
TÄITURID - ELEKTROMEHAANILISED TÄITURID
Asünkroonmootori tööpõhimõte
Asünkroonmootor on tööstuses kõige enam kasutatav elektrimootor, mis on tingitud eelkõige tema lihtsast konstruktsioonist. Asünkroonmootor koosneb paigalseisvast staatorist ning pöörlevast rootorist, mis on üksteise suhtes paigutatud nii, et nende vahel eksisteeriks õhupilu laiusega kuni 0,1…1 mm. Asünkroonmootori ehitus on näidatud Joonis 2.8.
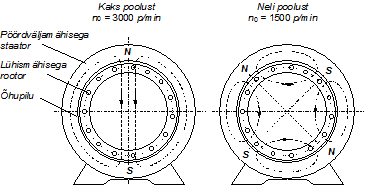 |
Joonis 2.9. Ühe ja kahe pooluspaariga lühisrootoriga asünkroonmootor
Asünkroonmootori staator koosneb mitmest vasktraadist mähisest, mis on üksteise suhtes ruumiliselt nihutatud ning mida toidetakse kolmefaasilisest elektrivõrgust. Mähised võivad olla ühendatud kas kolmnurka või tähte. Selline paigutus tekitab ümber staatori pöörleva magnetvälja, mis läbi õhupilu aheldub rootoris olevatel mähistel ning tekitab rootori elektrivoolu (elektromagnetilise induktsiooni nähtus). Vool tekitab rootoris omakorda magnetvälja, mille vastasmõjul staatori magnetväljaga tekkib jõud, mis paneb mootori pöörlema. Rootori pöörlemise kiirus sõltub magnetvälja pöörlemise kiirusest, mis omakorda sõltub mootori pooluspaaride arvust p ja toitesagedusest f. Joonis 2.9 on näidatud ühe ja kahe pooluspaariga lühisrootoriga asünkroonmootor, mille pooluspaaride arv on määratud staatori pooluspaaride arvuga.
a

b
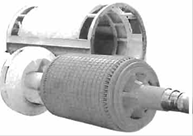
Joonis 2.10. Asünkroonmootorites kasutatavad rootorid. a – lühisrootor; b – faasirootor [24].
Tänapäeval kasutatakse põhiliselt faasi- ja lühisrootoriga asünkroonmootoreid. Faasirootoriga mootoris (slip ring rotor) muudetakse rootori kiirust takistuse muutmisega rootori ahelas kasutades selleks spetsiaalseid harjakesi, mis aga kuluvad kiiresti. Järjest enam leiab kasutust lühisrootoriga asünkroonmootor (squirrel cage), kus rootori mähised on omavahel lühistatud ning kogu elektrilise energia ülekanne toimub läbi õhupilu.
Staatori magnetvälja pöörlemise kiirust nimetatakse sünkroonkiiruseks, mis avaldub
![]()
kus ns on mootori sünkroonkiirus (p/min), f on toitepinge sagedus ning p on pooluspaaride arv. Nagu näha, sõltub magnetvälja pöörlemise kiirus ka pooluspaaride arvust. Mida suurem on pooluspaaride arv, seda väiksem on sünkroonkiirus, kuid suurem arendatav pöördemoment. Erinevatele pooluspaaride arvule vastavad välja sünkroonkiirused toitesagedusel 50 Hz on ära toodud Tabel 2.3.
Tabel 2.3. Pooluspaaride arvule vastavad sünkroonkiirused
| Pooluspaaride arv | Sünkroonkiirus p/min |
|---|---|
| 1 | 3000 |
| 2 | 1500 |
| 3 | 1000 |
| 4 | 750 |
| 5 | 600 |
Mootori pöörlemiskiirust võib anda ka pöörlemisnurkkiirusena ω, mis näitab mootori pöörlemiskiirust radiaanides sekundi kohta.
![]()
Asünkroonmootori tegelik pöörlemiskiirus on staatori magnetvälja pöörlemise kiirusest väiksem. Seda iseloomustab libistus s, mis näitab mootori pöörlemiskiiruse n erinevust sünkroonkiirusest ns ja avaldub
![]()
Koormuse suurenemisega suureneb ka libistus, mille väärtuseks on tavaliselt 1-5 %. (actuators raamat, sinine). Asünkroonmootori poolt arendatav nimipöördemoment M võllil on avaldatav
![]()
kus ωs on sünkroonnurkiirus ja Pmeh on mehaaniline võimsus mootori võllil, mis on antud mootori nimesildil.
Momendi mõjumisel hakkab mootor seisvast asendist ennast kiirendama kiirendusega ε, mis näitab pöörlemiskiiruse muutumise kiirust ning mõõdetakse radiaanidega sekundruudu kohta. Teades mootori kiirendust saab välja arvutada mootori käivitamise aja mõne pöörlemiskiiruseni.
![]()
Iga seadme töös esineb paratamatult kadusid st. osa elektrivõrgust tarbitud energiast kulub mootori soojenemiseks, jahutamiseks, magneetimiseks, hõõrdumiseks laagrites jm. Mootori efektiivsust, kasuliku töö ja kogu tarbitud energia suhet, iseloomustab kasutegur η.
![]()
kus Pmehon mehaaniline võimsus mootori võllil ja Pel mootori poolt tarbitav võimsus elektrivõrgust. Mida kõrgem on mootori kasutegur, seda rohkem tarbitud energiast läheb kasulikuks tööks. Elektrimootorite kasutegur jääb tavaliselt vahemikku 0,8...0,95.
Asünkroonmootori pöördemomendi sõltuvust pöörlemissagedusest iseloomustab tema mehaaniline tunnusjoon, mis on näidatud Joonis 2.11, a. Mootori käivitamiseks on vaja tekitada mootoris käivitusmoment, mis on mootori nimimomendist 1...3 korda suurem. Suurimat momenti, mida mootor käivitamisel saavutab nimetatakse vääratusmomendiks. Nimipöörlemiskiiruse saavutamisel, mis on libistuse s korda väiksem kui sünkroonkiirus, töötab mootor oma nimirežiimis (nimipöörlemiskiirusel ja nimimomendil). Asünkroonmootori tööpunkt võib sõltuvalt koormusest varieeruda lubatud libistuse piirides (2...8 %).
a |
b |
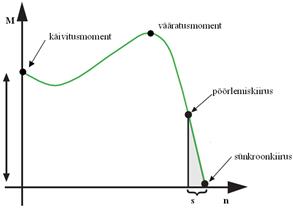
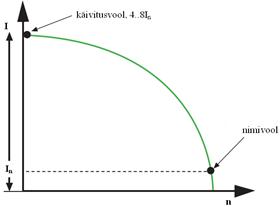
Joonis 2.11. Asünkroonmootori tunnusjooned otsevõrku käivitamisel. a – M/n tunnusjoon; b – I/n tunnusjoon [21]
Mootori lubatav ülekoormus momendi järgi on 1,6...1,8 korda suurem nimimomendist. Suurema koormusmomendi puhul võib mootor nö vääratuda (vääratusmoment). Sel juhul kiirus väheneb järsult ning mootori mähised hakkavad väga kiiresti kuumenema.
Joonis 2.11, b on näidatud voolu sõltuvust pöörlemiskiirusest. Nagu on näha, võib asünkroon-mootori otsevõrkkäivitusel käivitusvool olla nimivoolust In 4 ... 8 korda suurem.
Asünkroonmootori sildiandmed
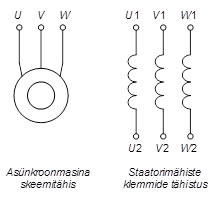
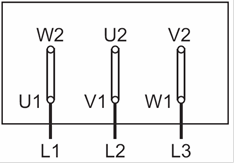
Igale mootorile on kere külge ühendatud seda mootorit iseloomustavad sildiandmed, millelt saab kasutaja välja lugeda, kuidas mootorit tuleb kasutada. Lühisrootoriga asünkroonmootori skeemitähis ja mähiste tähistamine on toodud Joonis 2.12. Samuti on ära märgitud mootori nimesildile kantavad olulisemad andmed.
Joonis 2.12. Lühisrootoriga asünkroonmootori skeemitähis ja mähiste tähistamine [21]. |
Asünkroonmasina sildiandmed Tootja nimi Mootori tüüp, sarjanumber Nimivõimsus Pn Nimipinge ja mähiste lülitus Un Sünkroonkiirus (pooluste arv) n0 Nimilibistus sn Nimikasutegur hn Nimivõimsustegur jn |
Asünkroonmootori ühendamine toiteallikaga
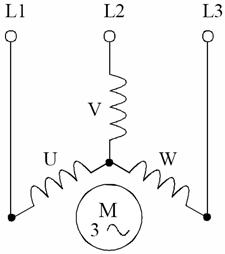
1. Tähtühendus
Tähtühenduse korral on mootori mähised ühendatud nii, et kolme mähise lõpud on omavahel ühes punktis kokku ühendatud. Seda punkti nimetatakse nullpunktiks. Mähiste algused on ühendatud toitesüsteemiga. Tähtühendust tähistatakse sümboliga Y. Tähtühendus on illustreeritud Joonis 2.13.
a |
b |
Joonis 13. Asünkroonmootori tähtühendus. (a) skemaatiline tähistus; (b) toitekaabli ühendamine mootori klemmidele. |
|
Tähtühenduse korral kehtivad järgmised elektrilised seosed:
![]() – faasivool on võrdne liinivooluga.
– faasivool on võrdne liinivooluga.
![]() – liinipinge on faasipingest teguri
– liinipinge on faasipingest teguri ![]() korda suurem
korda suurem
![]() – näivvõimsus
– näivvõimsus
![]() – aktiivvõimsus
– aktiivvõimsus
![]() – reaktiivvõimsus
– reaktiivvõimsus
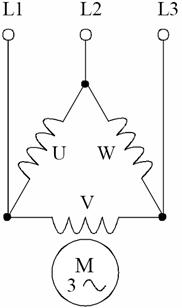
2.Kolmnurkühendus
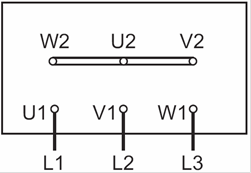
Kolmnurkühenduse korral on mootori mähised ühendatud nii, et ühe mähise algus on ühendatud teise mähise lõpuga. Nende mähiste ühenduspunktid on ühendatud toitesüsteemiga, mida illustreerib Joonis 2.14. Tähtühendust tähistatakse sümboliga Δ.
a |
b |
Joonis 2.14. Asünkroonmootori kolmnurkühendus. (a) skemaatiline tähistus; (b) toitekaabli ühendamine mootori klemmidele. |
|
Kolmunrkühenduse korral kehtivad järgmised elektrilised seosed:
![]() –
faasivool on liinivoolust teguri
–
faasivool on liinivoolust teguri ![]() korda
suurem.
korda
suurem.
![]() –
liinipinge on faasipingega võrdne.
–
liinipinge on faasipingega võrdne.
![]() –
näivvõimsus
–
näivvõimsus
![]() –
aktiivvõimsus
–
aktiivvõimsus
![]() –
reaktiivvõimsus
–
reaktiivvõimsus
Kolmnurka ühendatud mootor tarbib võrgust 3 korda suuremat võimsust, kui samasse võrku ühendatud tähtühenduse korral. Kolmnurka tohib ühendada mootoreid vaid sellisel juhul, kui mootori mähised vastava pinge ja voolude jaoks ette nähtud on.
Mootori ühendamisel tuleb tähelepanu pöörata mootori sildiandmetele ja mootori ühendamise viisile. Kui mootori sildiandmetel on kirjas Δ/Y 230 / 400 V, siis tohib Euroopa elektrivõrgus liinipingega 400 V mootorit ühendada ainult tähte. Tähte ühendamisel langeb igale mähisele pinge 230 V, kolmnurka ühendamise puhul aga 400 V, mis põhjustab suuri voolusid ning võib viia mootori ülekuumenemise ja riknemiseni. Sellist mootorit tohib ühendada kolmnurka ainult kolmefaasilisse võrku liinipingega 230 V, mis võib olla saavutatud näiteks trafo abiga. Kui mootori sildiandmetel on kirjas Δ/Y 400 / 690 V, siis tuleb mootorit samasse toitevõrku optimaalse töö tagamiseks ühendada kolmnurka, sest siis langeb igale mähisele pinge 400 V. Kui ühendada see mootor tähtühendusse langeb mähistele aga pinge 230 V ning mootori ressurss ei ole optimaalselt ära kasutatud. Sellist mootorit tohib ühendada tähte mõnda tööstuslikku elektrivõrku, kus on kolmefaasiline toide liinipingega 690 V.
Arvutusülesanne I
Kolmefaasilisel lühisrootoriga asünkroonmootoril, mille staatorimähised on ühendatud kolmnurka, on järgmised sildiandmed. Mootor on ühendatud 3- faasilisse toitevõrku liinipingega 400 V ja sagedusega 50 Hz. (a) Arvutada otsitavad suurused mootori töötamisel nimivõimsusel. (b) Kuidas muutuvad võrgust tarbitavad võimsused, kui samasugune mootor on ühendatud samasse toitevõrku aga tähte?
Sildiandmed |
Otsitavad suurused |
|---|---|
võimsus Pmeh = 5,5 kW pinge U = 400/ 690 V Δ/ Y vool I = 11/ 6,4 A Δ/ Y sagedus f = 50 Hz pöörlemiskiirus n = 1460 min-1 võimsustegur cos φ = 0,84 |
Võimsused S, P, Q kasutegur η pooluspaaride arv p libistus s võllil arendatav moment M tarbitav energia 1,5 h jooksul elektrienergia hind, kui 1 kWh maksab 1,60 EEK |
Lahendus (a):
Võrgust tarbitav koguvõimsus
![]() VA
VA
Võrgust tarbitav aktiivvõimsus
![]() W
W
Võrgust tarbitav reaktiivvõimsus
![]() var
var
Kasutegur
![]()
Pooluspaaride arv
![]()
Kuigi staatorivool on nimisildil antud, võib selle läbi teiste parameetrite arvutada ka
![]() A
A
Libistus ehk kiiruse erinevus staatorvälja ja rootori pöörlemiskiiruse vahel.
![]()
Võllil arendatav moment
![]() Nm
Nm
Tarbitav aktiivenergia 1,5 h jooksul
![]() Wh
Wh ![]() kWh
kWh
Elektrienergia hind
![]() EEK
EEK
Lahendus (b):
Tähtühenduse korral langeb ühele mähisele väiksem pinge
![]() V
V
Et arvutada sellisel pingel mähiseid läbivat voolu, peame esmalt määrama ära ühe faasi takistuse. Kuna tähtühenduses on liinivool võrdne faasivooluga, milleks nimirežiimil on 6,4 A, ning ühele mähisele langeb pinge 400 V siis saame, et
![]() Ω
Ω
Faasi ja liinivoolu väärtuseks kujuneb Ohmi seaduse järgi, pinge 230 V juures
![]() A
A
Näivvõimsus on seega
![]() VA
VA
Nüüd võrreldes tarbitud võimsust täht- ja kolmnurkühenduses saame, et kolmnurkühenduses arendab mootor (ja tarbib seega võrgust) 3 korda suuremat võimsust.
![]()
Generaatori ja mootori talitlus
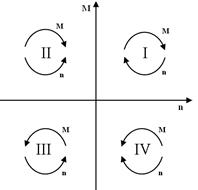
Elektriajami töös võib muutuda mootori pöörlemiskiirus, koormusmoment ning teatud juhtudel ka pöörlemissuund. Kui elektrimasin muundab elektrilist energiat mehaaniliseks, siis töötab ta mootori režiimis. Kui elektrimasin muundab mehaanilist energiat elektriliseks, siis töötab ta generaatori režiimis. Sõltuvalt režiimist jaotatakse mootori tööd nelja nö kvandrandi vahel (vt. Joonis 2.15). Mootoritalituse korral toimivad mootori moment ja pöörlemiskiirus ühes suunas (kvadrandid I ja III, Joonis 2.15). Näiteks koormuse tõstmisel tuleb mootorile rakendada moment, mis on mootori pöörlemisega samasuunaline. Generaatoritalituse korral toimivad mootori moment ja pöörlemiskiirus vastassuundades (kvadrandid II ja IV, Joonis 2.15). Näiteks kraana koormuse langetamisel teeb tööd gravitatsioonijõud ning mootor peab töötama sellele vastu, et koormust mitte liiga kiiresti alla lasta st pidurdama. See tähendab, et kuigi mootor pöörleb ühes suunas, peab talle vastu mõjuma pidurdusmoment. Koormuse langetamisel muundatakse mehaaniline energia elektriliseks.
Lühidalt, mootori generaatoritalitlust võivad ajamis põhjustada alljärgnevad tingimused.
Mootorit käitab töömasin (näiteks auruturbiin, sisepõlemismootor) st kiiruse suurenemisel üle sünkroonkiiruse arendab mootor töömasinat pidurdavat generaatormomenti.
Mootorit pidurdatakse rekuperatiivpidurdusega st ajamit peatatakse konstantse momendiga.
Joonis 2.15. Elektriajami momendi-kiiruse neli kvadranti [21].
Lihtsamad ajamid töötavad tavaliselt I kvadrandis (mootoritalituses), mõnedel ajamitel on pöörlemissuund muutumatu, kuid muutub momendi suund (nt kiirendamisel ja pidurdamisel). Samuti esineb olukordi, kus elektriajam töötab muutumatu suunaga momendiga, aga muutub mootori pöörlemissuund (nt koormuse tõstmisel ja langetamisel). Kui elektriajam on varustatud vastava muunduriga, siis võib ta talitada kõigis neljas kvadrandis.
Asünkroonmootori käivitamine
Asünkroonmootori käivitus on eriti problemaatiline suurematel võimsustel. Mootori staatorivool ulatub käivituse ajal kuni 7-kordse nimivooluni. Võimsate asünkroonmootorite otsevõrkukäivitus (direct on-line, DOL) põhjustab elektriliinides suuri voolutõukeid. Lisagem, et mootori käivitusvoolu tugevus ei sõltu koormusest ning on igal mootoril kindel suurus. See on antud mootori sildil nimi-käivitusvoolukordsusena Ikäiv/In, mis on tavaliselt 4...7. Pikkade liinide ja suure sisetakistusega võrkude korral põhjustab võimsa mootori käivitus ajutiselt teiste elektritarvitite pinge olulist vähenemist. Seejuures on asünkroonmootori käivitusmoment, võrreldes alalisvoolumootoriga, suhteliselt väike, mistõttu suure koormuse ja inertsimomendi, s.o raske käivituse, puhul venib käivitusprotsess pikaks. See asjaolu põhjustab omakorda mootori mähiste olulist kuumenemist käivitusprotsessis ning sobiva kaitse puudumisel tekib oht mähise isolatsioonile. [21]
Lühisrootoriga asünkroonmootori käivitamiseks on mitu võimalust:
Otsevõrkkäivitus on kõige lihtsam käivitusmeetod, mille puhul ühendatakse mootor otse võrku, tavaliselt läbi pealüliti ja ülekoormuskaitse. Meetod on lihtne, ega vaja mingeid keerukaid juhtimissüsteeme, kuid kutsub esile kõige suuremat käivitusvoolu, mis võib olla kuni 8 korda suurem mootori nimivoolust. Kuna mootor pole algselt pingestatud, siis tegelik vooluimpulss võib olla kuni 14 korda suurem nimivoolust. Lisaks suurele käivitusvoolule on vajalik ka suur käivitusmoment, mis on mitu korda kõrgem kui nimitalitluseks vaja ja kutsub seega esile ebavajalikke jõude ja pingeid mehaanilistes ülekannetes. Sellele vaatamata kasutatakse seda meetodit lihtsuse pärast väga laialt. Otsevõrkkäivituse mehaaniline tunnusjoon on toodud joonisel Joonis 2.11.
Täht-kolmnurkkäivituse meetodiga on võimalik vähendada käivitusvoolu (kuni 30 %) ja käivitusmomenti (kuni 25 %). Juhtseade koosneb lülitisti, liigkoormuskaitsest ja timerist, kus on programmeeritud aeg täht- kolmnurga ümberlülituseks. Mootorit käivitatakse alguses tähtühenduses (tähtühenduses jooksevad mootoris väiksemad voolud) ning lülitatakse hiljem kolmnurka. Mootor peab eelnevalt olema ühendatud kolmnurka. Kui mootor on paigalseisus raskelt koormatud, ei sobi see meetod mootori käivitamiseks. Selline meetod sobib aga ventilaatorite ja pumpade käivitamiseks.
Käivitamine sujuvkäivitiga on võimalik tänu jõuelektroonikale, kus kasutatakse vahelduvpingeregulaatorit pinge efektiivväärtuse sujuvaks tõstmiseks, mis vähendab käivitusvoolu ja momenti. Asünkroonmootori käivitamine sujuvkäivitiga on lähemalt käsitletud punktis 2.7.
Käivitamine sagedusmuunduriga on kõige paremaks viisiks mootori käivitamiseks ning pöörlemiskiiruse reguleerimiseks. Tänapäeval on sagedusjuhtimisega vahelduvvooluajam leidnud kasutust peaaegu kõigil aladel, kus traditsiooniliselt rakendati alalisvooluajamit. Asünkroonmootori käivitamine sagedusmuunduriga on lähemalt käsitletud punktis 2.6.
Tabel 2.4 kirjeldab kõikide eespool mainitud käivitusmeetodite kasutamise iseärasusi ja probleeme asünkroonmootori käivitamisel ja pidurdamisel.
Tabel 2.4. Erinevate Käivitusmeetoditega kaasnevad probleemid mootorite käivitamisel ja pidurdamisel [21]
Probleem |
Otsevõrkkäivitus |
Täht-kolmnurk-käivitus |
Sagedusmuundur |
Sujuvkäiviti |
|---|---|---|---|---|
Rihma libisemine / kulumine laagritel |
Jah |
Keskmine |
Ei |
Ei |
Suur käivitusvool |
Jah |
Ei |
Ei |
Ei |
Ülekandemehhanismi suur kulumine |
Jah |
Jah |
Ei |
Ei |
Kauba kahjustamine pidurdamisel |
Jah |
Jah |
Ei |
Ei |
Hüdraulilised löögid pidurdamisel |
Jah |
Jah |
Ei, parim lahendus |
Jah, vähendatud |
Transmissioon peaks |
Jah |
Jah |
Ei |
Ei |
Tabelist selgub, et otsevõrkkäivitus on kogu süsteemi mehaanika jaoks kõige probleemirikkam, samuti ka täht-kolmnurkkäivitus. Parimateks lahendusteks on käivitamine sagedusmuunduri- või sujuvkäivitiga.
Asünkroonmootori pidurdamine
Elektriline pidurdus kujutab endast talitlusviisi, kus mootori poolt toodetud energia tagastatakse ümbritsevasse keskkonda. Mootori pöördemoment mõjub sel juhul liikumist takistavalt (masin töötab generaatori talitluses, vt. pt.2.5.5). Selline talitlus esineb juhtudel, kus koormus järsult aeglustub või peatub, näiteks koormuse langetamisel. Kui koormuse inerts on suur, tuleb sellega arvestada juhul, kui mootorit on tarvis täiskiiruselt kiiresti peatada. Kuna pidurdamiseks on vajalik täiendav moment, siis tuleb pidruduse vältel koormuse energia hajutada. Ajamis salvestub kahte tüüpi energiat, mis tuleb pidurduse vältel hajutada:
a) Inertsi või kineetiline energia, põhiliselt pöörlevates ja lineaarmasinates, mis avaldub sirgjooneliselt liikuva keha puhul
![]()
kus m on keha mass ja v on sirgliikumise kiirus. Pöörleva keha puhul
![]()
kus J on keha inertsimoment ja ω on nurkkiirus.
b) Potentsiaalne energia, põhiliselt liftides ja tõstukites, mis võivad liikuda ühtlaselt ja kiireneda aeglaselt. Pidurdamisel tuleb rakendada kogu võimsust, et hoida kiirus muutumatuna, kui koormus langeb. Ajamis salvestunud potentsiaalne energia avaldub
![]()
kus m on keha mass, g on Maa raskuskiirendus ja h on kõrgus maapinnast.
Võimsuskaod elektriajamis, mehaaniline takistus ja kaod ülekandemehhanismis tulevad aeglustamisel kasuks, kuna need vähendavad nõutavat pidurdusvõimsust (pratatamatult põhjustavad seal energia hajumist nt soojusena). Regenereeritud potentsiaalne energia sõltub maksimaalsest võimsusest ja väljajooksu ning peatumiskestusest.
Ajal, mil mootor pidurdab muundatakse mehaaniline energia (kineetiline või potentsiaalne) elektrienergiaks ning parimaks võimaluseks oleks see energia tagastada toitevõrku. Energiat saab hajutada ainult siis, kui energial on nö kuhu minna. Võimaldamaks mootori aeglustamist, tuleb energia hajutada, mida võib teha seda energiat salvestades või muundades teiseks energialiigiks. Selleks on mitu võimalust [23].
- Võimalik on tagastada elektrienergiat toitevõrku, kus see energia tarbitakse ära teiste võrku ühendatud tarbijate poolt seda nimetatakse elektrienergia rekuperatsiooniks.
- Elektrienergia muundada soojuseks, lastes elektrivoolul kulgeda läbi pidurdustakisti (elektrivoolu läbimisel läbi aktiivtakisti eraldub soojusenergiat).
- Energiavahetus mitmemootorilistes rakendustes (pidrudusenergiaga toidetakse teisi sama muunduriga ühendatud mootoreid)
- Dünaamiline pidurdus, kus koormuse kineetiline energia muundatakse soojuseks mootoris endas.
Elektrienergia rekuperatsiooni peamiseks eeliseks on elektrienergia saadavus kõigile samasse võrku ühendatud seadmetele. Kuna aga selline lahendus on kallim ning suurendab muunduri massi ja mõõtmeid, siis on see otstarbekas suurte võimsuste puhul nt elektrirongides, suurtes kraanades.
Dünaamiline pidurduse puhul ei tagastata elektrienergiat toitevõrku, vaid antakse kogu mootori pöörlemisel tekkiv energia ära pidurdustakistisse, kus see muundatakse ära soojuseks.
Alalisvoolupidurdus on kõige lihtsam pidurdusviis. Alalisvoolupidurduse korral lahutatakse mootor toitevõrgust ning mähistesse juhitakse alalisvool. Alalisvoolu läbilaskmisel läbi mootori mähiste tekitatakse staatoris paigalseisev magnetväli, mis tekitab rootoris pidurdus- ja hoidemomendi. Sel ajal energiat võrku tagasi ei anta. Alalisvooluga pidurdamisel ei ole võimalik määrata mootori pidurdusaega, kuna pinge sagedus on võrdne nulliga (alalisvoolu puhul f = 0 Hz), mis tähendab, et puudub mootori kiiruse juhtimine. Rootorile mõjub sujuv pidurdusmoment ning seetõttu kasutatakse rootori pidurdamiseks ja seisval rootoril pidurdusmomendi hoidmiseks alalisvoolupidurdust lühikeste ajavahemike vältel. Sagedane alalisvoolupidurdus võib põhjustada mootori liigkuumenemist ning seetõttu on soovitav kasutada selleks vajalikke kaitseseadmeid.
Aga loomulikult võib ajami peatumine toimuda ka vaba väljajooksu või aeglustusrambiga. Vaba väljajooksu puhul katkestatakse mootoril toide ning jäetakse mootor jooksma kuni koormus ja hõõrdejõud teda ei peata. Aeglustusrambi puhul aeglustatakse mootori kiirust sageduse vähendamisega kuni pidurdussageduseni ja rakendatakse seejärel dünaamilist pidurdust. Pidurdussageduseks loetakse sagedust, millest allpool rakendatakse mootori dünaamilist pidurdust [25].
Arvutusülesanne II
Kolmefaasiline asünkroonmootor kiireneb nimikoormusel 1,5 sekundiga pöörlemiskiiruseni n = 2850 p/min. Määrata mootori pooluspaaride arv p, libistus s, nurkkiirus ω ning nurkkiirendus ε. Kui suur peab olema staatorivälja pöörlemise kiirus, et rootori pöörlemiskiirus oleks n = 1000 p/min?
Lahendus:
On ilmselge, et mootori sünkroonpöörlemiskiirus on 3000 p/min. Tabel 2.3 näitab, et mootoril on 1 pooluspaar.
![]()
Mootori libistus avaldub
![]()
Mootori nurkkiirus
![]() s-1
s-1
Mootori nurkkiirendus
![]() s-2
s-2
Selleks, et rootori pöörlemiskiirus oleks n = 1000 p/min peab staatorvälja pöörlemise kiirus olema libistuse võrra suurem.
![]() p/min
p/min
