
Elektriajami mehaanika
Elektrimootorit kasutatakse elektrienergia muundamiseks mehaaniliseks energiaks, et käitada sellega töömasinat või panna liikuma transpordivahend. Töömasinate tööorganid liiguvad:
- pidevalt ühtlase kiirusega pööreldes (continuous constant speed rotation)
- muutuva kiirusega pööreldes (variable speed rotation)
- muutuva kiiruse ja pöörlemissuunaga (variable speed rotation in both direction)
- ühtlaselt lineaarselt (continuous constant speed linear movement)
- perioodiliselt edasi-tagasi (cyclic reciprocal movement)
- mitteperioodiliselt edasi-tagasi (non-cyclic reciprocal movement).
Vastavalt töömasina tööorgani liikumisele tuleb valida ajami mootor ning mootorit ja töömasinat ühendav ülekandemehhanism (reduktor). Mootoreid valmistatakse erineva nimivõimsuse, -momendi ja -kiirusega. Sama nimivõimsuse puhul on suurema nimikiirusega ja väiksema nimimomendiga mootorite mass väiksem kui väiksema nimikiiruse ja suurema nimimomendiga mootoritel. Seetõttu võib suurema nimikiirusega mootorite kasutamine olla eelistatum. Teiselt poolt töötavad paljud töömasinad väikese kiirusega ning nende käitamiseks tuleks eelistada ka väiksema kiirusega mootoreid või kasutada mootori ja töömasina kiiruste sobitamiseks reduktoreid. Reduktor omakorda suurendab aga nii ajami massi kui ka hinda. Mootori ja reduktori valiku optimaalse lahenduse leidmine on ajami mehaanilise osa projekteerimise tähtsaim ülesanne.
Staatiline ja dünaamiline koormus. Ajameid võib liigitada vastavalt sellele, kas nende koormus on valdavalt staatiline või dünaamiline. Staatiline koormus võib:
- olla konstantne (constant torque) või sõltuda kiirusest;
- sõltuda asendist või läbitud teepikkusest;
- sõltuda ajast.
Konstantset või kiirusest sõltuvat staatilist koormust iseloomustavad ajami koormustunnusjooned (joonis 3.1).
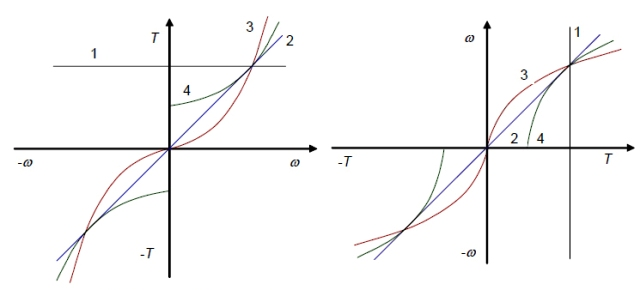
1 - koormus on konstantne; 2 - koormus on kiirusest lineaarselt sõltuv; 3 - koormus muutub võrdeliselt kiiruse ruuduga (koormuse ventilaatoritunnusjoon; 4 - koormuse konstantsele komponendile lisandub kiirusest sõltuv komponent
Momendi kiirusekõverad T(ω) ja pööratud teljestikus ω(T). Töömasina seisukohalt on primaarne kiirus, mis põhjustab koormusmomendi. Mootori seisukohalt on primaarne moment, mis tekitab pöörlemise ning järelikult ka kiiruse. Nendest eelistustest lähtudes valitakse ka tunnusjoonte esitusviis.
Dünaamilise koormuse puhul eristatakse konstantse (J = const) ja muutuva (J = var) inertsimomendiga koormust, kusjuures viimasel juhul võib inertsimoment olla nii kiiruse, mehhanismi asendi kui ka aja funktsioon.
Ülekandemehhanismid
Mootori võlli pöörlev liikumine edastatakse töömasinale ühendussiduri ja ülekande-mehhanismi kaudu. Viimast vajatakse juhul kui mootori võlli pöörlemiskiirus ja liikumise iseloom ei sobi töömasina tööorgani liikumisega. Ülekanne võib toimuda kas rööpsete võllide, samal tasandil ristuvate võllide või eri tasanditel asuvate ristuvate võllide vahel. Sõltuvalt sisend- ja väljundvõllide asetusest tuleb valida ka sobiva ehitusega ülekandemehhanism.
Ülekandemehhanismi iseloomustab sisend- ja väljundkiiruste suhe, mida nimetatakse ülekandesuheteks ehk ülekandearvuks:
u = ω1/ω2.
Mehhanism on kehade (lülide) tehissüsteem, mille ülesandeks on etteantud liikumisega keha (sisendlüli), liikumise teisendamine süsteemi teatava teise keha (väljundlüli) soovitud liikumiseks.
Etteantud liikumisega kehi (sisenlülisid) võib olla rohkem kui üks. Neid nimetatakse ka vedavaiks lülideks. Väljundlüli nim ka veetavaks lüliks.
Konstruktsioonitunnuste alusel liigitatakse mehhanismid järgmiselt:
- varbmehhanismid (väntmehhanism, väntnookurmehhanism, kulissmehhanism jne),
- hammasmehhanismid (hammas- ja tiguülekanded, diferentsiaal- ja planetaarmehhanismid, põrkmehhanismid, malta mehhanismid jt),
- hõõrdmehhanismid,
- kiilmehhanismid,
- kruvimehhanismid,
- nukkmehhanismid,
- painduvate lülidega mehhanismid (rihm-, kett- ja trossülekanded).
Hammasülekanne
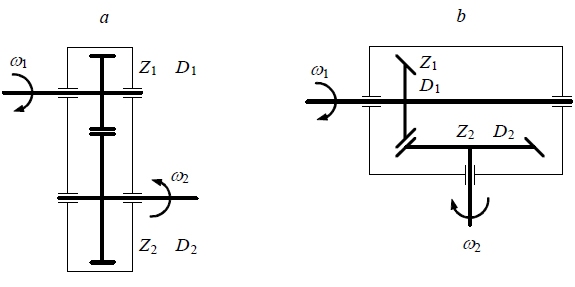
Hammasratastel põhinevaid pöörlemiskiirust vähendavaid ja pöördemomenti suurendavaid ülekandemehhanisme nimetatakse hammasreduktoriteks. Lihtsa üheastmelise hammasreduktori kinemaatikaskeem on näidatud joonisel 1. Eristatakse silinder- ja koonusratastega reduktoreid. Silinderratastega ehk silinderreduktorid on ette nähtud liikumise (momendi) ülekandeks rööpsete võllide vahel. Koonusratastega ehk koonusreduktoritega edastatakse liikumist (momenti) mitterööpsete sisend-väljundvõllide puhul. Kõige enam kasutatakse ristuvate võllidega koonusreduktoreid. Sõltuvalt hambuvate hammasrattapaaride arvust liigitatakse reduktoreid ühe- ja mitmeastmelisteks. Reduktori ülekandearvu saab leida nurkkiiruste, rataste läbimõõtude või hammaste arvu suhtena:
u=ω1/ω2=D2/D1=Z2/Z1,
kus u = ω1 on sisendkiirus, ω2 on väljundkiirus, D1 sisendratta läbimõõt, D2 väljundratta läbimõõt, Z12 sisendratta hammaste arv ja Z väljundratta hammaste arv. Üheastmelise reduktori ülekandearv on kuni 8, kaheastmelisel kuni 60 ja kolmeastmelisel kuni 250.
Allikas: Lehtla, T. Elektriajamid. Tallinna Tehnikaülikool, Elektriajamite ja jõuelektroonika instituut –Tallinn, 2007. 190 lk.
Hammasülekanne on tänu headele tehnilistele näitajaile, suurele töökindlusele, kompaktsusele ja universaalsusele levinuim ülekandetüüp.
Puudusteks võib lugeda suhteliselt keerukat valmistamise tehnoloogiat ja suurtel töökiirustel tekkivat müra.
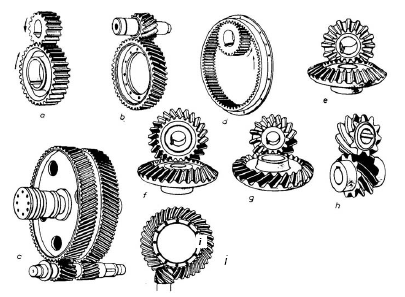
Liigitatakse rataste pöörlemistelgede asendi järgi:
- silindrilisteks - (teljed paralleelsed, joon. 2 a, b, c ja d),
- koonilisteks - (teljed lõikuvad, joon. 2 e, f ja g),
- kruviratastega - (teljed kiivsed, joon. 2 h) ning
- hüpoidülekanneteks (nihutatud telgedega kooniline ülekanne, joon. 2 i).
Enamik jõuülekannete rattaid valmistatakse terasest, harvem malmist või plastikuist.
Tavalist süsinikterasthinnalt aluseks võttes on madallegeeritud termotöödeldavad terased 1,6…1,8 korda ja kõrglegeeritud terased koguni 1,8…3 korda kallimad. Levinuimad (eriti masstootmisel) on teisena mainitud, termo- ja termodifusioon töötlusmeetodeid rakendada lubavad terasemargid.
Kõikidel mainitud juhtudel säilub hambal sitke löögikindel südamik ning pinnale tekitatakse kõva kulumiskindel “koorik”. Läbikarastusega hambaid nende hapruse tõttu kaasajal ei kasutata.
Real juhtumeil võib otstarbekaks osutuda normaliseeritud või parendatud süsinik-terastest (0,45… 0,7% C) hammasrataste kasutamine. Eelkõige siis, kui seadme mass ja gabariidid pole määratavad (näit. statsionaarsed ülekanded, abimehhanismid jms.); ehkki seadme mass suureneb 5…6 korda, langeb ära vajadus hambaid lihvida, vähenevad täpsusnõuded, hambad töötlevad end ise sisse ning kogu tootmisprotsess odavneb. Ka alaneb oluliselt koormus laagritele ja võllidele, sest jõud hambumises väheneb.
Mittemetallseid hammasrattaid kasutatakse peamiselt kodumasinates ja peenmehaanikaseadmetes, aga ka näit. tekstiili- ja polügraafiamasinates (juhul, kui tegemist on piiratud koormustega).
Positiivsed omadused: hea vibratsiooni- ja mürasumbuvus, kergus, korrosioonikindlus (kasutatavad näit. vees), hästi sissetöötuvad, kodumasinais ei vaja määrimist.
Negatiivsed omadused: madalad tugevusomadused, halvad soojusjuhid, suur joonpaisumistegur (eriti polüamiididel, kuumenedes kinnikiildumisoht), külmvoolavus (koormuse all seistes polüamiidhambad deformeeruvad).
Silinderreduktor
Allikas:hop giam toc phan foi cap nhanh.avi, http//www.youtube.com
Koonusreduktor
Allikas: Autodesk Invertor 11 Bevel Gear, http://www.youtube.com
Peale sirg- ja kaldhammastega silinderreduktorite (silinder and helical gear) ja koonusreduktorite (bevel gear and helical bevel gear) kasutatakse ka planetaarreduktoreid (planetar gear) ning tigureduktorid (worm gear).
Planetaarreduktoreid
Tigureduktor
Allikas: Worm Gear Speed Reducer, http://www. youtube.com
Silindrilist hambumist, mis on moodustatud hammasratast ja hammaslatist, nimetatakse silindriliseks latthambumiseks ja vastavat ülekannet hammas(ratas)-lattülekandeks.
Allikas: Solid Works rack & pinin motion study animation, http://www.youtube.com
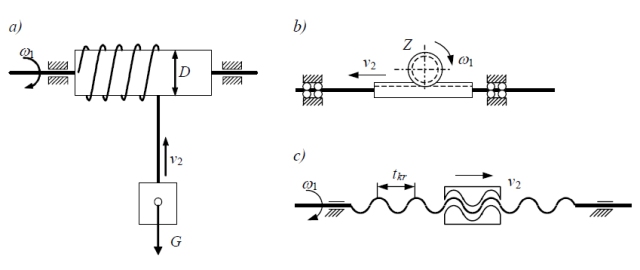
Sirgliikumise taandamisel pöördliikumiseks kasutatakse nn taandamisraadiust ρ, mis leitakse joonkiiruse ja nurkkiiruse suhtena. Sama tulemuse annab ka läbitud teepikkuse l ja pöördenurga ϕ suhe (joonis 3.4 a).
ρ=v2/ω1=l/ϕ=πD/2π=D/2
Allikas: Lehtla, T. Elektriajamid. Tallinna Tehnikaülikool, Elektriajamite ja jõuelektroonika instituut –Tallinn, 2007. 190 lk
Rihmülekanne
Lihtsamate elektriajamite puhul kasutatakse sageli hõõrdumisel põhinevaid rihmülekandeid, mis kuuluvad friktsioonmehhanismide hulka. Eristatakse kiil- ja lintrihmülekandeid (joonis 3.5). Rihmülekanne edastab ajami liikumist ühelt rihmarattalt teisele. Ideaalsel juhul arvutatakse ülekandetegur rihmarataste nurkkiiruste või diameetrite suhtena. Momendi ülekandmisel tekib rihmaratta ja rihma vahel libisemine, mistõttu rihmarataste nurkkiiruste suhe ei võrdu täpselt nende läbimõõtude suhtega. Suurem moment põhjustab ka suuremat libisemist ja suuremaid hõõrdekadusid ülekandes. Lisaks libisemisele omab ajami seisukohalt tähtsust rihma elastsus (rihm venib). Elastne rihm omab energia salvestamise võimet. Muutlikul koormusel võib rihma elastsus põhjustada ajamis kiiruse ja momendi võnkumisi.
Rihmülekande eriliigiks on hammasrihmülekanne, mille puhul rihma siseküljel olevad hambad on hambumises vedava ja veetava hammasrattaga. Tänu hambumisele ülekandes libisemist ei teki. Rihma elastsusega seotud probleemid on aga samad, mis tavaliste siledate rihmade puhul. Hammasrihmülekande eeliseks võrreldes muude ülekannetega on rihma väike mass ning võimalus edastada momenti suhteliselt kaugel asuvate rataste vahel.
Muudetava ülekandeteguriga ülekandeks on variaator. Toodetakse hõõrdketasvariaatoreid reguleerimispiirkonnaga u 1 : 5 ja kiilrihmvariaatoreid reguleerimispiirkonnaga u 1 : 8. Viimaste puhul muudetakse rihmaratta ja rihma puutediameetrit. Rihmaratta kooniliste külgpindade vahele surutud koonilise ristlõikega kiilrihm liigub rihmaratta külgede kokkusurumisel rihmaratta tsentrist eemale (raadius suureneb). Vastupidi, rihmaratta külgpindade teineteisest eemaldamisel vajub rihm sügavamale tsentri poole (raadius väheneb).

Allikas: http://wb6.itrademarket.com/pdimage/00/1910500_638px-keilriemen-v-belt.jpg
Allikas: http://2.imimg.com/data2/UR/XF/MY-3285111/power-transmission-rubber-belt-250x250.jpg
Rihmülekande eelised:
- müratu töö, tänu rihmade elastsusele dünaamilise koormuse sumbuvus;
- lihtne ja vähest ülesseadetäpsust vajav konstruktsioon;
- puudub määrimisvajadus, on praktiliselt hooldusvabad;
- võime läbilibisemisega kaitsta end ülekoormuse eest;
- võimalus käitada mitmeid, seejuures mitteparalleelseid võlle.
Puudused:
- suured gabariidid;
- suur võllide ja laagrite koormus;
- pidev ca 2% suurune libisemine rattail (v.a. hammasrihmad);
- tundlikkus töökeskkonna suhtes (temperatuur, niiskus, õli, bensiin, happed, tolm jms.);
- staatilise elektri tekke võimalikkus ja sellega seonduvad ohud.
Rihmülekanne variaatoriga
Allikas:Belt CVT animation, http://www.youtube.com
Variaatori ülekandetegur sõltub rihmarataste läbimõõtude suhtest: u=ω2/ω1=D2/D1
Allikas: Pro Engineer Piston Gear Cam Mechanism, http://www.youtube.com
Allikas:Cam, http://www.youtube.com/
Väntülekanne
Väntmehhanism on vändast, kepsust, liugurist ja kinnislülidest koosnev varbmehhanism, mille kinemaatiline ülesanne on vända pöörlemise muundamine liuguri translatoorseks edasi-tagasi liikumiseks või vastupidi. Väntmehhanismi ajamis (eriti selle lülide ühenduspunktides) toimuvad keerukad dünaamilised protsessid. Niisuguse ajamiga saab aga mehaaniliselt suure täpsusega realiseerida korduvaid liikumisi.
Allikas:Slider crank animation, http:www.youtube.com
Kettülekanne
Ülekande eelised:
- erinevalt rihmülekandeist puudub läbilibisemisvõimalus;
- võimalus ühe ketiga käitada mitut võlli;
- rihmülekandega võrreldes väiksem võllide ja laagrite koormus (tänu keti väikesele eelpingusele);
- võimalus kasutada kõrge temperatuuriga keskkonnas (näit. ahjude juures);
- ülekandeis, kus õlide sattumine tooteile pole lubatud (tekstiilitööstus, toiduainetetööstus, veealused ajamid) saab plastikelementidega kette kasutades loobuda määrdeõlidest.
Puudused:
- keti ebaühtlase kiirusega liikumine seoses nn. hulknurgaefektiga;
- ketiliigendite kulumisega kaasnev keti venimine ja sellest tulenev keti järelpingutuse vajadus ning ülekande kinnikiilumisoht;
- sobimatus perioodiliselt reversseeritavaiks ülekandeiks;
- sobiv ainult paralleelsete, võimalikult horisontaalsete võllide korral;
- keti võnkumine, eriti kui koormus on muutlik ja keti kiirus suur;
- võrreldes rihmülekandega tülikam hooldamine.
Allikas: Small engine animation, http://www.youtube.com
Hõõrdülekanne
Erinevalt rihmülekandeist puudub hõõrdülekandeis elastne vaheelement. Hõõre toimib kas otseselt vedava ja veetava lüli vahel või läbi kolmanda jäiga elemendi. Jagunevad püsiva ja muudetava ülekandearvuga ülekandeiks (variaatorid). Hõõrdülekande eelised:
- lihtne konstruktsioon, hõlbus koostamine ja hooldus;
- müratu töö (eriti mittemetalsete rataste korral);
- võimalus luua erinevaid, astmeteta muudetava ülekandearvuga variaaatoriskeeme.
Puudused:
- laagrite ja võllide suur koormus;
- suured kohalikud pinged hõõrderatastes seoses joon- ja punktkontaktiga nende vahel;
- piiratud ülekantav võimsus seoses ülekuumenemisohuga;
- suur elastne libisemine (eriti mittemetalseil rattail) ja sellest johtuv madal kasutegur.
Leiavad laialdast rakendamist aparaadiehituses, harvem masinais (näited: tööpinkides, sepistuspressides, konveieri ajameis).
Valik skeeme on toodud joonisel 1. Neist a, b ja d on püsiva ning c, e ja f varieeritava ülekandearvuga. Võrreldes skeemiga a vajab b kiildumis-efekti tõttu väiksemat rattaid kontakti suruvat jõudu, samal ajal tööpindu kulutav geomeetriline libisemine, sest kontaktpunktid omavad erinevat raadiust. Sama nähe tekib ka skeemide c, e ja f korral. Kõikidel ülekannetel (nagu rihm-ülekannetelgi) tekib koormamisel elastne libisemine, mis väljundvõlli nurkkiirust vähendab 1-2% võrra.
Allikas: Friction transmission with cylindrical rollers, http://www.youtube.com
Elektriajami mehaanika põhivõrrandid
Elektriajam on elektromehaaniline süsteem, milles samaaegselt toimuvad energia muundamisega seotud elektrilised ja mehaanilised protsessid. Mehaanilise koormuse muutumisel muutuvad mootori tarbitav vool ja võimsus ning vastupidi - mootori pinge, sageduse või mõne muu elektrilise parameetri (nt takistuse) muutumisel, muutub töömasina kiirus või pöördemoment.
Mootori tarbitav energia muundatakse mehaaniliseks energiaks mootori võllil. Lisaks kulub osa sellest ka muundamisega seotud kadudeks. Mootori mehaaniline võimsus kasutatakse töömasina käitamiseks, s.t. hoomasside kiirendamiseks ning staatiliste hõõrde ja takistusjõudude ületamiseks.
Erineva kiirustega pöörlevate (liikuvate) ajami osade (nt võllide) kogumõju arvestamiseks tuleb nii staatilised momendid (jõud, rõhud) kui ka inertsimomendid (hoomassid) taandada mingile kindlale liikumiskiirusele, nt mootori võlli pöörlemiskiirusele.
Kaod ülekandemehhanismides
Kaod ülekandemehhanismis sõltuvad mehhanismi tüübist. Hammasülekannete puhul on reduktori ühe astme kasutegur sõltuv nii ülekandearvust kui ka koormusest.
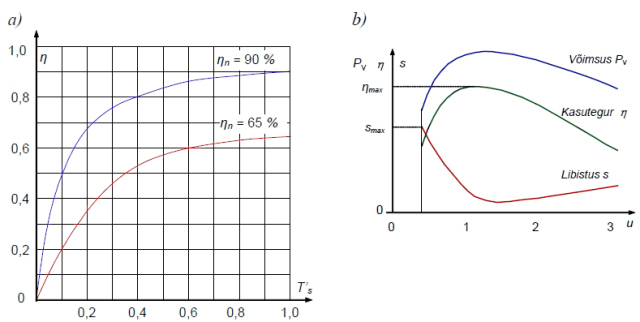
Ülekandemehhanismide kasuteguri väärtused nimikoormusel on esitatud vastavates kataloogides või mehhanismi tehnilistes dokumentides. Muutuva koormuse puhul tuleb arvestada ka kasuteguri muutumisega (joonis 3.6, a). Kuna kasuliku koormuse vähenemisel hakkab mehhanismi kasutegur vähenema, tuleb ajamites energia säästmiseks võimaluse korral vältida mehhanismide alakoormatud talitlust.
Variaatori ülekandearvuks loetakse väljund- ja sisendkiiruste suhet tühijooksul. Joonisel 3.6, b on näidatud variaatoriga ajami väljund-võimsuse Pv, libistuse s ja kasuteguri η katseandmetel põhinevad sõltuvused ülekandetegurist (kiirusest). Mitmesuguste mehaaniliste mõjurite, nagu rihmade ja hõõrdeketaste vahelise hõõrdumise ja pöörlemiskiiruse piirangu, samuti ka kiirusest sõltuva hõõrdeteguri tõttu on need sõltuvused mittelineaarsed. Tagamaks mehaanilise variaatoriga ajami optimaalset kasutamist, tuleb üksikasjalikult uurida ajami võimalikke talitlusviise.
Ülekandemehhanismi kasutegur on eriti oluline energia regenereerimisega ning piduritalitluses töötavate ajamite puhul. Võimsuste tasakaaluvõrrandid mootori- ja piduritalitluses:
Ts>ω=Tm·ωm·ηük
Ts<ω·ηük=Tm·ωm,
kus Ts> on staatiline moment mootoritalitluses, Ts< staatiline moment piduritalitluses, ω töömasina pöörlemiskiirus, ηük ülekandemehhanismi kasutegur, Tmmootori moment ja ωmmootori pöörlemiskiirus. Ülekande summaarne kasutegur ηük arvestab reduktori kasutegurit ηredkui ka muude ülekandemehhanismide (siduri, vända, kepsu jms.) kasutegurit ηmuud.
ηük =ηred·ηmuud.

{kind=link}
{kind=link}