
Sissejuhatus tööstuslikesse sidevõrkudesse
Sissejuhatus tööstuslikesse sidevõrkudesse; Sidevõrk; Võrgutopoloogiad ja mudelid
Sissejuhatus tööstuslikesse sidevõrkudesse
Kaasaegsete tootmissüsteemide eriomadused
Kaasaegsetel tootmis-, transpordi- ja sidesüsteemidel on üks ühine eriomadus; kõik hõlmavad keerukat hierarhilist struktuuri, mis on ehitatud hulgast seotud ja vastastikku toimivatest alamsüsteemidest. Ulatusliku funktsionaalsuse ja kõrge jõudlusega alamsüsteemide saavutamine eeldab integreeritud süsteemide arendamist tootmise juhtimiseks. Iga tootmissüsteemi omakorda saab esitada kui kolmetasandilist hierarhiamudelit. Kõige madalamale hiearhiatasandile kuuluvad süsteemid individuaalsetes masinates, seadmetes ja tegevmehhanismides toimuvate protsesside automaatseks reaalajaliseks juhtimiseks. Teine tase seob esimese taseme süsteemid territoriaalse/tootmisprintsiibi alusel operatiivse/administratiivse iseloomuga ülesannete täideviimise eesmärgil. Kolmas tasand hõlmab juhtimistegevustega seotud süsteeme, mis kuuluvad majanduse ja organisatsioonilise tegevuse valdkonda.
Sidesüsteemide arhitektuur
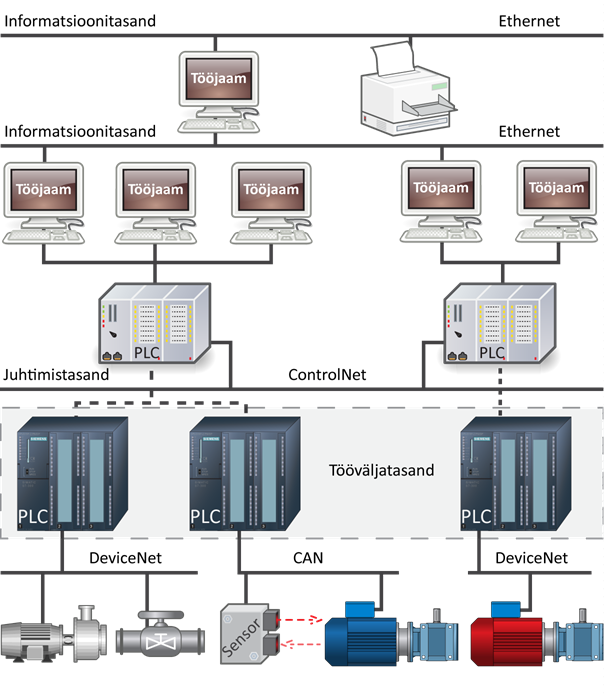
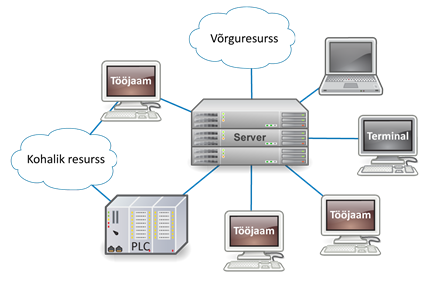
Kaasagsete tootmissüsteemide struktuuri iseloomulikud omadused mõjutavad sidesüsteemide arhitektuuri. Sidesüsteeme arendatakse kolmetasandiliste hierarhiliste heterogeensete arvutivõrkude põhjal (Joonis 1.1):
- Informatsiooni tasand: põhivõrk;
- Juhtimistasand: tootevalmistuse juhtimiseks mõeldud võrgud, mis hõlmavad seirearvuteid ja tööjaamu;
- Tööväljatasand: sidevõrgud koos programmeeritavate loogikakontrollerite, andurite ja täituritega.
Kaasaegsete sidesüsteemide iseloomulikud tunnused
Kaasaegsed sidevõrgud kasutavad erinevaid side edastusvahendeid nagu kaabliühendused, valguskiud, raadioühendused, infrapuna kiired jne. Hiljuti on koos sideliideste hinna langemisega hakatud arendama erinevaid vastastikku täiendavate funktsioonidega võrguarhitektuure. See kõik loob sobivad tingimused heterogeensete tööstussüsteemide ehitamiseks, mille juhtimisfunktsioonide eripäraks on globaliseerumine.
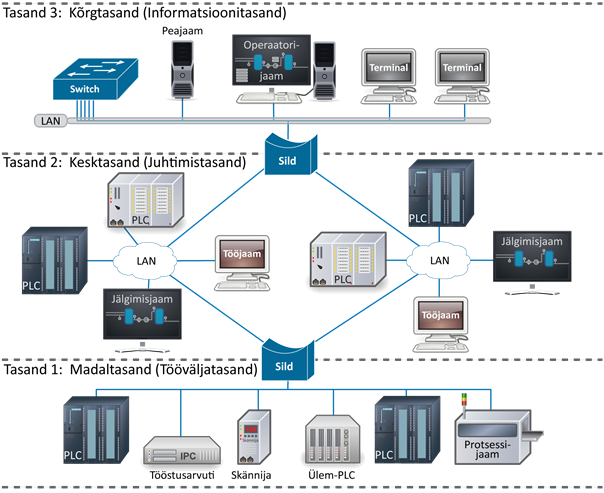
Joonis 1. 1. Kaasaegsete sidesüsteem
Hajusjuhtimissüsteemid
Hajusjuhtimissüsteem (distributed control systems, DCS) on peamine alamsüsteem tootmise juhtimiseks. Hajusjuhtimissüsteeme on kahte põhitüüpi: vertikaalselt integreeritud ja horisontaalselt integreeritud.
Detsentraliseeritud vertikaalselt integreeritud hajusjuhtimissüsteemi arhitektuurid I
Antud süsteeme iseloomustab vertikaalne hierarhiline ülesehitus ja vertikaalne infovahetus erinevate hierarhiatasemete vahel (Joonis. 1.2).
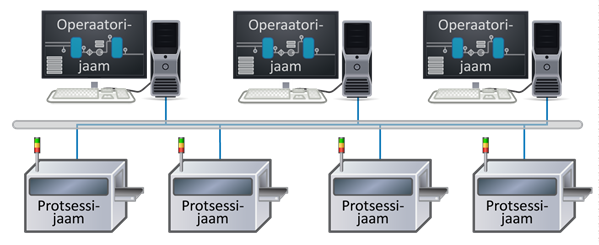
Joonis 1. 2. Detsentraliseeritud vertikaalselt integreeritud hajusjuhtimissüsteemi arhitektuur [64]
Alamsüsteemid (kontrollerid, andmekogumisseadmed, seirearvutid , operaatorjaamad) on tegelikult iseseisvad hajusjuhtimissüsteemi komponendid, mis toimivad vastastikku, vahetades intervallide kaupa võrgus informatsiooni. Sellist tüüpi hajusjuhtimissüsteemide põhisuunaks on üleminek avatud arhitektuurile, mis baseerub võrgustandarditele ja protokollidele nagu Ethernet koos TCP/IPga ja tegevmeediumidel, mis toetavad kasutaja-serveri vahelist infovahetust hajusjuhtimissüsteemide alamsüsteemide vahel.
Detsentraliseeritud vertikaalselt integreeritud hajusjuhtimissüsteemi arhitektuurid II
Seda konkreetset hajusjuhtimissüsteemi tüüpi iseloomustab kõrge detsentraliseerimistase (Joonis 1.3) ja spetsiaalsete funktsioonidega seadmete kasutamine. Hajusjuhtimissüsteem koosneb lihtsatest kontrolleritest, mis baseeruvad ühekiibilistel mikroarvutitel, ja tööjaamaks konstrueeritud arvutist.
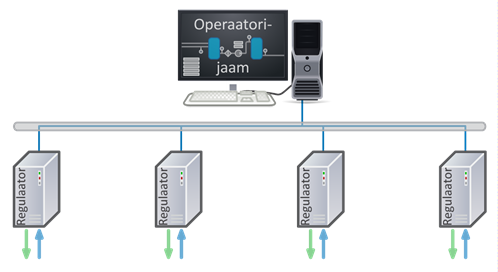
Joonis 1. 3. Detsentraliseeritud vertikaalselt integreeritud hajusjuhtimissüsteemi arhitektuur [64]
Horisontaalselt integreeritud hajusjuhtimissüsteemi arhitektuurid
Horisontaalselt integreeritud arhitektuurid võimaldavad hajusjuhtimissüsteemi alamsüsteemide vahel nii vertikaalset kui horisontaalset infovahetust. Selle arhitektuuriklassi põhiomaduseks on kaugsisendi ja -väljundiga süsteemid, kus mikroprotsessor kontrollerid on kärbitud intelligentseteks sisend/väljund-seadmeteks, samal ajal kui juhtimisfunktsioone täidab tööjaama rolli täitev arvuti (Joonis 1.4).
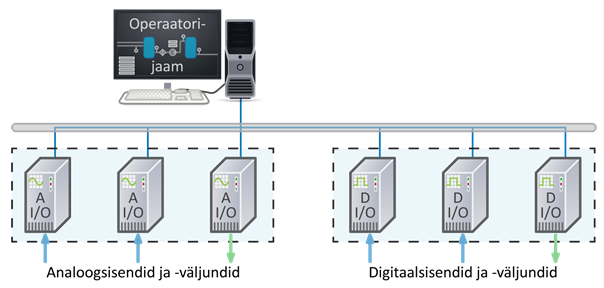
Joonis 1. 4. Horisontaalselt integreeritud hajusjuhtimissüsteemi arhitektuur [64]
Horisontaalselt integreeritud süsteemid, mis koosnevad töövälja võrkudest, on viimastel aastatel saanud üha kasvava tähelepanu osaliseks.
Juhtimissüsteemide struktuuri aluseks olevaid arvutivõrkusid, mis sisaldavad intelligentseid üksusi nagu regulaatorid, programmeeritavaid kontrollerid, intelligentsed sensorid, täiturid jne, nimetatakse töövälja võrkudeks.
Võrgusidega automaatsed juhtimissüsteemid
Võrgusidega automaatsed juhtimissüsteemid (automatic control systems with network communication, ACSNC) on süsteemid, milles juht- ja terminalüksused (sensorid, muundurid, detektorid, täiturid, juhtelemendid, automaatsed kontrollerid, tööjaamad jne) on ühendatud kindlasse andmeside võrku. Iga selline üksus esindab ühte sõlme (jaama) konkreetses võrgus ja suhtleb teiste üksustega võrgumeediumi kaudu.
Võrgusidega jaotusvõrkude funktsionaalne jaotamine
Funktsionaalsest vaatenurgast jagunevad võrgusidet võimaldavad juhtimissüsteemid kolmele tasemele:
Töövälja tasandi süsteemid
Need on ehitatud töövälja võrkudest programmeeritavate kontrollerite (programmable logic controllers, PLC) ja intelligentsete terminaliüksuste (sensorid, mõõteseadmed, täiturid, jne) vaheliseks sideks. Need süsteemid kasutavad selliseid tööväljaprotokolle nagu DeviceNet, CAN, Foundation Fieldbus, Profibus-DP jne. Töövälja võrgud on aluseks võrgusidega juhtimissüsteemide hierarhiale (Joonis 1.5). Neid kasutatakse katkematute tootmisprotsesside, juhtelementide, kontrollerite, andurite ja teiste tootmisprotsessis kasutatavate üksuste juhtimiseks.
Töövälja võrkudel on tavastruktuuride ees mitmed eelised:
- Nad tagavad suurema andmeturvalisuse, kaasates juhtimisinformatsiooni;
- Võimaldavad suuremat täpsust andmete ülekandel, kuna rakendavad täielikult digitaalset sidet;
- Mitmevariandiline ligipääsuvõimalus, mille puhul kasutatakse detektoreid erinevate protsessiparameetrite lugemiseks;
- Võimalus kaugkonJoonisureerimiseks ja võrguüksuste diagnostikaks.
Juhtimistasandi süsteemid
Need koosnevad programmeeritavatest kontrolleritest (PLC) kohalikes deterministliku loomuga võrkudes.

Joonis 1. 5. Juhtimistasandi süsteem [64]
Selle tasandi süsteemid võimaldavad reaalajalist protsesside juhtimist ning erinevat tüüpi programmeeritavate kontrollerite, tööjaamade, arvutite, programmi- ja diagnostikaüksuste vastastikust toimimist. Sellele tasandile kuuluvad võrgud on oma olemuselt jadakommunikatsiooni süsteemid, mis tõhustavad ühendust üksuste vahel, mis vahetavad rakendatud informatsiooni kindlaksmääratud eeldefineeritud viisil. Nende eesmärgiks on hõlbustada tehnoloogiaprogrammide vahetamist, koordineerida ja juhtida programmeeritavate kontrollerite vahelist informatsioonivahetust. Võrgud peavad olema vastavuses neile esitatud standardnõuetele andmeülekande mahu, turvalisuse, kiiruse, müratakistuse ja reaalaja operatsioonide ettemääratuse osas.
Informatsioonitasandi süsteemid
Informatsioonitasandi süsteeme kasutatakse juhtimiseks ja informatsiooni vahetamiseks ettevõtte tasandil; nende eesmärgiks on lahendada ettevõtte haldamise peamisi ülesanded. Nende süsteemide üldiseks olemuslikuks probleemiks on ülekantud informatsiooni hulk, ülekande kiirus, turvalisus ja kaitse autoriseerimata ligipääsu eest. Selle tasandi kaasaegsed süsteemid kasutavad laialdaselt Ethernetina tuntud spetsifikatsiooni (Joonis 1.6). Selle tasandi võrkudele on omane tihe suurte andmemahtude (massiivide) vahetamine. Erinevalt enamusest konkureerivatest tehnoloogiatest on selle eeliseks regulaarne hindade alanemine.
Joonis.1. 6. Informatsioonitasandi süsteem [64]
Sidevõrk
Võrk koosneb kahest või rohkemast seadmest, mis on ühendatud üksteisega riist- ja tarkvaratööriistade abil, võimaldades neil vahetada informatsiooni omavahel ja ka teiste seadmetega. See on mehhanism, mis võimaldab hajutatud sideseadmetel ja nende kasutajatel jagada omavahel ressursse. Tööstuslikud sidevõrgud on moodustatud järgmistel eesmärkidel:
- Andmevahetus kahe erineva seadme vahel;
- Ühiste jagatud ressursside kasutamine: seadmed, tarkvara ja informatsioon;
- Hajus andmetöötlus ehk erinevad seadmed töötlevad andmeosasid, mis on salvestatud teistes seadmetes (mitte neis endis).
Kõige lihtsam füüsiline sidevõrk (süsteem) kahe teineteisest kaugel asuva arvuti vahel on telefoniliini side abil, ühendades liini otstesse kaks modemit (need on seadmed, mis muundavad edastatud andmed telefoniliini kaudu edastatavateks signaalideks ja tagasi).
Sideseadmete füüsiline ühendamine võrgus ei pruugi kohe tähendada, et need seadmed on siis võimelised koos töötama. Seetõttu on hädavajalik, et mõlemad seadmed kasutaks sama protokolli, mis peaks erinevate seadmete- ja programmidevahelist informatsioonivahetust võimaldama.
Riistvaraline ühendus üksikute arvutite, kontrollerite ja teiste võrku kuuluvate perifeeriaseadmete vahel on loodud kaablite (koaksiaal, keerutatud juhtmepaar, valguskaabel) või mõne traadita tehnoloogia (IRDA, Bluetooth jne) abil.
Võrgusisene andmeülekanne on määratud erireeglite poolt, mida nimetatakse võrguprotokollideks (TCP/IP, NetBEUI, AppleTalk, PPTP, DHCP jne). Üldiselt rääkides, on 4 tüüpi võrkusid:
- LAN (Local Area Network), andmeside kohtvõrk – kohalik arvutivõrk, mille peal töötab individuaalne organisatsioon ja see asub ühes või mitmes kõrvutiasetsevas hoones (Joonis 2.1):
- MAN (Metropolitan Area Network), linnavõrk – katab asustatud piirkonna või suure hoone, mida jagab hulk organisatsioone;
- WAN (Wide Area Network), laivõrk – globaalne võrk, mis rakendab erinevates geograafilistes punktides asuvate arvutite ühendamiseks kiiret kaugsidet või satelliite (Joonis 2.2);
- SAN (Storage Area Network), kettavõrk – andmesalvestusvõrk, mida kasutatakse suurte andmemassiivide ühendamiseks serveritekimpu.

Joonis 2.1. LAN (Local Area Network), andmeside kohtvõrk
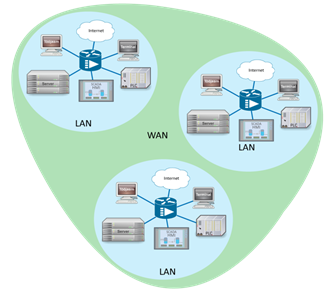
Joonis 2.2. WAN (Wide Area Network), laivõrk
Võrgutüübid
On olemas kahte põhitüüpi andmeside kohtvõrke (LAN), mida eristab võrku ühendatud seadmete autoriseerimine ja volituste omandamine. Võrdõigusliku ligipääsuga võrgus on igal võrguseadmel teiste seadmetega identne autoriseerimine. Samas klient-server tüüpi võrgu puhul määrab server teiste võrgus osalejate ligipääsu autoriseerimise, juhul kui iga arvuti-kliendi poolt on olemas vastav taotlus. Tööstuslikku tüüpi võrk on tavaliselt kombinatsioon mõlemat tüüpi võrgust.
Võrdõigusliku ligipääsu võrk
Seda tüüpi võrkudes (Joonis 2.3) on kõik sideseadmed võrdsed ja teatud ajahetkel võib sama seade tegutseda serverina, järgmisel ajahetkel aga kliendina. Ligipääs jagatud võrguressurssidele ei ole hallatud eraldiseisva serveri poolt nagu see toimub klient-server-võrkudes. Seda tüüpi võrkusid kasutatakse siis kui seadmete hulk on suhteliselt väike ja puudub vajadus keskse failide ning ressursside salvestamise järele.
Sellist tüüpi võrkude oluline eelis seisneb selle madalas ülesseadmise hinnas ja individuaalsete sõlmede lihtsas administreerimises. Puudub vajadus administreerimise ja konJoonisureerimise eest vastutava süsteemiadministraatori järele.
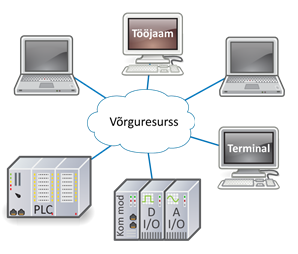
Joonis 2.3. Võrdõigusliku ligipääsu võrk
Klient-server tüüpi võrk
Sellist tüüpi võrkudes (Joonis 2.4) on individuaalsete masinate eesmärk algusest peale fikseeritud; võrku kuuluvatele tööjaamadele jagab ligipääsuõigusi ressurssidele ja teenustele üks (või mitu) serverit. Faile ja rakendusi, millele pääsevad kõik seadmed ligi, hoitakse serveris. Andmekaitse tase kindlustatakse võrgus ressursside prioriteetide kasutamise abil. Sellist tüüpi võrgud on kiiremad kui võrdõigusliku ligipääsuga võrgud ja võimaldavad lisada rohkem seadmeid, kuid ühisressursside täielikkus säilib. Teisest küljest, selliste võrkude ehitamiseks vajalikud seadmed on mitmeid kordi kallimad, vaja palgata eraldi süsteemiadministraatorit, kes peale muude nõudmiste peab tegelema ka andmeturbe teemadega eriti kui võrk on ühenduses interneti või mõne muu võrguga.
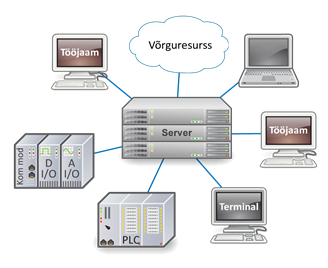
Joonis 2.4. Klient-server tüüpi võrk
Liittüüpi võrgud
Sellist tüüpi võrgud (Joonis 2.5) on kombinatsioon kahest ülalkirjeldatud tüübist. Erinevates organisatsioonides täidetavad spetsiifilised ülesanded muudavad liitvõrkude kasutamise konkreetsete nõudmiste täitmisel eelistatavaks.
Nagu näha diagrammilt (Joonis 2.5), siis kindel osa võrguseadmetest, mis kuuluvad ühte töögruppi, moodustavad võrdõigusliku ligipääsu võrgu, milles jagatakse ühiseid ressursse ilma serverita. Samal ajal on need seadmed ühenduses ka serveriga, mis on osa klient-server tüüpi võrgust.
Joonis 2.5. Liittüüpi võrgud [64]
Seega ühelt poolt kontrollib server kõige olulisemaid ressursse, mida vajab kogu võrk. Teiselt poolt aga ei jaota see ressursse nende seadmete juhtimiseks, mis on vajalikud võrdõigusliku ligipääsuga võrku ühendatud töögruppi kuuluvate arvutite tööks.
Võrgutopoloogiad ja mudelid
Kaasaegsete tootmissüsteemide eriomadused
Topoloogia defineerib sidevõrgu struktuuri. Eristatakse kahte tüüpi topoloogiat: loogiline ja füüsiline.
- Füüsiline topoloogia tegeleb ühenduskaablite, võrguseadmete ja võrgus asuvate kasutajatööjaamade riistvara konJoonisureerimisega.
- Loogiline topoloogia määrab viisi, kuidas kasutajad saavad ligipääsu võrgule ja võimalikud marsruudid sõlmedevaheliseks andmevahetuseks.
Füüsiliste topoloogiate tüübid
Siinitopoloogia
Siinitopoloogia puhul on kõik üksused sidemeediumiga ühendatud võrguadapterite abil magistraalliini külge (Joonis 3.1, vasakul). Samaaegselt on ainult ühel üksusel lubatud infopakette saata. See teeb vajalikuks hallata ja juhtida üksuste ligipääsu meediumile. Igast jaamast (üksusest) tulev ülekanne jaotatakse üle kogu siini mõlemas suunas ja seda võivad vastu võtta kõik üksused. Andmed kantakse üle pakettidena, mis sisaldavad vastuvõtva jaama aadressi, saatja aadressi ning muud infot.
Siinitopoloogia puuduseks on see, et võimalike signaalimoonutuste vältimiseks ei tohi tööjaamade vahekaugus teineteisest või magistraalliinist ületada maksimaalset lubatud kaugust. Veel enam, see võrk ei võimalda lihtsat diagnostikat. Siinitopoloogia ei võimalda võrgusisest andmekaitset, kuna kõik ülekanded tehakse mööda ühist magistraalliini, võimaldades seega igal võrgukasutajal autoriseerimata ligipääsu süsteemi.
Ring-topoloogia
Selles topoloogias ühendatakse üksus otse järgmise üksuse külge ja viimane üksus esimese külge (Joonis 3.1, paremal). Sellisel moel saavutatakse ringikujuline füüsiline ühendus. Kõik üksused ringis on ühendatud repiiterite abil. Sõnumid kantakse jaamast jaama ainult ühes suunas. Ring-topoloogia võrgud kontrollivad, kas edastatud sõnumid jõudsid sihtpunkti. Iga kord kui üksus võtab vastu sellele adresseeritud sõnumi, kopeeritakse see ja saadetakse saatjale tagasi lipuga, mis kinnitab vastuvõtmist. Iga kindla üksuse poolt saadetud pakett saadetakse edasi järgmisele ringis asuvale üksusele. Kui pakett jõuab sihtpunkti, siis see salvestatakse ja see jätkab liikumist mööda ringi. Pakett eemaldatakse ringist selle üksuse poolt, mis selle saatis.
Joonis 3. 1 Ring - topoloogia
Ring-topoloogia probleemiks on kõigi tööjaamade võrdne võimalus pääseda võrku. Individuaalseid ring-topoloogia võrke on võimalik ühendada ühiseks ring-topoloogia võrguks sildade abil, mis edastavad andmeid ühest ringist teise. Algselt ehitatud ring-topoloogia võrku on väga raske lisada uusi tööjaamu, kuna see eeldab kõigi võrgus toimuvate operatsioonide seiskamist, et lisada uus tööjaam, teha vajalik kaabeldus ja seadistus.
Tähttopoloogia
Täht-topoloogia puhul on iga tööjaam (Joonis 3.2, vasakul) ühendatud keskse sideüksusega (näiteks kontsentraator/jaotur) kahe ühesuunalise ühenduse abil (üks edastamiseks ja teine vastu võtmiseks). Sideüksus võib olla passiivne (see jaotab sisendsignaalid väljundliinidele) või aktiivne (see võtab vastu sisendsignaalid ja edastab need väljundliinidele). Täht-topoloogiate spetsiifiliseks eeliseks on see, et mõned üksused võrgus võivad omada suuremat prioriteeti kui ülejäänud. Sel viisil on sideüksus võimeline kontrollima kõrgema prioriteediga tööjaamadest tulevaid sõnumeid enne teiste üksuste päringute vastu võtmist. Seda kasutatakse võrkudes, kus mõni tööjaam peab saama oma päringutele kohese vastuse. Lisaks eelnevale võimaldab täht-topoloogia kasutada tsentraliseeritud diagnostikat. Kuna kõik sõnumid saadetakse sideüksusele, siis ei ole keeruline analüüsida individuaalsetelt tööjaamadelt tulevaid sõnumeid. See konkreetne topoloogia lubab lisada uusi tööjaamu sidevõrku ja analüüsida detailselt võrgu jõudlust. Täht-topoloogia peamiseks puuduseks on see, et sideüksuse vea või tõrke korral muutub kogu võrk mittetoimivaks.
Joonis 3. 2. Tähttopoloogia [64]
Laiendatud täht-topoloogia
Laiendatud täht-topoloogia (ühendatud tähed) on täht-topoloogia teisend. Seda tüüpi topoloogia puhul on mitmed tähed kaasatud ühisesse konJoonisuratsiooni (Joonis 3.2, paremal). Laiendatud täht-topoloogia heaks eeliseks on see, et vigane sideüksus ei muuda kogu sidevõrku düsfunktsionaalseks, kuigi lokaalse tähe tööjaamad ei saa kasutada võrgu teenuseid.
Hierarhiline topoloogia
Hierarhilisel topoloogial on mitmeid sarnasusi laiendatud täht-topoloogiaga (Joonis 3.3, vasakul), kuigi tema struktuur on ülesehitatud kui puu (kogu sidesüsteem hargneb allapoole liikudes laiali).
Silmus-topoloogia
Silmus-topoloogiat (Joonis 3.3, paremal) kasutatakse neil juhtudel, kui mõne sideme katkemisel peab võrk edasi töötama. Igal üksusel on oma ühendus mitme teise üksusega. Kui mõne teekonna (sideme) kasutamine ebaõnnestub, siis otsitakse andmetele alternatiivne teekond teiste seadmete kaudu.
Joonis 3. 3. Silmus topoloogia [64]
Üksused füüsilise ja loogilise võrgu struktureerimiseks
Sidevõrkudes kasutatakse füüsiliste ja loogiliste struktuuride loomiseks erinevaid sideüksusi. Saadaval on kolme gruppi sideüksusi:
Passiivsed üksused
Passiivsed üksused on sidevõrgu ühenduspunktid, mis ei muuda sisendisse saabuva signaali parameetreid. See üksuste grupp sisaldab:
Ühenduspistikud (Jack couplers) (Joonis 3.4, vasakul) on passiivsed üksused, mida kasutatakse võrgukaabli pikendamiseks.


Joonis 3. 4. Ühenduspistiku pesad
Seinapistik (wall plate) (Joonis 3.4, paremal) on ühenduspaneel ühe tööjaama jaoks, millel on tavaliselt üks või kaks porti. Portidesse on võimalik asetada pesasid RJ-45 või RJ-11 tüüpi otsadele.
Juhtmepaneel (Patch panel) (Joonis 3.5, vasakul) on ühendus- ja jaotuspunkt kaablite korraldamiseks.
Passiivne kontsentraator/jaotur (passive concentrator/hub) (Joonis 3.5, paremal) on keskne ühenduskolmik, mille abil luuakse ühendus hulga tööjaamade vahel. See ei sisalda elektroonilisi komponente ega vaja seega elektritoidet. Suvalisse porti saabuv sisendsignaal edastatakse kõigisse teistesse portidesse.


Joonis 3. 5. Passiivne jaotur
Aktiivsed seadmed
Aktiivsed seadmed võimendavad sisendsignaali. Lisaks on need võimelised signaali muutma ühest ülekandemeediumi tüübist teise. Siia kuuluvad järgmised seadmed:
Ülekandemeediumi konverterid (transmission medium converters). Need on tuntud kui adapterid või ülekandemeediumi translaatorid/konverterid, mis konverteerivad võrguliiklust kahe erinevat tüüpi ülekandemeediumiga sidevõrgu segmendi vahel. Näiteks valguskonverter loob ühenduse UTP-kaabelvõrgu ja valguskaabelvõrgu vahel.

Repiiter. See seade funktsioneerib füüsilisel tasandil, suurendab sidevõrgu kogupikkust. See taastab signaalitugevust ja parandab impulsi tugevust suurematel vahemaadel. Repiiterid ei filtreeri neid läbivaid signaale; nad ainult regenereerivad signaale, sealhulgas saadetud sõnumeid, müra ja häireid. Nende põhirakenduseks on sama võrgu kahe võrgusegmendi ühendamine ja nendevaheliste signaalide võimendamine normaalstasemele. Repiitereid on võimalik kasutada mitmete ülekandemeediumitega kuni nende tüübid ühtivad, siiski ei saa neid kasutada erinevat tüüpi struktuure või ligipääsumeetodeid kasutavate segmentide ühendamiseks.
Hub (jaotur). See on mitme sisendiga repiiter, millega luuakse täht-ühendus. Seda iseloomustavad tehnilised spetsifikatsioonid ja omadused on järgmised:
- Muudab võrgu füüsilist topoloogiat, kuid mitte selle loogilist struktuuri;

- Ühendab individuaalsed, võrgukaardiga varustatud tööjaamad ühtseks võrguks;
- Hubid võimaldavad lisada olemasolevasse võrku uusi füüsilisi tööjaamu;
- Kõik pordid on võrdse prioriteediga;
- Protsessi, mille käigus hub mõned pordid välja lülitab, kui tuvastatakse talitlushäire, nimetatakse segmentatsiooniks;
- See leiab rakendust võrkudes, mis kasutavad UTP kaableid;
- Vastu võetud andmepakette ei puhverdata, mistõttu on andmevahetuskiirus väike;
- See ei sünkroniseeri teistel kiirustel töötavaid porte.
Seadmed võrgu, segmentide ja alamvõrkude struktureerimiseks
Seadmeid nagu sillad, switchid, ruuterid ja lüüsid kasutatakse sidevõrkude loogiliseks struktureerimiseks (Joonis 3.6).
Sild (bridge). See jagab võrgu loogilisteks segmentideks ja sõnumid edastatakse ühest segmendist teise üle silla pordi, kui vastuvõtja unikaalne võrguaadress (MAC [1]) kuulub vastavasse segmenti. See seade sisaldab mõlema segmendi üksuste aadressitabelit ja side käib järgnevate sammude jadana:
- Andmepaketi vastuvõtmisel algatatakse lähteaadressi ja sihtaadressi kontroll. Tabelis on esitatud igas segmendis oleva üksuse individuaalne aadress.
- Kui sihtaadressi ei ole kirjutatud tabelisse, tuleb pakett edastada kõikidesse segmentidesse. Sihtaadressi puudumisel tabelist lisatakse see võimalusel sinna automaatselt.
- Sild edastab paketi vastavale segmendile, kui sihtaadress on kirjutatud tabelisse.
- Kui lähteaadress ja sihtaadress on samas segmendis, ei edasta sild andmepaketti teise segmenti.

Sildade peamine eesmärk on filtreerida segmentidevahelistliiklust, et vähendada ummikuid suuremate kohtvõrkude puhul. Sillad võivad tegutseda kui eraldiseisvad seadmed või olla osa arvutist. Sillad tegutsevad OSI[2]võrgumudeli kanalikihis – andmepakettide tasandil. Need leiavad rakendust võrkudes, mis on ehitatud kontsentraatorite/hubidega, et limiteerida andmepakettide valet edastamist või ühendada kaht eemalasuvat lokaalvõrku üheks. Sarnaselt, eraldavad need ühe konkreetse segmendi liikluse ülejäänud osa liiklusest ja tõstavad kogu võrgu mahtu ning kiirust. Kaks lokaalset võrku, mis on silla abil ühendatud, on füüsiliselt küll erinevad, kuid loogiliselt siiski üks võrk.

Switch (kommutaator). See on uuema generatsiooni sild, mis kindlustab informatsiooni paralleelse töötlemise. Switchi kasutatakse kõige laialdasemalt tööjaamade ühendamiseks täht-topoloogia võrkudes. See suurendab võrgu andmevahetuskiirust. Välimuselt sarnaneb see hubiga kuid siiski on kommutaator sellest oluliselt intelligentsem seade. Hub edastab vastuvõetud signaali kõigisse portidesse, switch seevastu filtreerib informatsiooni ning edastab selle ainult sihtseadmetele. Switch on mitme pordiga sild ja tegutseb järgneva sammujadana:
Paketi saabumisel kindlasse switchi porti kontrollib see, kas pakett on korralikult vastu võetud, seejärel viitab oma tabelile, et kindlaks teha, kas selles on vastuvõtja MAC aadressi kirje.
Kui MAC aadress puudub tabelist, edastab kommutaator andmepaketi kõigisse oma portidesse ja saab vastuse sihtseadmelt. Vastavustetabelisse tehakse kirje, mis näitab, milline väljundport sobitati selle konkreetse MAC aadressiga. Kõik järgnevad sama aadressi kandvad andmepaketid edastatakse otse vastavasse porti.
Kommutaator edastab paketi otse vastavasse porti, kui on olemas MAC aadressi kirje.
Eksisteerib kolme tüüpi vastuvõtja aadresse (andmeplokkide edastusviisi): leviedastus (broadcast), multiedastus (multicast), üksikedastus (unicast). Leviedastusaadressi puhul saadetakse pakett kõigisse portidesse, samal ajal kui multiedastusaadressi puhul saadetakse pakett eelnevalt kindlaks määratud portidesse. Üksikedastus aadressi puhul saadetakse pakett ainult ühte porti, mis omakorda tõstab võrgu turvalisust, mahtu ja kiirust.
Switchi eritüüpe eristatakse sõltuvalt sellest, millist OSI mudeli võrgukihti need kasutavad tegutsemiseks. Tavapärased switchid töötavad OSI mudeli teise kihi baasil. Kõrgema klassi kommutaatorid töötavad OSI mudeli kolmanda ja neljanda kihi baasil. Need switchid toimivad ruuterile sarnaselt. Tavaliselt on nende ühendus limiteeritud ühe MAC aadressiga ja ühenduse ülekande kiirus on ka limiteeritud.
Teised switchi spetsiifilised tunnused on järgmised:
- Omab iga pordi jaoks spetsiaalset protsessorit, mis töötleb sissetulevaid andmepakette (kaadreid) ülejäänud portide protsessoritest eraldi;
- Võimaldab igal tööjaamal edastada andmeid üle ülekandemeediumi ilma teiste tööjaamadega konkureerimata;
- Kontrollib sellesse ühendatud seadmete MAC aadresse;
- Tõlgib andmepakette ühest standardist teise (näiteks Ethernetist FDDI-sse);
- Lingib mitmed eraldiseisvad seadmed ja võrgusegmendid, millest igaühel võib olla veel sellesse ühendatud terminale;
- Puhverdab andmed (salvesta-ja-edasta) enne vastuvõtja ühendusparameetrite tuvastamist;
- Kommutaatorid suhtlevad omavahel täisdupleks-režiimis, mis võimaldab andmeid edastada ja vastu võtta samaaegselt.


Joonis 3. 6. Ruuteri poolt tehtav töö [64]
Ruuter on eraldiseisev seade, mida kasutatakse infopakettide jaotamiseks erinevate võrkude või võrgusegmentide vahel. Ruuterina saab kasutada ka tavalist arvutit. Erinevalt hubidest, sildadest ja madalama taseme switchidest töötab ruuter OSI võrgukihis IP aadressidega, mitte MAC aadressidega. Sillaga võrreldes isoleerib ruuter liiklust efektiivsemalt, kasutades individuaalsete sõlmede aadresse. Kui võrgus lingitakse kindel seade ruuteri abil, jääb selle MAC aadress varjatuks. Ruuterid saavad valida parima otsetee kindlale aadressile võimalike olemasolevate marsruutide hulgast. Ülekande marsruudi määramiseks ja andmepakettide edastamiseks kasutab ruuter enda marsruutimistabelit, milles on teiste ruuterite IP aadressid salvestatud. Ruuter genereerib selle tabeli ise, kogudes vastavat infot, muutuste ilmnemise korral uuendab tabelit teiste ruuterite abil. Ruuteri poolt tehtavat tööd (Joonis 3.6) saab illustreerida järgneva näitega:
Võrk A koosneb seadmetest А1 ja A2. Võrk B koosneb seadmetest B1 ja B2. Mõlemad võrgud on ühendatud ruuterite abil. Kui andmed saadetakse seadmelt A1 seadmesse А2, ei edasta ruuter pakette võrku B. Sel viisil on võrgu B liikluse ülekoormamine limiteeritud. Juhul, kui saadetakse andmed seadmest А1 seadmesse B1, edastab ruuter andmed võrku B, kus andmed tuleb vastu võtta seadme B1 poolt.
Ruuteri kasutamine ühendusseadmena vähendab võrguliiklust individuaalsete võrkude vahel ja parandab kohtvõrgu turvalisust.
Lüüsid (gateways). Lüüs ühendab kahte kohtvõrku nagu ka globaalseid võrke, mis ei ühildu ligipääsuprotseduuride ja protokollide poolest (näiteks DeviceNet ja CANopen). Lisaks sellele eristab ja tuvastab erinevate võrkude liiklust kummalgi pool lüüsi. Kõige sagedamini kasutatakse lüüse kohtvõrgu linkimiseks globaalsesse võrku või kahe eemalasetseva kohtvõrgu linkimiseks üle globaalse võrgu.
Võrgumudelid
Mitmed töötlemise, juhtimise, kodeerimise ja muud võrguside andmeüksuste protsessid eeldavad kommunikatsiooniprotsessi läbimise erinevate etappide (kihtide) ja faaside kirjeldamise (modelleerimise) formaliseerimist.
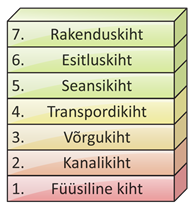
OSI võrgumudel
OSI võrgumudel kirjeldab baasarhitektuuri, mis jaotab võrguside anmdepakettide vahetamiseks seitsmes iseseisvas kihis (Joonis 3.7). See on välja töötatud Rahvusvahelise Standardiorganisatsiooni (International Standards Organization, ISO) poolt. OSI võimaldab süsteemidel omavahel suhelda. Seda standardit kasutavad võrguseadmete tootjad seadmete, operatiivsüsteemide ja protokollide loomisel, see omab järgmisi spetsiifilisi tunnuseid:
- Iga kiht suhtleb külgnevate kihtidega ainult standardiseeritud protokollide abil;
- Igale kihile on omistatud spetsiifilised funktsioonid; kiht pakub liidest ja teenuseid ülemisele kihile ja sarnaselt kasutab ise alumise kihi teenuseid.
- Kihte eraldatakse liideste järgi;
- Enne seda, kui andmed saadetakse ühest kihist teise, jagatakse see andmepakettideks - need on infoüksused, mida edastatakse ühtsena ühest seadmest teise;
- Võrgutarkvara edastab andmepaketid jadamisi ühest kihist teise, teostades igale paketikihile lisavormindamist või adresseerimist.
- Kasutajapoolel käib andmepakett läbi kihtide tagurpidi järjestuses; iga kiht eemaldab ülekande ajal selle kihi poolt lisatud lisainfo. Kui andmepakett jõuab rakenduskihti, eraldatakse täielikult aadressinfo.
Rakenduskiht (7). See on mudeli kõige ülemine kiht, mis töötab vahendajana tarkvararakenduste ja võrguteenuste vahel. Sellel töötavad protokollid nagu HTTP, FTP, Telnet, SMTP, POP3, IMAP4, SNMP. Kihi põhiülesandeks on juhtida üldist võrgu ligipääsu, andmevoogusid ja vigade parandamist. Selle kihi spetsiifilised tunnused on järgmised:
- Kasutajatel on otsene ligipääs;
- Lülitab sisse programmi seadmed ja töödeldavad andmed, mis tõenäoliselt vahetavad infot teiste tööjaamadega;
- Igale sõnumile lisatakse päis, luues sellega informatsiooni struktuuri, mis identifitseerib edastava ja vastuvõtva tööjaama.
Esitluskiht (6). See määrab kindlaks andmevahetuse formaadi. Siin esitatakse andmed universaalsetes andmepakettides. Vastuvõtja poolel konverteeritakse andmed universaalsetest andmepakettidest vastuvõtva jaama esitluskihi poolt kasutatavasse formaati. Selle kihi tunnusteks on:
- Esitluskihi sõnumid muudetakse edastamiseks ja vastuvõtjale arusaamiseks mugavasse formaati.
- Võimaldab andmete pakkimist, andmete krüpteerimist autoriseerimata ligipääsu ära hoidmiseks ja protokollide transleerimist, et võimaldada erinevate seadmete ja operatiivsüsteemide vahelist sidet;
- Igale sõnumile lisatakse päis, mis sisaldab infot pakkimise ja krüpteerimise meetodite ning andmete kirjutamise formaadi kohta.
Seansikiht (5). See kiht loob seansikanali kahe võrguseadme vahel. Programmide vahel on iga seansi jooksul dialoog. Seansid võimaldavad kahesuunalist sidet täisdupleks-režiimis või pooldupleks-režiimis. Ühendusmeetod on kirjutatud seansikihi päisesse. Seansikiht juhib ja sünkroniseerib andmeülekannet ning kaitseb ülekande katkestuste eest. Seansikihi protokollide hulgas on sellised liidesed nagu Network Basic Input/Output System (NetBIOS), Berkeley UNIX soklid (Sockets), Windows Sockets (Winsock).
Transpordikiht (4). See teostab andmepakettide transporti täpses jadas ilma vigade ja kadudeta. Lisaks on see kiht võimeline liiklust optimeerima, ühendades eelnevaid mittetäielikke andmepakette. Sellel kihil töötavad transpordiprotokollid nagu TCP, UDP ja domeeninimesüsteemi (DNS) teenus. Transpordikihi omadused on järgmised:
- Kindlustab andmeedastuse kaitse;
- Valmistab ette kontrollsummad, mis võimaldavad tuvastada ja parandada andmeedastuse ajal tekkivaid vigu;
- Arhiveerib ülekantud andmed vea ilmnemise korral edastamiseks;
- Lisab sõnumi päisesse kontrollsumma ja andmepaketi positsiooni andmed;
- Vastuvõtvas jaamas pakib andmepaketid lahti ja korrastab need algsesse järjekorda, millele järgneb nende vastuvõtmise kinnituse saatmine.
Võrgukiht (3).See adresseerib sõnumid ja määrab kindlaks marsruudi, mida mööda andmepaketid kantakse üle lähtejaamast sihtjaama. Aadressid lisatakse sõnumitele päisevormis. Kiht jälgib liiklust ja juhib andmeprioriteete (teenusekvaliteet, Quality of Service, QoS). IP-protokoll ja ruuterid töötavad antud kihi baasil.
Kanalikiht (2). See kiht saadab andmekaadreid (sõnumeid) võrgukihilt füüsilisele kihile. See koosneb kahest alamkihist: - meediumpöörduse juhtimiskiht (Media Access Control, MAC) ja loogilise lüli juhtimiskiht (Logical Link Control, LLC). MAC eraldab tööjaamadele ligipääsu operatiivmeediumile ja defineerib MAC aadressid. LLC määrab kindlaks loogilise struktuuri. Vastuvõtja poolel pakib andmelülikiht füüsilise kihi järjestikbitid andmekaadrite formaati.
Iga kaadri saatmisele järgneb selle saabumise kinnituse genereerimine. Kaadrid, mille kohta ei ole vastuvõtmise kinnitust, või mis on viga saanud, edastatakse uuesti. Silld- ja kommutaatorseadmed töötavad kanalikihi baasil.
Füüsiline kiht (1). See kiht pakub kaadrites baitide ja bittide krüpteerimist elektriliste või valgussignaalide moel, nagu ka nende edastamist võrgumeediumile (kaabel). Lisaks sellele teostab see järgnevaid põhifunktsioone:
- Defineerib kaablite ühendamisviisid võrgujaamade väljundterminalidesse;
- Defineerib andmeedastustehnika mööda võrgukaablit, nagu ka andmekrüpteerimise ja bittsünkroniseerimise;
- Määrab ära iga biti kestuse ja selle, kuidas bitid muudetakse vastavaks elektriliseks või valgusimpulsiks võrgukaabli jaoks.
Sellel tasandil opereerivad seadmed on võrgukaardid, kordistajad (doubler), kontsentraatorid ja konverterid.
DoD mudel
DoD (Department of Defense) võrgumudel töötati välja USA Kaitseministeeriumi poolt enne OSI mudelit. See töötati välja koos TCP/IP protokollidega osana ARPAneti projektist. Seetõttu tuntakse DoD ka TCP/IP mudeli nime all. DoD koosneb neljast kihist (Joonis 3.8):
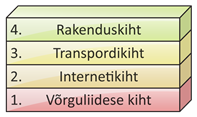
- Rakenduskiht (application layer) – kõige kõrgem mudeli kiht, mis täidab OSI mudeli kolme kõrgema kihi funktsioone;
- Transpordikiht (transport layer) – vastab OSI mudeli transpordikihile;
- Internetikiht (internetworking layer) – vastab OSI mudeli võrgukihile.
- Võrguliidese
kiht (network interface) – vastab OSI mudeli kanali- ja
füüsilisele kihile.
