
TÄITURID - ELEKTROMEHAANILISED TÄITURID
Samm-mootoriga elektriajam
Samm-mootori ehitus ja tööpõhimõte
Samm-mootor on elektrimasin, mis muudab alalispinge impulsid mootori võlli mehaaniliseks energiaks. Samm-mootoritel on sõltuvalt ehitusviisist (bipolaarsed või unipolaarsed mootorid) 4, 6 või 8 ühendusklemmi, ehitusviisilt on nad on sünkroonmootorid, mille rootor pöörleb vastavalt staatorimähisesse antud taktimpulssidele ja mille pöördenurk on määratud läbitud sammude arvuga.
Kuna samm-mootor on numbriliselt juhitav, siis sobib ta ideaalselt kokku diskreetsete juhtimissüsteemidega, näiteks mikroprotsessoriga. Igale impulsile vastab teatud pöördenurk α, n impulsile aga pöördenurk γ= n·α . Siit järeldub, et samm-mootorit võib kasutada positsioneerimisel avatud juhtimisahelaga, st tagasisideta süsteemides. Samm-mootori eeliseks on asjaolu, et puudub tagasisideanduri vajadus ajami positsioneerimisel. Positsioneerimistäpsuse suurendamiseks konstrueeritakse mootorid suurema pooluste arvuga. Kuna samm-mootorit juhitakse järjestikuste impulssidega, siis võib madalatel pööretel olla samm-mootori liikumine katkendlik.
Samm-mootorid on rentaablid võimsuseni kuni ~1 kW, neid toodetakse ka lineaarmootorite kujul.
Samm-mootori ühe takti samm ehk sammunurk α
![]()
kus Nph on pooluste arv faasi kohta, m faaside arv ning Z hammaste arv.
Samm-mootor koos taktgeneraatori ja lõppastmega moodustab samm-ajami (Joonis 2.36). Taktsignaalid moodustatakse töö etteandesuuruste (kiirus, asend, kiirendus) alusel ja nendega tüüritakse transistorlülititest koosnevat lõppastet. Transistorlülitite ülesanne on samm-mootori mähiste kommuteerimine ettenähtud liikumistrajektoori tagamiseks.
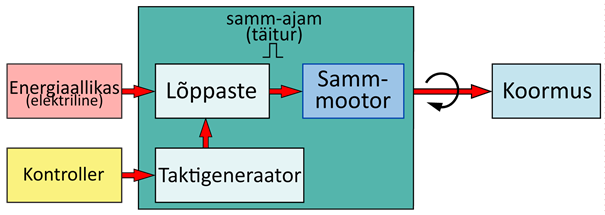
Joonis2.36. Samm-ajami struktuurskeem
Samm-mootorite tüübid
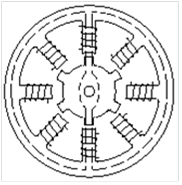
Samm-mootorid jaotatakse vastavalt ehitusviisile reluktants- (reaktiivrootoriga) ja püsimagnet- (aktiivrootoriga) mootoriteks, võimalik on ka kombineeritud konstruktsioon. Reluktants-samm-mootori rootor koosneb monoliitsest hammastega elektrotehnilisest terasest südamikust; staatorivoolu väljalülitamisel kaob ka jääkmagnetism. Seetõttu saab peale mootori pingestamist magnetvoog liikuda takistamatult läbi südamiku. Reluktantsmootori rootor hakkab liikuma väiksema magnetilise takistuse suunas, st väikseima õhupiluni järgmise hamba ja mähise vahel.
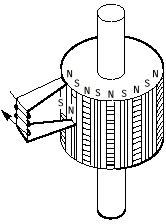
Püsimagnet-samm-mootorite (Joonis 2.37a) staator koosneb elektrotehnilisest terasest ja rootor vahelduvate poolustega püsimagnetitest. Rootor pannakse pöörlema staatoris tekitatava magnetvälja abil.
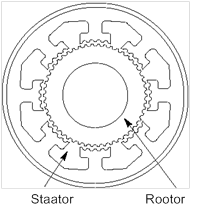
Kuna reluktants-samm-mootoritel (Joonis 2.37b) puuduvad püsimagnetid, ei eksisteeri neil vooluvabas olekus ka takistusmomenti. Püsimagnet-samm-mootorite pooluste arv ja seega ka positsioneerimistäpsus on piiratud. Hübriid-samm-mootoris (Joonis 2.37c) on esindatud mõlema ehitusviisi omadused, tema rootoril on nii püsimagnetid kui hammasvöö.
Suuremomendilisteks mootoriteks nimetatakse samm-mootoreid, mille rootorite valmistamisel on kasutatud eriti tugevaid haruldastest muldmetallidest püsimagneteid. Sellised magnetid tekitavad tavalisest suuremaid väljatihedusi.
|
|
|
| a) aktiivrootoriga | b) reaktiivrootoriga | c) hübriidrootoriga |
joonis 2.37. Samm-mootorite tüübid [25]
Samm-mootorite tööpõhimõte
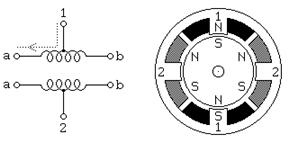
5 või 6 ühendusjuhtmega ja keskväljavõttega unipolaarsed samm-mootorid ühendatakse reeglina (Joonis 2.38a) toodud skeemi järgi. Keskväljavõte ühendatakse tavaliselt toite plussklemmiga ja kummagi mähise otsasid kommuteeritakse soovitud pöörlemissuuna saavutamiseks vaheldumisi toite miinusklemmiga. Näidatud mootori sammunurk on 30°. mähis 1 on jaotatud üla- ja alapooluse ning mähis 2 vasaku ja parema pooluse vahel. Aktiivrootoril on kokku 6 vahelduvat, ümbermõõdule jaotatud poolust. Kommuteerides toite mähiselt 1 ümber mähisele 2, liigub rootor 30° ehk ühe sammu võrra. Pidev liikumine saavutatakse mähiste 1 ja 2 järjestikuste ümberlülitustega.
|
|
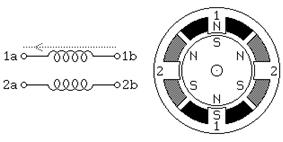
| a) unipolaarne | b) bipolaarne |
Joonis 2.38. Samm-mootorite ühendusviisid [25]
Bipolaarsete mootorite ehitus (Joonis 2.38b) sarnaneb unipolaarsete mootorite omaga, erinevus seisneb keskväljavõtete puudumises. Seega on mootor lihtsama konstruktsiooniga, kuid lõppastme topoloogia vahelduva polaarsuse tõttu keerukam. Jättes mähised ümber lülitamata, säilitab pingestatud aktiiv- või hübriidrootoriga samm-mootor hoidemomendi, mis väldib rootori iseeneslikku liikumahakkamist väliste jõudude toimel.
Samm-mootori juhtimine
Lihtsaim samm-mootori juhtimisviis on ühefaasiline talitlus, mille puhul pingestatakse ainult ühte mähist korraga. Meetodi puuduseks on saavutatava momendi väiksus, rootori võimalikud asendid on nt kahefaasilise kahe hambaga mootori korral 0°, 90°, 180° ja 270°. Mõlema mähise samaaegsel pingestamisel hakkab mootor tööle kahefaasilises täissammtalitluses (Joonis 2.39a) ja saavutab suurema pöördemomendi. Asendid jäävad täpselt ühefaasilise talitluse positsiooninurkade vahele, olles vastavalt 45°, 135°, 225° ja 315°. Mõlema talitlusviisi kombineerimisel, st ühe või mõlema mähise vahelduval pingestamisel on võimalik saavutada juba 8 asendit, sellist talitlusviisi nimetakse poolsammtalitluseks (Joonis 2.39b).
Toites samm-mootori mõlemat mähist vastavalt siinus-koosinussignaaliga, on tulemuseks ideaaliähedane pöördmagnetväli ja sellest lähtuvalt ka pöördliikumine. Mootori efektiivsus kasvab koos sammude arvuga pöörde kohta: energiatarve ühtlustub, väheneb sammukao oht ning mootor töötab tunduvalt sujuvamalt.
Toites samm-mootori mähiseid siinus-koosinus seaduspärasuse järgi diskreetsete impulssidega, on tulemuseks nn mikrosammtalitlus. Taolise talitlusviisi eeliseks on liikumise suurem sujuvus, kuid puuduseks vähenenud täpsus, mis eeldab tagasisideahelate kasutamist.
| a) | 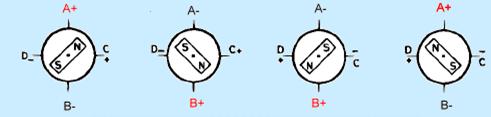
|
| b) | 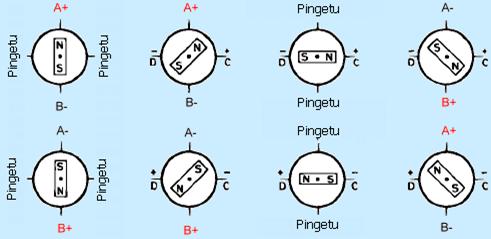
|
Joonis 2.39. Rootori võimalikud asendid täis- (a) ja poolsammtalitluses (b) [25]
Samm-ajam peab läbitud nurga arvestust loendatud impulsside järgi, saades asendi juurdekasvu ehk inkremendi. Absoluutasendi määramiseks tuleb esmalt loendur nullida algpositsiooni määratlemisega, selleks kasutatakse reeglina piirlüliteid.
Samm-ajami juhtimisosa koosneb mikrokontrolleril põhinevast taktgeneraatorist ja lõppastmest (Joonis 2.40). 4 mähiseotsa pingestamisteks peab mikrokontroller väljastama 4-kohalise bitijada. Iga bitijadaga pöördub rootor ühe sammu võrra, pidev pöörlemine on realiseeritav tarkvaraliselt programmitsükliga, kus antakse ette sammude arv. Samm-mootori suureks eeliseks on asjaolu, et tema asend on piisavalt suure täpsusega määratav. Teades nt ratta ümbermõõtu, võib välja arvutada suuruse samm/cm, ehk 1cm läbimiseks vajamineva sammude hulga. Sellest lähtuvalt võib koostada töö alamprogrammi, mis kasutab sisendsuurusena teepikkust, arvutab sellest sammude hulga ja edastab selle portide kaudu tsüklina lõppastmele (joon 2.40).
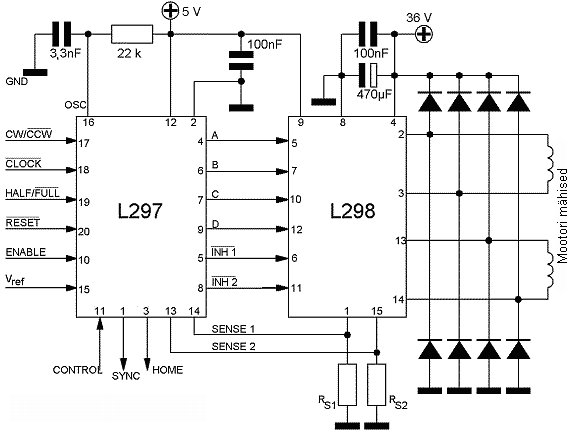
Joonis 2.40. Samm-ajami lõppastme skeeminäidis [25]
Lõppastme sisendklemmid võib ühendada otse mikrokontrolleri väljundporti või arvuti paralleelporti:
Tähis |
Selgitus |
|---|---|
CW/CCW |
Annab ette mootori pöörlemissuuna (CW = ClockWise = kellaosuti liikumise suund, CCW = CounterClockWise = kellaosuti liikumisele vastu). |
Clock |
Lühikese impulsi andmisel liigub mootor ühe sammu võrra. Juhtimistsüklis pingestatakse ainult seda klemmi. |
Half/Full |
Vaikimisi on see klemm maandatud. Andes talle pinge +5V, hakkab mootor tööle poolsammtalitluses, st pöörde kohta tuleb kaks korda rohkem samme. |
Enable |
Selle klemmi maandamisel lülitub mootori toitepinge välja. |
Vref |
Pingega Vref (0...3 V) määratakse mootori
suurim vool. Nt kui mootori suurim vool Im = 0,5A ja valitud Rs = 1Ω, tuleb klemmile Vref anda pinge 0,5V. Lihtsaimalt on see teostatav potentsiomeetri abil. |
RESET |
Lähtestab samm-mootori. Mootori töötamiseks peab tal pidevalt olema +5 V pinge. |
Control |
Lõiketalitluse viisi muutmiseks. Aktiivse sisendi puhul kahaneb vool aeglaselt (faasilõige), kiireks vähendamiseks eemaldatakse tüürpinge. |
Sync, Home |
Need klemmid jäävad tavaliselt ühendamata. |
Nagu selgub, on samm-mootori käitamiseks soovitud suunas ja soovitud kiirusega vaja ainult 3 pordi klemmi.
Samm-mootori koormamine
Samm-mootori poolt arendatav moment sõltub lülitussagedusest ja järelikult ka mootori pöörlemiskiirusest. Mootorid arendavad tüübisildil näidatud nimimomenti ainult väga madalatel kiirustel. Pöörlemiskiiruse suurenemisel arendatav moment väheneb, mis teatud kiiruse puhul võib ajami viia vääratustalitlusse, mida iseloomustab sünkronismist väljalangemine ehk sammukadu. Taolise momendikarakteristiku põhjuseks on mähiste induktiivsus. Mähiste pidevate ümberlülitamiste tõttu tekitavad induktiivsused vastuelektromotoorjõu, mistõttu suurtel kiirustel pole enam võimalik saavutada nimivoolu ega -momenti. Tänapäevaseid samm-mootoreid toidetakse enamasti reguleeritavatest vooluallikatest, mis tagavad püsiva voolu ja momendi suuremas kiiruspiirkonnas. Voolu hoidmisel konstantsena võib nt 12V nimipingega samm-mootori klemmipinge tõusta isegi 30V...40V lähedale.
Samm-mootori koormamisel tuleb kinni pidada teatud piirangutest (Joonis 2.41).
1. Hoidemoment Th on väärtus, milleni saab seisvat, staatiliselt pingestatud mootorit koormata, ilma et tema rootor veel ei pöörduks.
2. Käivitus-peatumissagedus fs on suurim sammusagedus, mille juures koormamata samm-mootor käivitub sünkronismist välja langemata.
3. Mootori kiirus on piiratud suurima tühijooksusagedusega fmax.
4. Mootori kiirendus- ja pidurduspiirkond, kus puudub sünkronismist väljalangemise oht, on piiratud vastava kõveraga. Samuti on kõveraga piiratud püsitalitluspiirkond.
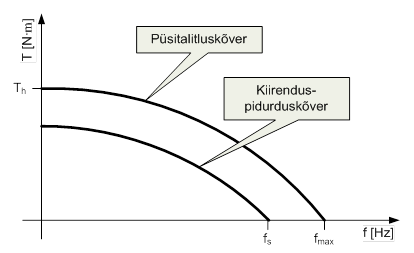
Joonis 2.41. Samm-mootori kiiruse-momendi tunnusjoon [25]
Arvutusülesanne
Hübriidrootoriga samm-mootori staator koosneb kahest poolusest ja rootor 100-st hambast.
1. Kui suur on selle mootori samm täissammtalitluses?
2. Kui suur peab olema taktsagedus, et mootor pöörleks kiirusega n = 500min-1?
Lahendus:
Samm-mootori sammunurk ![]()
Vajalik taktsagedus ![]()
Samm-mootori kasutamise näide
Tööstusroboti haaratsit juhitakse sammootoriga. Kogu süsteemi tunnusjoon on näidatud (Joonis 2.42). Avatud haaratsi maksimaalne laius on 60mm. Haaratava objekti laius on 35mm. Mitu impulssi tuleb mootorile anda, et sulgeda see objekt haaratsi vahele jõuga 6N, kui haarats on algpositsioonis 53mm?
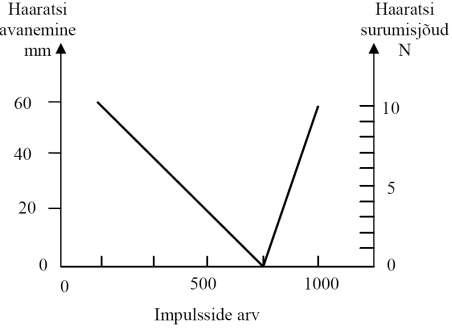
Joonis
Lahendus:
Nagu jooniselt näha, lõikab graafik x-telge impulsside arvu
750 juures ning maksimaalse jõu 10N saavutab haarats 1000 impulsi korral.
Et avatud haarats laiusega 60mm haaraks 35mm laia objekti läheb
vaja ![]()
Saavutamaks haaramisjõudu 6N läheb vaja ![]()
Impulsside koguarv ![]() .
.
