

TÖÖSTUSLIKUD SIDEVÕRGUD
Tööväljavõrk CANBUS
Tööväljavõrk CANBUS
Tööväljavõrgu CANBUS protokolli kirjeldus
Kontrollersidevõrk (Controller Area Network, CAN) on jadaliides andmete reaalajaliseks edastamiseks kiirusega kuni 1 Mbit/s (megabitti sekundis), mille eeliseks on suurepärased veaparanduse võimalused. Seda kasutatakse kõrge kiirusega ISO 11898 andmete ülekandmiseks ja ka madala kiirusega ISO 11519 rakendustes. Seadmetevaheliseks kommunikatsiooniks kasutatakse OKI, MICROCHIP, MOTOROLA jt toodetud liideseadaptereid.
Füüsiline võrgu elemendiks on paralleeljuhtme liin (Joonis 6.1).
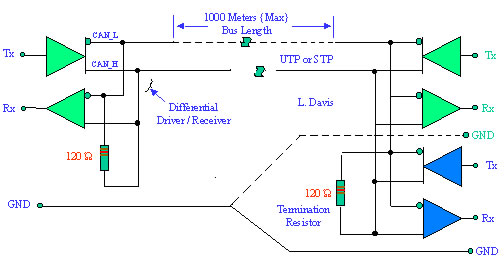
Joonis 6.1. Paralleeljuhtme liin [1]
Mööda CANi siini saadetakse samaaegselt edastatavad andmed kõigile võrguseadmetele laiali (Joonis 6.2).
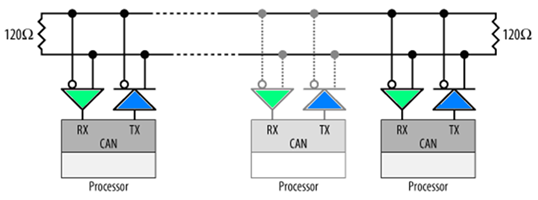
Joonis 6.2. CANi siin [1]
Tööpõhimõte
CAN-võrkude tööpõhimõte baseerub faktil, et iga moodul on võimeline sõnumeid edastama, kui siin vaba. Kuna igal sõnumil on prioriteet, siis mitme ülekandemooduli puhul edastatakse kõige kõrgema prioriteediga sõnum enne kui madalama prioriteediga. Analoogsel moel, kui mõnda moodulisse jõuab samaaegselt rohkem kui üks sõnum, siis käib vastuvõtmine vastavalt nende prioriteedile. Iga CAN-võrku kuuluv moodul võib nõuda sõnumite saatmist temale, saates selleks päringuid. Iga korrektselt vastu võetud sõnum kinnitatakse, saates vastav kinnitussõnum. Vastus saadetakse ka siis, kui sõnumi vastuvõtmine või täitmine ebaõnnestus mingi vea tõttu. CAN-võrk tunneb ära püsivigade esinemise ja sulgeb automaatselt vigase mooduli.
Sõnumi sisusse on kodeeritud spetsiaalne identifikaator – CAN-võrgu spetsiifiline, mis kannab informatsiooni edastatava sõnumi kohta (t, P, F).Kõik vastuvõtjad võtavad informatsiooni vastu ja igaüks testib identifikaatorit, et vaadata kas see sõnum on mõeldud vastuvõtjale. Kui sõnum on vastuvõtjale sobilik, võetakse see vastu ja töödeldakse, kui mitte, jäetakse see sõnum vahele. Identifikaator sisaldab infot sõnumi prioriteedi kohta, mis jaotatakse vähemalt kahele tasandile: kõrge ja madal. Informatsiooni edastamine käib üle paralleelse keerutatud juhtmepaari või telefoniliini, kui tekkivad häired ei ole kõrged.
- CAN-võrk on paindlik ja võimaldab lisada uusi seadmeid juba toimivasse CAN-võrku ilma, et selles oleks vaja teha uusi riistvaralisi või tarkvaralisi lisamuudatusi.
- CAN kasutab NRZ (Non Return to Zero) meetodit andmete kodeerimiseks. NRZ-kodeerimine tekitab lühikesed sõnumid minimaalse arvu üleminekutega ja ei ole väliste häirete poolt oluliselt mõjutatav.
- CAN-võrkudes antakse kõrgem prioriteet nendele parameetritele (informatsioonile), mis muutuvad teistest kiiremini. Näiteks automootori pöörded muutuvad sagedamini kui selle temperatuur.
Parameetrite prioriteedi määramiseks kasutatakse liikluse ja põrke tuvastusega pöördusmeetodit (Carrier Sense, Multiple Access with Collision Detect (CSMA/CD). Sõnumi prioriteet salvestatakse identifikaatorisse süsteemi (CAN-võrgu) kavandamise esmases faasis. Kõige kõrgem prioriteet antakse kõige madalama digiväärtusega identifikaatorile.
Andmepaketi kirjeldus
CAN-süsteemis edastatakse ja võetakse vastu informatsioon andmepaketi formaadis (sõnumi kaader, message frame).
CAN-ist on 2 versiooni - 2.0А ja 2.0В. 2.0А versiooni iseloomustab 11-bitine identifikaator ja ehtne Bosh-i protokoll, samal ajal kui 2.0В versiooni iseloomustab 21-bitine identifikaator. Viimane on arendatud USAs Ameerika autotööstuse vajaduste tarbeks.
2.0A versioonile vastavad CAN-võrgud võtavad vastu ja edastavad informatsiooni seadmete vahel, mis on ehitatud ainult selle standardi kohaselt. 2.0B versiooni puhul võetakse vastu ja edastatakse informatsiooni segatud võrkudes, mis võivad sisaldavad mõlema CAN versiooni kontrollereid.
2.0A versiooni kaader on kujutatud pildil 6.3.
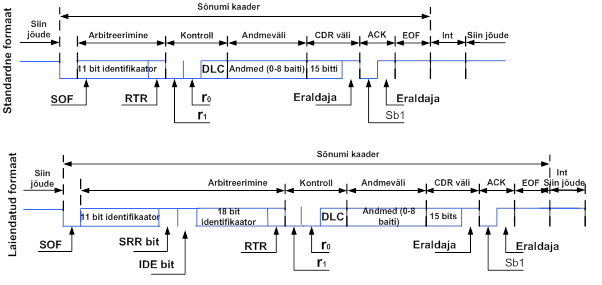
Joonis 6.3. 2.0A versiooni kaader [1]

Joonis 6.4. d ’dominantne’, r ’retsessiivne’ [1]
Andmebaitide arv |
Andmepikkuse kood |
||||
DLC3 |
DLC2 |
DLC1 |
DLC0 |
||
0 |
D |
d |
d |
d |
|
1 |
D |
d |
d |
r |
|
2 |
D |
d |
r |
d |
|
3 |
D |
d |
r |
r |
|
4 |
D |
r |
d |
d |
|
5 |
D |
r |
d |
r |
|
6 |
D |
r |
r |
d |
|
7 |
D |
r |
r |
r |
|
8 |
R |
d |
d |
d |
|
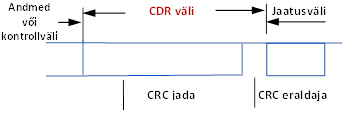
Joonis 6.5. CDR väli [1]
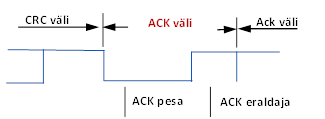
Joonis 6.6. ACK väli [1]
Algselt edastatakse mööda liini impulss mis muutub kõrgest potentsiaalist madalani mida kutsutakse alguskaadriks (StartOfFrame, SOF). Alguskaadrile järgneb 11-bitine identifikaator (arbitration), millesse on kodeeritud edastuse sisu. Sellele järgneb 1 bitine informatsioon kaugedastuspäringuna (Remote Transmission Request, RTR), mille abil küsitakse saatjalt autoriseeringut informatsiooni edastamiseks vastuvõtjale. Bitid r0 ja r1 on protokollis tühjad. Andmepikkuskoodi (Data Length Code, DLC) välja suurus on 4 bitti ja see sisaldab informatsiooni edastatava andmemahu kohta, mis edastatakse andmeintervalli ajal. Selle intervalli pikkus on 0 kuni 8 impulssi, mis on väljendatud andmepikkuskoodiga. DLC’le järgneb andmeväli (suurus 0 kuni 8 baiti), kuhu on salvestatud edastatav informatsioon. Järgmised 15 bitti moodustavad tsükkelkoodkontrolli (Cycle Redundance Code, CRC), mida kasutatakse vastuvõetud informatsiooni korrektsuse kontrollimiseks. Sellele järgneb DEL-ajavahemik. Informatsiooni edastava seadme tuvastamiseks kasutatakse kaht jaatusimpulssi (ACK), mis järgnevad DEL-ile. Andmepakett lõppeb kaadrilõpumärgiga (EOF), mille pikkus on 7 impulssi. Paketi lõppu tähistatakse 3 vaheaja (INTERMISSION) bitiga, peale mida vabastatakse liin järgmiste sõnumite jaoks.
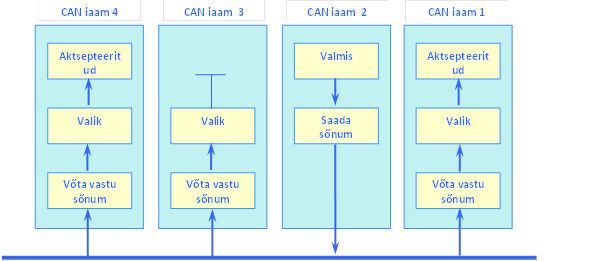
Joonis 6.7. CAN võrgu kommunikatsioon [1]
Retsessiivne ja dominantne bitt
Ülekandemeediumist isoleerimise huvides väldib CAN binaarsete „0“ ja „1“ väärtustega sõnumi kirjeldamist. Selle asemel võetakse vastu „retsessiivseid“ ja „dominantseid“ signaale. Näiteks optilise ühenduse puhul võib „retsessiivne“ signaal olla pimedus ja „dominantne“ valgus. Elektriliste signaalide puhul võib „retsessiivne“ signaal tähendada kõrget elektrilist signaali ning „dominantne“ signaal selle puudumist.
Kaadrite tüübid
CAN-protokollis eristatakse neli kaadrit:
- Andmekaader – edastab andmeid;
- Päringukaader - esitab andmekaadrite edastamise päringuid antud identifikaatori kohta;
- Ülelaadimise kaader – kindlustab andmekaadrite või päringute vahelised vahed;
- Veakaader – see edastatakse sõlmest (jaamast), kus tuvastati viga.
Andmekaadrid ja päringu-on eelnevatest kaadritest eraldatud vahedega.
Päringukaadri formaat vastab CANi standardsele kaadrile või laiendatud formaadile kahe erandiga:
RTR-väljas on „dominantne“ signaal asendatud „retsessiivse“ signaaliga;
Andmeväli puudub.
Arbitreerimine andmeedastuse ajal
Kui siin on vaba võib iga sõlm CAN-võrgus alustada suvalisel ajal andmete edastamist. Andmeedastuse arbitreerimine toimub, kui kahest või enamast sõlmest (tööjaamast) edastatakse mitu kaadrit samaaegselt (Joonis 6.8).
Prioriteet edastatakse koos sõnumiga, mis on salvestatud 11-bitisesse seadme identifikaatorisse (seadme aadressisse). Kõige madalama binaarväärtusega identifikaator on kõige kõrgema prioriteediga. Sõnumite prioriteet määratakse võrgu arendamise ajal ja seda ei saa dünaamiliselt (hiljem) muuta. Mitme kaardi edastamise ajal toimuvad kaadrite kokkupõrked lahendatakse igas tööjaamas omistatud identifikaatori numbrite võrdlemise teel. Pildil 6.8 on näide, mis illustreerib kirjeldatud juhtumit. Selles näites tahavad kolm CAN-sõlme oma andmeid edastada. Erinevalt Ethernet’ist ei ole CAN-võrgus pakettide kadu, nagu ka kokkupõrgete tekitamine, lubatud. CAN-võrgu suurimaks puuduseks on, et madala prioriteediga sõnumeid ei pruugi jõuda CAN-võrku ehk siis ei välju vastavast tööjaamast.
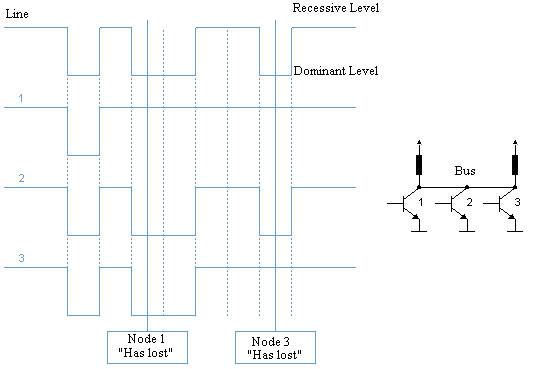
Joonis 6.8. Andmeedastuse arbitreerimine [1]
Veajuhtimine
CANi suureks eeliseks on mitmete veajuhtimise ja vigade vältimise mehhanismide olemasolu:
- Andmeülekande juhtimine: Andmeülekande ajal võrreldakse võrgu bititasandit edastatavate bittidega;
- Biti täitmine: Peale viie identse biti jadamisi edastamist järgneb automaatne vastupidise tähendusega biti edastus. Sel moel on kõik andmeväljad ja päringukaader kodeeritud, ainukeseks erandiks on kontrollsumma (CRC) eraldaja ja EOF-märk.
- Kontrollsumma: Saatja arvutab andmepaketi kontrollsumma ning lisab selle edastatavasse kaadrisse. Vastuvõtja loeb reaalajas juhtringi, arvutab vastuvõetud kaadri kontrollsumma ja võrdleb neid;
- Töövälja väärtuse kontrollimine sõnumi edastamise ajal.
Edastamiskiirus ja võrgu pikkus
Kiiruse ulatus
Kõik võrgu sõlmed peaksid tegutsema võrdsel kiirusel. CAN-standard ei määra edastamiskiirust, siiski kasutavad enamus CAN-võrkusid katkematut edastust kiirusega 20;Kbit/s kuni 1;Mbit/s. Loomulikult on olemas ka lahendusi, mis töötavad väljaspool seda vahemikku.
Kriitiline võrgu pikkus
Ülalkirjeldatud veajuhtimise meetodid eeldavad üle kogu võrgu hajutamist kuni selle arvutamise hetkeni. See omakorda määrab ära võrgu maksimaalse pikkuse. Mida kõrgem on ülekande kiirus, seda väiksem on võrgu pikkus. Järgnevalt on esitatud sõnumi edastamiskiirus ja sellele vastava võrgu kriitiline pikkus ISO 11898 standardi järgi:
- 1 Mbit/s - 40 m;
- 500 Kbit/s - 100 m;
- 125 Kbit/s - 500 m;
- 10 Kbit/s - 5000 m;
Kõrgtaseme/kihi protokollid
CAN põhispetsifikatsioon pakub terve hulga lisa võimalusi nagu 8 baidist pikema andmehulga edastamine; automaatne sõlmedevaheline identifikaatorite jaotamine, homogeenne erinevat tüüpi ja erineva tootlikkusega seadmete juhtimine. Selle tõttu on kõrgema tasandi CAN protokolli modifikatsioonid olnud selle loomisest saadik pidevas arenduses. Kõrgema tasandi CAN protokollid on:
- CANopen;
- DeviceNet;
- CAN Kingdom;
- J1939;
- SDS.
CANi eelised
- Võimalus tegutseda fikseeritud reaalajalises režiimis;
- Lihtne rakendada ja minimaalsed operatiivkulud;
- Kõrge häirekindlus;
- Võrgu ligipääsu arbitreerimine ilma mahukadudeta;
- Usaldatav veajuhtimine sõnumi ülekandmise ja vastuvõtmise ajal;
- Lai sõnumi edastamiskiiruse ulatus;
- Suur seadmetevaliku.
CANi puudused
- Võrgu kriitiline pikkus on pöördvõrdelises seoses edastamiskiirusega;
- Suur teenusega (CANi protokolliga) seotud andmete hulk edastatavas sõnumis (võrreldes kasulike andmetega);
- Kõrgema tasandi CANi protokollide konventsionaalse standardi puudumine.
Standardne võrk pakub laialdasi võimalusi praktiliseks turvaliseks andmeedastuseks sõlmede vahel. Järgnevad tabelid sisaldavad CAN-võrgu ühenduseks kõige sagedamini kasutatavaid konnektoreid ja nende jalgade (pistiku kontaktide) kirjeldusi.
Tabel 6.1 CAN-võrgu ühenduseks kasutatavad konnektorid ja nende jalgade (pistiku kontaktide) kirjeldused [1]
9 Pin (male) D-Sub CAN Bus PinOut |
||
Jalg # |
Signaalinimed |
Signaali kirjeldus |
1 |
Reserveeritud |
Ülenduse rada |
2 |
CAN_L |
Dominant, madal |
3 |
CAN_GND |
Maandus |
4 |
Reserveeritud |
Ülenduse rada |
5 |
CAN_SHLD |
Kilp, valikuline |
6 |
GND |
Maandus, valikuline |
7 |
CAN_H |
Dominant, kõrge |
8 |
Reserveeritud |
Ülenduse rada |
9 |
CAN_V+ |
Võimsus, valikuline |
10-Pin Header CAN Bus PinOut |
||
Pin # |
Signal Names |
Signal Description |
1 |
Reserveeritud |
Ülenduse rada |
2 |
GND |
Maandus, valikuline |
3 |
CAN_L |
Dominant, madal |
4 |
CAN_H |
Dominant, kõrge |
5 |
CAN_GND |
Maandus |
6 |
Reserveeritud |
Ülenduse rada |
7 |
Reserveeritud |
Ülenduse rada |
8 |
CAN_V+ |
Võimsus, valikuline |
9 |
Reserveeritud |
Ülenduse rada |
10 |
Reserveeritud |
Ülenduse rada |
7-Pin Open Style CAN Bus PinOut |
||
Jalg # |
Signaalinimed |
Signaali kirjeldus |
1 |
CAN_GND |
Maandus |
2 |
CAN_L |
Dominant, madal |
3 |
CAN_SHLD |
Kilp, valikuline |
4 |
CAN_H |
Dominant, kõrge |
5 |
CAN_V+ |
Võimsus, valikuline |
5-Pin Micro/Mini CAN Bus PinOut |
||
Jalg # |
Signaalinimed |
Signaali kirjeldus |
1 |
CAN_SHLD |
Kilp, valikuline |
2 |
CAN_V+ |
Võimsus, valikuline |
3 |
CAN_GND |
Maandus |
4 |
CAN_H |
Dominant, kõrge |
5 |
CAN_L |
Dominant, madal |
RJ10, RJ45 CAN Bus PinOut |
|||
RJ45 Jalg # |
RJ10 Jalg # |
Signaalinimi |
Signaali kirjeldus |
1 |
2 |
CAN_H |
Dominant, kõrge |
2 |
3 |
CAN_L |
Dominant, madal |
3 |
4 |
CAN_GND |
Maandus |
4 |
- |
Reserveeritud |
Ülenduse rada |
5 |
- |
Reserveeritud |
Ülenduse rada |
6 |
- |
CAN_SHLD |
CAN kilp, valikuline |
7 |
- |
CAN_GND |
Maandus |
8 |
1 |
CAN_V+ |
Võimsus, valikuline |
CAN Siini sisend/väljund omadused |
|
CANbus signaalitüüp |
Digitaalne liides |
Väljundpinge (kõrge) |
VOH +4 volti min, +5.5 volti maks |
Väljundpinge (madal) |
VOL +0 volti min, +1.5 volti maks |
Väljundpinge |
+16 volti (absoluutne maksimum) |
Väljundvool |
100mA |
Takistus |
124 oomi lõpetamine +/- terminalide vahel |
Lülituse tüüp |
Diferentsiaalne |
Bitiajad |
1uS @ 1Mb/s; 2uS @ .5Mb/s 4uS @ .25Mb/s |
Kodeerimisformaat |
Non-Return-to-Zero (NRZ) |
Edastuse/vastuvõtu sagedus |
1Mbit/s @ 40 meetrit |
Topoloogia |
Punkt-punkt |
Meedium |
Elektriline keerutatud paar (shielded Twisted pair, STP) 9-nõelaga D-Sub |
Ligipääsu juhtimine |
Liikluse ja põrke tuvastusega pöördus (carrier sense multiple access with collision detection, CSMA/CD) |
Ümar CAN Bus PinOut |
||||
9-Pin # |
8-Pin # |
7-Pin # |
Signaali nimed |
Signaali kirjeldus |
1 |
3 |
3 |
CAN-H |
Dominantne kõrge |
2 |
4 |
4 |
CAN-H |
Dominantne madal |
3 |
5 |
2 |
CAN_GND |
Maandus |
4 |
6 |
- |
- |
Reserveeritud |
5 |
7 |
- |
- |
Reserveeritud |
6 |
8 |
- |
- |
Reserveeritud |
7 |
1 |
1 |
CAN_V+ |
Võimsus, valikuline |
8 |
2 |
- |
GND |
Maandus |
9 |
- |
- |
- |
Reserveeritud |
- |
- |
5 |
DIL-1 |
DIP lüliti 1 ühenduses CAN_V+ |
- |
- |
6 |
DIL-2 |
DIP lüliti 2 ühenduses CAN_V+ |
- |
- |
7 |
DIL-3 |
DIP lüliti 3 ühenduses CAN_V+ |
9/12-Pin Round Flange Style CAN Bus PinOut |
|||
12-Pin # |
9-Pin # |
Signaali nimed |
Signaali kirjeldus |
1 |
- |
- |
Reserveeritud |
2 |
7 |
CAN-H |
Dominantne madal |
3 |
8 |
CAN_GND |
Maandus |
4 |
9 |
- |
Reserveeritud |
5 |
- |
- |
Reserveeritud |
6 |
- |
- |
Reserveeritud |
7 |
2 |
CAN-H |
Dominantne kõrge |
8 |
- |
- |
Ei kasutata |
9 |
- |
- |
Reserveeritud |
10 |
- |
GND |
Maandus, valikuline |
11 |
- |
- |
Reserveeritud |
12 |
1 |
CAN_V+ |
Võimsus, valikuline |
- |
3 |
DIL-1 |
DIP lüliti 1 ühenduses CAN_V+ |
- |
4 |
DIL-2 |
DIP lüliti 2 ühenduses CAN_V+ |
- |
5 |
DIL-3 |
DIP lüliti 3 ühenduses CAN_V+ |
- |
6 |
DIL-4 |
DIP lüliti 4 ühenduses CAN_V+ |
