
Sagedusmuunduriga rakenduse juhtimine
| Digitaalsisendi 1 olek |
Digitaalsisendi 2 olek |
Ettemääratud sagedus |
|---|---|---|
| 0 | 0 | Sagedus 1 |
| 0 | 1 | Sagedus 2 |
| 1 | 0 | Sagedus 3 |
| 1 | 1 | Sagedus 4 |
On olemas mitmeid viise ajamite juhtimiseks PLCga. Ajami käivitamise ja peatamise juhtimine on hõlpsasti teostatav PLC digitaalväljundite kaudu, kuid ajami kiirusejuhtimine varieerub rakendusest rakendusse. Kõige lihtsam on kasutada kiirusejuhtimiseks sagedusmuunduris olevaid digitaalsisendeid. Tabelile 9.13.1 kohaselt saab kahe DI abil valida sagedusmuunduris neli erinevat ajami kiirust (pöörlemise sagedust). Sageduse juhtimist DI abil tuleb uurida täpsemalt sagedusmuunduri kasutusjuhendis, kuna erinevate tootjate sagedusmuundurite puhul võib see olla teostatud erinevalt. Juba 3 DI kasutamine lubab määrata ja kasutada 8 erinevat sagedust
Pöörlemissageduse väärtused tuleb sagedusmuunduris eelnevalt programmeerida (kasutades menüüd). Sagedusmuunduri DId ühendatakse seejärel juhtmete abil otse S7-300 PLC SMi digitaalväljunditega. Nüüd tuleb kirjutada STEP 7 keskkonnas kontrollerile rakendusprogramm. Programm juhib kontrolleri DOsi ja sealt edasi juhtmete kaudu sagedusmuunduri DIsi.
Digitaalsignaalide kasutamise puuduseks on asjaolu, et saab kasutada ainult kindlat arvu varemmääratud pöörlemissagedusi. Puuduse ületamiseks on paljudes sagedusmuundurites veel sisseehitatud analoogsisendid, enamasti 0 – 10 V või 4 - 20 mA. Seega saab PLC juhtida sagedusmuundurit otse analoogsignaali abil. Analoogsignaali väikseim väärtus 0 V või 4 mA vastab sagedusmuunduri sagedusele 0 Hz-le ja suurim 10 V või 20 mA 50 Hz-le. Ajami kiirust juhtiva signaali võib saada kontrolleris PID-regulaatori FB väljundist, mis edastatakse siis kontrolleri analoogmooduli väljundisse.
Lisaks DIdele ja AIdele võib kasutada sagedusmuunduri juhtimiseks andmesidekanaleid. Protokolliks võib olla näiteks PROFIBUS, PROFINET, MODBUS jne. Peale kiiruse juhtimise saab muuta ka teisi sagedusmuunduri parameetrite väärtusi (nt kiirendus ja aeglustus), valida kiiruse juhtimise meetodit ning jälgida elektriajami muude parameetrite väärtusi (pinge, vool, moment jne). Täpsemat infot sagedusmuunduri võimaluste kohta leiab tema kasutusjuhendist.
Rakenduse näide
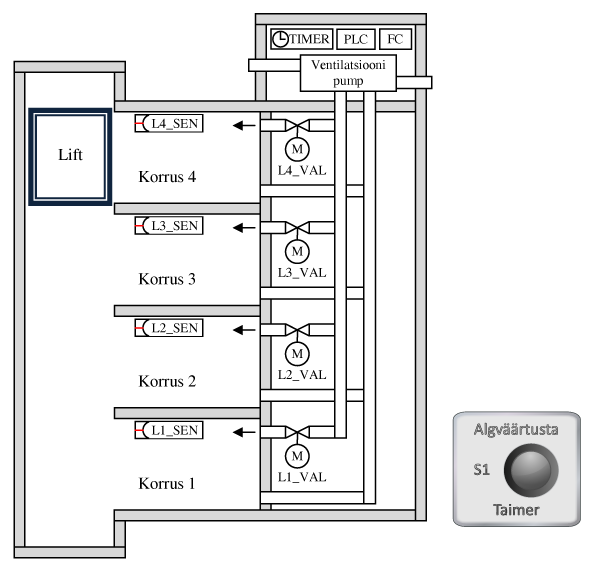
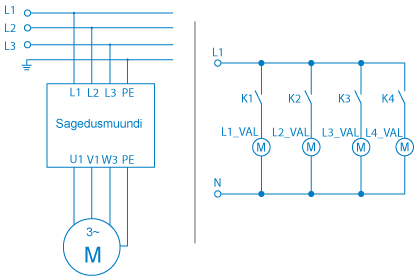
Joonisel 9.13.1 on kujutatud 4 korruselise laohoone ventilatsiooni juhtimissüsteemi näide [2]. Igal korrusel on liikumisandurid tööliste kohaloleku tuvastamiseks. Vastav liikumissignaal saadetakse PLCle. PLC juhib ventilatsioonisüsteemi ventilaatori kiirust ja selle õhuklappide asendeid. Hoone esimesel korrusel on nupp (S1), mis võimaldab ventilatsioonisüsteemil töötada kauem kui tööliste tööaeg ette näeb.
Elektriskeem
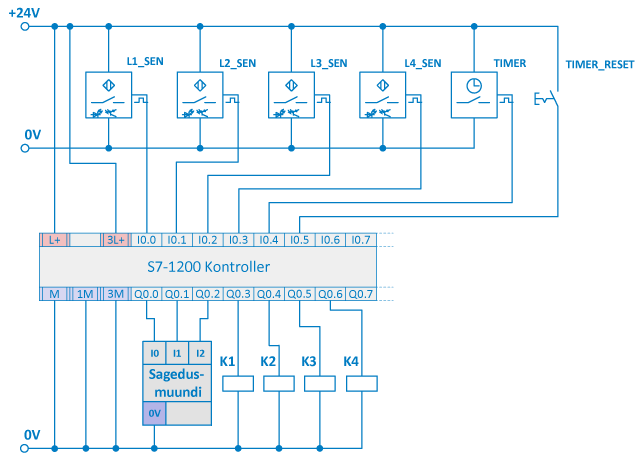
Süsteemi elektriosa koosneb neljast infrapunakiirega liikumisandurist (L1_SEN, L2_SEN, L3_SEN, L4_SEN), ühest eraldi seisvast taimerist (TIMER), ühest surunupust (S1), sagedusmuundurist (FC), neljast kontaktorist (K1, K2, K3, K4), neljast elektrimootoriga juhitavast õhuklapist (L1_VAL, L2_VAL, L3_VAL, L4_VAL) ning ühest Siemens S7-300 PLCst (milles on digitaalsed I/O moodulid).
PLC Programm
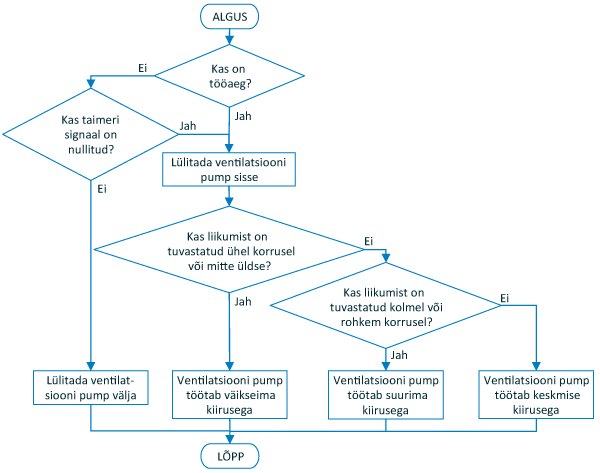
Ventilaator töötab kolme kiirusega. Väikseimat kiirust kasutatakse siis, kui ühelgi korrusel pole liikumist või on ainult ühel korrusel. Keskmist kiirust kastutatakse siis kui liikumisandurid tuvastavad liikumist kahel korrusel ning suurimat kiirust siis kui tuvastatakse liikumist kolmel või neljal korrusel korraga. Kiiruse väärtused on sagedusmuundurisse etteprogrammeeritud ja neid valitakse DIde kaudu vastavalt tabelile 9.13.1. Tabelist kasutatakse sagedusi 1, 2 ja 4. Soovitatav on seada sageduse 3 väärtuseks sageduse 2 väärtus, kuigi seda juhtimisprogrammis ei kasutata. See tagab süsteemi töö ka siis, kui PLC väljundid ühendatakse sagedusmuunduri sisendite külge valesti.
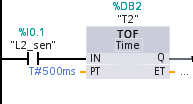
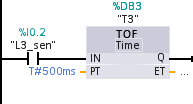
Korrus(t)el inimeste liikumist tuvastavad andurite signaalid on sageli lühiajalised. PLC programmi koostamisel kasutatakse taimereid (T0, T1, T2, T3), et pikendada liikumissignaalide ajalist kestust PLCs. Kui tööajal tuvastatakse mingil korrusel liikumine, siis alustatakse vastava korruse taimeris viivitusaja loendamine algusest.
Välist (füüsilist) taimerit kasutatakse ventilatsiooni lülitamiseks (tööpäeva lõpus välja ja hommikul uuesti sisse). Esimesel korrusel on käsilüliti, mis võimaldab eirata taimeri signaali ja kasutada ventilatsiooni ka teistel aegadel – nt tagada värsket õhku peale tööaega.
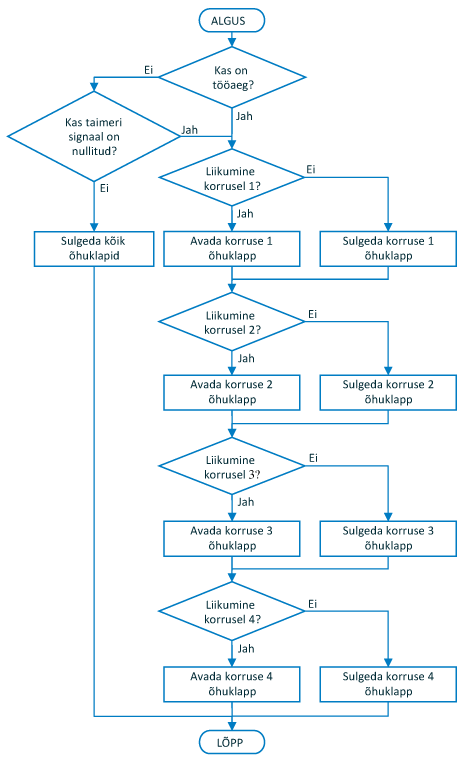
Liikumisanduri signaali alusel avatakse vastava korruse õhuklapp (võimaldab õhul siseneda antud korrusele). Siin kasutatakse ka taimerite (T0, T1, T2, T3) signaale.
Näidisrakenduse programmi kirjeldamiseks on kasutatud algoritmi plokkskeemi keelt. Tabelis 9.13.2 on esitatud algoritmi plokkskeemi keele enimkasutatavad sümbolid [23].
| Sümboli nimi | Sümbol | Kirjeldus |
|---|---|---|
| Alguse ja lõpu sümbol |  |
Kasutatakse plokkskeemi alguse ja lõpu tähistamiseks. plokkskeemil on üks algus ja üks lõpp. plokkskeem joonistatakse nende sümbolite vahele. Sõna “ALGUS” märgib plokkskeemi algust ja “LÕPP” lõppu. |
| Protsess |  |
Kasutatakse mingi tegevuse, ülesande või protsessi kujutamiseks. Tegevuse nimi kirjutatakse ristküliku sisse. |
| Otsus |  |
Kujutatakse tingimusi, mille puhul programm liigub edasi järgmise ülesandeploki või protsessi juurde. Igal otsusel on vähemalt kaks (või rohkem) tulemust. Enamasti on vastusteks “Jah” ja “Ei” või “Õige” ja “Vale”. Tähised kirjutatakse väljuvate joonte juurde. |
| Viivitus |  |
Kujutab ooteaega või viivitusaega, mis on vajalik protsessi toimumiseks. |
| Andmed |  |
Kujutab andmete sisestust ja/või väljastust plokkskeemis. |
| Andmete salvestamine |  |
Kujutab andmete salvestamist plokkskeemis. |
| Ettemääratud protsess |  |
Hõlmab üht või rida protsessi samme, mis on kirjeldatud ja määratud mujal (sama dokumendi erinevates kohtades). |
| Ühenduspunkt |  |
Tähistatakse samal lehel plokkskeemi siseseid hüppeid. Ühenduspunktide tähistamiseks kasutatakse enamasti suuri tähti (A, B, AA). |
| Leheülene ühenduspunkt |  |
Tähistatakse plokkskeemi siseseid hüppeid, mis ulatuvad diagrammil ühelt lehelt teisele (plokkskeem jätkub teisel lehel). Leheüleste ühenduspunktipaaride identifitseerimiseks kasutatakse täisarve (1, 2, 11). |
Joonistel 9.13.4 ja 9.13.5 on esitatud laohoone ventilatsioonisüsteemi juhtimisalgoritm. Esimene algoritm juhib ventilaatorit ja teine õhuklappe. Algoritmide alusel on koostatud PLC juhtimisprogrammid.
Sümbolite nimekiri
PLC programmis kasutatavad muutujate kirjeldus on esitatud tabelis 9.13.3. Abimuutujad Speed1 ja Speed3 on mõeldud programmi lihtsustamiseks.
| Muutuja sümbol | Aadressi tähis | Andmetüüp | Kommentaar | |
|---|---|---|---|---|
| L1_SEN | %I0.0 | BOOL | Korruse 1 liikumisandur | |
| L2_SEN | %I0.1 | BOOL | Korruse 2 liikumisandur | |
| L3_SEN | %I0.2 | BOOL | Korruse 3 liikumisandur | |
| L4_SEN | %I0.3 | BOOL | Korruse 4 liikumisandur | |
| TIMER | %I0.4 | BOOL | Esmaspäevast reedeni kella 8:00 kuni 17:00 on signaal 1. Teistel aegadel on see signaal 0 | |
| S1 | %I0.5 | BOOL | Käsijuhtimine. Lülitist tulev signaal võib nullida välisest taimerist tuleva signaali | |
| FC_IN1 | %Q0.0 | BOOL | Väljundsignaal. Sagedusmuunduri kiirus DI 1 | |
| FC_IN2 | %Q0.1 | BOOL | Kiiruse signaal. Sagedusmuunduri kiirus DI 2 | |
| FC_WORK | %Q0.2 | BOOL | Sagedusmuundur peab töötama | |
| L1_VAL | %Q0.3 | BOOL | Väljundsignaal. Avada korruse 1 õhuklapp | |
| L2_VAL | %Q0.4 | BOOL | Väljundsignaal. Avada korruse 1 õhuklapp | |
| L3_VAL | %Q0.5 | BOOL | Väljundsignaal. Avada korruse 1 õhuklapp | |
| L4_VAL | %Q0.6 | BOOL | Väljundsignaal. Avada korruse 1 õhuklapp | |
| Speed1 | %M0.0 | BOOL | Mälumuutuja. Ajam töötab väikseima kiirusega | |
| Speed3 | %M0.1 | BOOL | Mälumuutuja. Ajam töötab suurima kiirusega |
PLC programm on koostatud LAD keeles. Allpool on esitatud programmi väljatrükk koos kommentaaridega.
| Network 1: Liikumisandur 1 | Network 2: Liikumisandur 2 |
|---|---|
 |
 |
| Network 3: Liikumisandur 3 | Network 4: Liikumisandur 4 |
 |
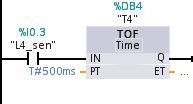 |
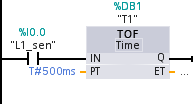
| Network 1 kuni 4 kasutatakse liikumisanduritest tulevate signaalide eluea pikendamiseks. Korrusel liikumise tuvastamisel aktiveeritakse taimeri väljund. Andurist signaali kadumisel taimer aktiveerub ja väljund on nii kaua aktiivne kuni viivitusaeg PT on läbi. Kui andurist tuleb uus signaal enne viivitusaja lõppu, siis nullitakse taimer. | |
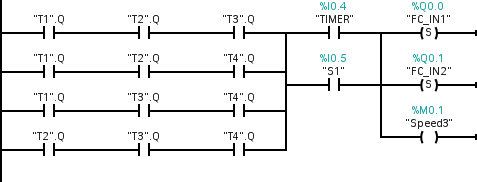
| Network 5: Ventilatsioon töötab väikseima kiirusega | |
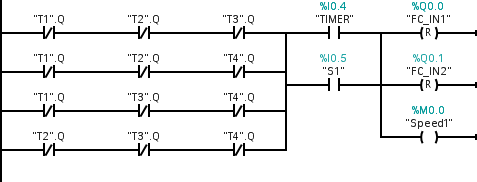
| Kui on tööaeg ning üks või mitte ükski liikumisandur pole aktiivne, siis töötab ventilatsiooni pump väikseima kiirusega. Kuna see on kõige väikseim kiirus, siis kasutatakse Sagedust 1 ning mõlemad sagedusmuunduri sisendid on 0. | |
 |
|
| Network 6: Ventilatsioon töötab suurima kiirusega | |
| Kui on tööaeg ning vähemalt kolm liikumisandurit väljastavad signaali 1, siis töötab ventilatsioon suurima kiirusega. Nüüd kasutatakse Sagedust 4 ning mõlemad sagedusmuunduri sisendid on 1. | |
 |
|
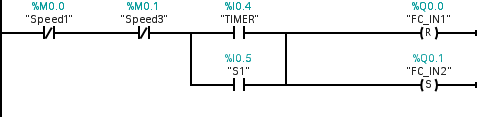
| Network 7: Ventilatsioon töötab keskmise kiirusega | |
| Kui on tööaeg ning ventilatsioon ei tööta väikseima ja suurima kiirusega, siis töötab ventilatsiooni pump keskmise kiirusega. See saavutatakse väikseima ja suurima kiiruse elimineerimisega (tuvastatakse Network 5 ja 6ga). Kasutatakse Sagedust 2 (sagedusmuunduri esimese sisendi signaal on 0 ja teise sisendi signaal on 1). | |
 |
|
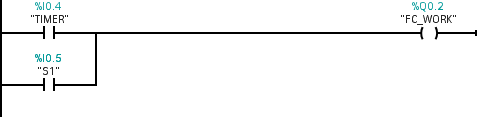
| Network 8: Sagedusmuundur lülitatakse sisse | |
| Kui on tööaeg või keegi lülitas “TIMER RESET” sisse (nullis taimeri signaali), siis lülitatakse sagedusmuundur töörežiimi. | |
 |
|
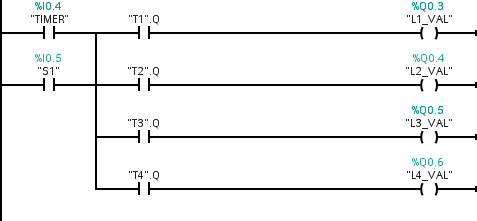
| Network 9: Korruse õhuklapid avatakse ja hoitakse lahti | |
| Kui on tööaeg ning mingi korruse liikumisandur annab signaali 1, siis avatakse vastava korruse õhuklapp. | |
 |
|
