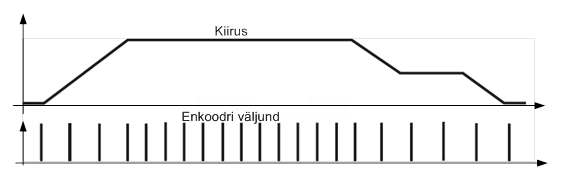
Servoajamite rakendamise näited
Positsioneerimine on servoajami klassikaline ülesanne. Sekundi murdosa jooksul peab ajam saavutama nimikiiruse ja lühikese aja möödudes sama kiiresti pidurdama, et jõuda sajandikmillimeetri täpsusega etteantud positsioonile.
Kiiruse reguleerimisega tagatakse ajami ühtlane töö. Kiirendus ja pidurdus antakse ette vastavate kõverate ehk rampidega. Juhtarvuti alamprogrammid võimaldavad kasutada tootmisprotsessi käigus mitut kiirusekõverat vastavalt protsessi etapile.
Spindli positsioneerimiseks tuleb mootor hetkeks peatada ja viia telg tööriista või tooriku vahetamiseks ettenähtud asendisse.
Telgede sünkroniseerimine on vajalik rakendustes, kus ühe koordinaadi liikumine sõltub teisest.
Elektrooniline ekstsentrik leiab kasutust muutuva ülekandeteguriga mehhanismides, asendades varem kasutatud mehaanilist lahendust peavõllil paikneva ekstsentriku ja järgiva teljega.
Lendsaag on funktsioon, mida kasutatakse liikuva materjali (nt konveieril) töötlemisel: lõikamisel, trükkimisel, keevitamisel jne. Töötlemise käigus peab järgiv telg toorikuga kaasa liikuma ja peale töötlust naasma lähteasendisse.
Momendi juhtimine toimub läbi täpse ja dünaamilise voolu reguleerimise. Servoajam on suuteline arendama maksimaalset momenti ka väikestel kiirustel, mistõttu kasutatakse teda mähkimismasinates ja presside käitamisel.
Samm-mootoriga elektriajam
Samm-mootori ehitus ja tööpõhimõte
Samm-mootor on elektrimasin, mis muudab alalispinge impulsid mootori võlli mehaaniliseks energiaks. Samm-mootoritel on sõltuvalt ehitusviisist (bipolaarsed või unipolaarsed mootorid) 4, 6 või 8 ühendusklemmi, ehitusviisilt on nad on sünkroonmootorid, mille rootor pöörleb vastavalt staatorimähisesse antud taktimpulssidele ja mille pöördenurk on määratud läbitud sammude arvuga.
Kuna samm-mootor on numbriliselt juhitav, siis sobib ta ideaalselt kokku diskreetsete juhtimissüsteemidega, näiteks mikroprotsessoriga. Igale impulsile vastab teatud pöördenurk α, n impulsile aga pöördenurk γ= n·α . Siit järeldub, et samm-mootorit võib kasutada positsioneerimisel avatud juhtimisahelaga, st tagasisideta süsteemides. Samm-mootori eeliseks on asjaolu, et puudub tagasisideanduri vajadus ajami positsioneerimisel. Positsioneerimistäpsuse suurendamiseks konstrueeritakse mootorid suurema pooluste arvuga. Kuna samm-mootorit juhitakse järjestikuste impulssidega, siis võib madalatel pööretel olla samm-mootori liikumine katkendlik.
Samm-mootorid on rentaablid võimsuseni kuni ~1 kW, neid toodetakse ka lineaarmootorite kujul.
Samm-mootori ühe takti samm ehk sammunurk α
![]()
kus Nph on pooluste arv faasi kohta, m faaside arv ning Z hammaste arv.
Samm-mootor koos taktgeneraatori ja lõppastmega moodustab samm-ajami (Joonis 6.82). Taktsignaalid moodustatakse töö etteandesuuruste (kiirus, asend, kiirendus) alusel ja nendega tüüritakse transistorlülititest koosnevat lõppastet. Transistorlülitite ülesanne on samm-mootori mähiste kommuteerimine ettenähtud liikumistrajektoori tagamiseks.
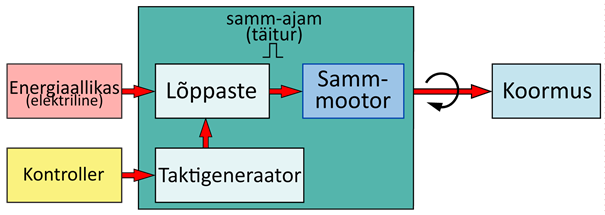
Samm-mootorite tüübid
Samm-mootorid jaotatakse vastavalt ehitusviisile reluktants- (reaktiivrootoriga) ja püsimagnet- (aktiivrootoriga) mootoriteks, võimalik on ka kombineeritud konstruktsioon. Reluktants-samm-mootori rootor koosneb monoliitsest hammastega elektrotehnilisest terasest südamikust; staatorivoolu väljalülitamisel kaob ka jääkmagnetism. Seetõttu saab peale mootori pingestamist magnetvoog liikuda takistamatult läbi südamiku. Reluktantsmootori rootor hakkab liikuma väiksema magnetilise takistuse suunas, st väikseima õhupiluni järgmise hamba ja mähise vahel.
Püsimagnet-samm-mootorite (Joonis 6.83a) staator koosneb elektrotehnilisest terasest ja rootor vahelduvate poolustega püsimagnetitest. Rootor pannakse pöörlema staatoris tekitatava magnetvälja abil.
Kuna reluktants-samm-mootoritel (Joonis 6.83b) puuduvad püsimagnetid, ei eksisteeri neil vooluvabas olekus ka takistusmomenti. Püsimagnet-samm-mootorite pooluste arv ja seega ka positsioneerimistäpsus on piiratud. Hübriid-samm-mootoris (Joonis 6.83c) on esindatud mõlema ehitusviisi omadused, tema rootoril on nii püsimagnetid kui hammasvöö.
Suuremomendilisteks mootoriteks nimetatakse samm-mootoreid, mille rootorite valmistamisel on kasutatud eriti tugevaid haruldastest muldmetallidest püsimagneteid. Sellised magnetid tekitavad tavalisest suuremaid väljatihedusi.
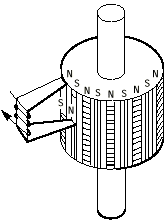 |
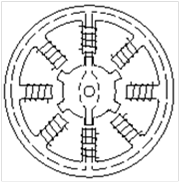 |
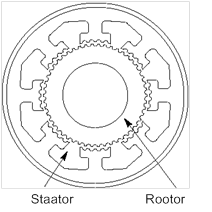 |
| a) aktiivrootoriga | b) reaktiivrootoriga | c) hübriidrootoriga |
Samm-mootorite tööpõhimõte
5 või 6 ühendusjuhtmega ja keskväljavõttega unipolaarsed samm-mootorid ühendatakse reeglina (Joonis 6.84a) toodud skeemi järgi. Keskväljavõte ühendatakse tavaliselt toite plussklemmiga ja kummagi mähise otsasid kommuteeritakse soovitud pöörlemissuuna saavutamiseks vaheldumisi toite miinusklemmiga. Näidatud mootori sammunurk on 30° mähis 1 on jaotatud üla- ja alapooluse ning mähis 2 vasaku ja parema pooluse vahel. Aktiivrootoril on kokku 6 vahelduvat, ümbermõõdule jaotatud poolust. Kommuteerides toite mähiselt 1 ümber mähisele 2, liigub rootor 30° ehk ühe sammu võrra. Pidev liikumine saavutatakse mähiste 1 ja 2 järjestikuste ümberlülitustega.
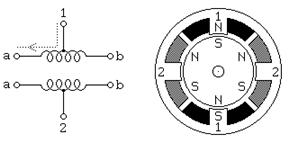 |
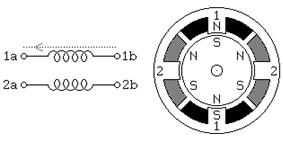 |
| a) unipolaarne | b) bipolaarne |
Bipolaarsete mootorite ehitus (Joonis 2.38b) sarnaneb unipolaarsete mootorite omaga, erinevus seisneb keskväljavõtete puudumises. Seega on mootor lihtsama konstruktsiooniga, kuid lõppastme topoloogia vahelduva polaarsuse tõttu keerukam. Jättes mähised ümber lülitamata, säilitab pingestatud aktiiv- või hübriidrootoriga samm-mootor hoidemomendi, mis väldib rootori iseeneslikku liikumahakkamist väliste jõudude toimel.
Samm-mootori juhtimine
Lihtsaim samm-mootori juhtimisviis on ühefaasiline talitlus, mille puhul pingestatakse ainult ühte mähist korraga. Meetodi puuduseks on saavutatava momendi väiksus, rootori võimalikud asendid on nt kahefaasilise kahe hambaga mootori korral 0°, 90°, 180° ja 270°. Mõlema mähise samaaegsel pingestamisel hakkab mootor tööle kahefaasilises täissammtalitluses (Joonis 6.85a) ja saavutab suurema pöördemomendi. Asendid jäävad täpselt ühefaasilise talitluse positsiooninurkade vahele, olles vastavalt 45°, 135°, 225° ja 315°. Mõlema talitlusviisi kombineerimisel, st ühe või mõlema mähise vahelduval pingestamisel on võimalik saavutada juba 8 asendit, sellist talitlusviisi nimetakse poolsammtalitluseks (Joonis 6.85b).
Toites samm-mootori mõlemat mähist vastavalt siinus-koosinussignaaliga, on tulemuseks ideaaliähedane pöördmagnetväli ja sellest lähtuvalt ka pöördliikumine. Mootori efektiivsus kasvab koos sammude arvuga pöörde kohta: energiatarve ühtlustub, väheneb sammukao oht ning mootor töötab tunduvalt sujuvamalt.
Toites samm-mootori mähiseid siinus-koosinus seaduspärasuse järgi diskreetsete impulssidega, on tulemuseks nn mikrosammtalitlus. Taolise talitlusviisi eeliseks on liikumise suurem sujuvus, kuid puuduseks vähenenud täpsus, mis eeldab tagasisideahelate kasutamist.
| a) | 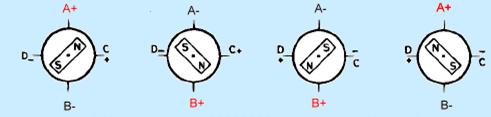 |
| b) | 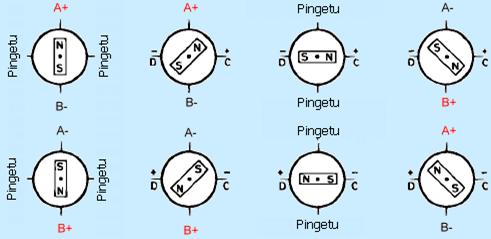 |
Samm-ajam peab läbitud nurga arvestust loendatud impulsside järgi, saades asendi juurdekasvu ehk inkremendi. Absoluutasendi määramiseks tuleb esmalt loendur nullida algpositsiooni määratlemisega, selleks kasutatakse reeglina piirlüliteid.
Samm-ajami juhtimisosa koosneb mikrokontrolleril põhinevast taktgeneraatorist ja lõppastmest (Joonis 6.86). 4 mähiseotsa pingestamisteks peab mikrokontroller väljastama 4-kohalise bitijada. Iga bitijadaga pöördub rootor ühe sammu võrra, pidev pöörlemine on realiseeritav tarkvaraliselt programmitsükliga, kus antakse ette sammude arv. Samm-mootori suureks eeliseks on asjaolu, et tema asend on piisavalt suure täpsusega määratav. Teades nt ratta ümbermõõtu, võib välja arvutada suuruse samm/cm, ehk 1cm läbimiseks vajamineva sammude hulga. Sellest lähtuvalt võib koostada töö alamprogrammi, mis kasutab sisendsuurusena teepikkust, arvutab sellest sammude hulga ja edastab selle portide kaudu tsüklina lõppastmele (joon 6,86).
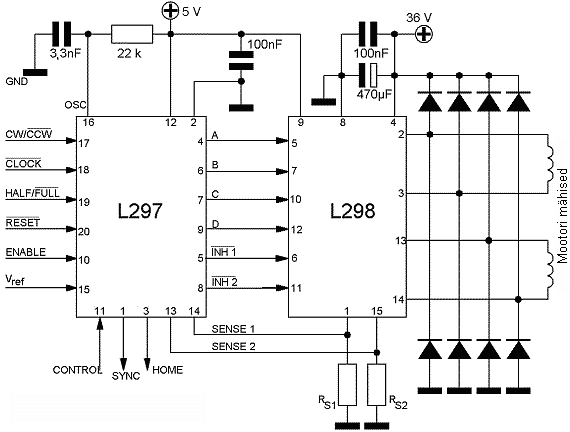
Lõppastme sisendklemmid võib ühendada otse mikrokontrolleri väljundporti või arvuti paralleelporti:
| Tähis |
Selgitus |
|---|---|
CW/CCW |
Annab ette mootori pöörlemissuuna (CW = ClockWise = kellaosuti liikumise suund, CCW = CounterClockWise = kellaosuti liikumisele vastu). |
Clock |
Lühikese impulsi andmisel liigub mootor ühe sammu võrra. Juhtimistsüklis pingestatakse ainult seda klemmi. |
Half/Full |
Vaikimisi on see klemm maandatud. Andes talle pinge +5V, hakkab mootor tööle poolsammtalitluses, st pöörde kohta tuleb kaks korda rohkem samme. |
Enable |
Selle klemmi maandamisel lülitub mootori toitepinge välja. |
Vref |
Pingega Vref (0...3 V) määratakse mootori suurim vool. Nt kui mootori suurim vool Im = 0,5A ja valitud Rs = 1Ω, tuleb klemmile Vref anda pinge 0,5V. Lihtsaimalt on see teostatav potentsiomeetri abil. |
RESET |
Lähtestab samm-mootori. Mootori töötamiseks peab tal pidevalt olema +5 V pinge. |
Control |
Lõiketalitluse viisi muutmiseks. Aktiivse sisendi puhul kahaneb vool aeglaselt (faasilõige), kiireks vähendamiseks eemaldatakse tüürpinge. |
Sync, Home |
Need klemmid jäävad tavaliselt ühendamata. |
Nagu selgub, on samm-mootori käitamiseks soovitud suunas ja soovitud kiirusega vaja ainult 3 pordi klemmi.
Samm-mootori koormamine
Samm-mootori poolt arendatav moment sõltub lülitussagedusest ja järelikult ka mootori pöörlemiskiirusest. Mootorid arendavad tüübisildil näidatud nimimomenti ainult väga madalatel kiirustel. Pöörlemiskiiruse suurenemisel arendatav moment väheneb, mis teatud kiiruse puhul võib ajami viia vääratustalitlusse, mida iseloomustab sünkronismist väljalangemine ehk sammukadu. Taolise momendikarakteristiku põhjuseks on mähiste induktiivsus. Mähiste pidevate ümberlülitamiste tõttu tekitavad induktiivsused vastuelektromotoorjõu, mistõttu suurtel kiirustel pole enam võimalik saavutada nimivoolu ega -momenti. Tänapäevaseid samm-mootoreid toidetakse enamasti reguleeritavatest vooluallikatest, mis tagavad püsiva voolu ja momendi suuremas kiiruspiirkonnas. Voolu hoidmisel konstantsena võib nt 12V nimipingega samm-mootori klemmipinge tõusta isegi 30V...40V lähedale.
Samm-mootori koormamisel tuleb kinni pidada teatud piirangutest (Joonis 6.87).
1. Hoidemoment Th on väärtus, milleni saab seisvat, staatiliselt pingestatud mootorit koormata, ilma et tema rootor veel ei pöörduks.
2. Käivitus-peatumissagedus fs on suurim sammusagedus, mille juures koormamata samm-mootor käivitub sünkronismist välja langemata.
3. Mootori kiirus on piiratud suurima tühijooksusagedusega fmax.
4. Mootori kiirendus- ja pidurduspiirkond, kus puudub sünkronismist väljalangemise oht, on piiratud vastava kõveraga. Samuti on kõveraga piiratud püsitalitluspiirkond.
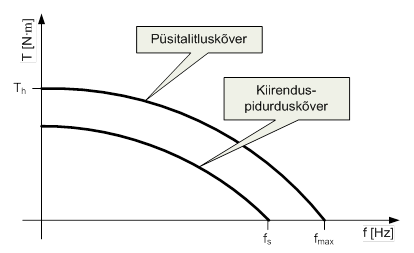
Arvutusülesanne
Hübriidrootoriga samm-mootori staator koosneb kahest poolusest ja rootor 100-st hambast.
1. Kui suur on selle mootori samm täissammtalitluses?
2. Kui suur peab olema taktsagedus, et mootor pöörleks kiirusega n = 500min-1?
Lahendus:
Samm-mootori sammunurk ![]()
Vajalik taktsagedus ![]()
