
ANDURID
POSITSIOONI-, NIHKE-, KIIRUS- JA KIIRENDUSANDURID
Enimkasutatavad positsiooni-, nihke-, kiirus- ja kiirendusandurite tüübid on järgmised:
- kontaktandurid;
- potentsiomeetrilised anduri;
- induktiivsed ja vastastikku induktiivsed andurid;
- mahtuvuslikud mõõtemuundurid;
- absoluutenkooderid;
- optilised muundurid;
- piesoelektrilised muundurid.
Kontaktandurid
Kontaktandurid (contacthrones) on muundurid, milles sirgjooneline või nurga nihe (mõõtmed) muundatakse elektriahelat juhtivate kontaktide avatud või suletud olekuks.
On välja töötatud ühepiirkonna- (joonis 5.1), topeltpiirkonna- (joonis 5.2) ning mitmepiirkonna- (joonis 5.3) kontaktandureid.
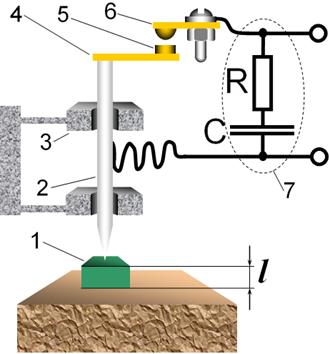
1 – juhitav objekt; 2 – võll; 3 – silindrilised juhikud; 4 – kontaktelektrood;
5 – lame (silindriline) kontakt; 6 – fikseeritud kontakt; 7 – kaarekustutusgrupp
Joonis 5.1 Kontaktandur [63]
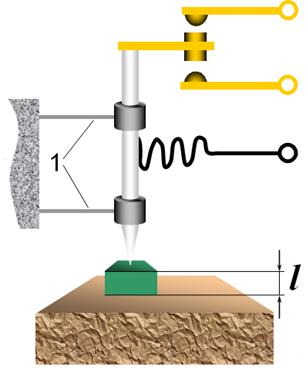
1 – lamevedrud
Joonis 5.2 Kontaktandur [63]
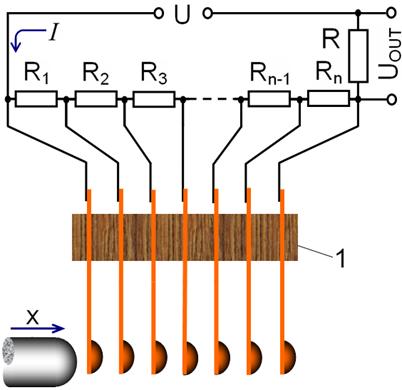
1 – isolatsioon
Joonis 5.3 Kontaktandur [63]
(5.1)
Kontaktid on valmistatud hõbedast, vasest, plaatinast, roodiumist, volframist, molübdeenist jne. Kaarekustutusgrupi ülesanne on vältida sädemeid ja elektrikaart.
Magnet-juhtimisega kontaktid
See on üks variant kontaktmuunduritest (joonis 5.4). Neid nimetatakse ka herkoniteks (hermeetilisteks kontaktideks) või keelanduriks.
1 – klaasampull; 2 – magnetiliselt pehmest materjalist elekroodplaadid (nt. permalloi); 3 – kontaktid (plaatina, kuld, hõbe jne)
Joonis 5.4 Herkonandur [63]
Klaasampulli läbimõõt on u 3 mm ja see on u 20 mm pikkune. See on täidetud kas inertgaasiga (lämmastik, argoon või vesinik) või see on hermeetiline. Elektroodplaadid on sellesse pressitud. Nad on valmistatud magnetiliselt pehmest materjalist (tavaliselt permalloi). Magnetväli sulgub nende ümber ja läbi kontaktide vahelise õhupilu. Kontaktid on kaetud hõbeda, kulla, plaatina, plaatina-roodiumi või nende sulamitega. Elektroodid töötavad magnetahelana, kontaktide ja vedrudena.
Kontakte juhitakse välise magnetväljaga, mida tekitab püsimagnet. Magnetväli muutub kahel viisil:
magnetvälja tekitava püsimagneti liigutamise või pööramisega (jooni 5.5а, b);
püsimagneti ja ampulli vahele paigutatud ekraani liigutamisega (joonis 5.5c).

a

b

c
Joonis 5.5 Herkonanduri tööpõhimõte [63]
Magnet-juhitavatel kontaktidel on järgmised eelised: väikesed mõõtmed, madal hind, hea oksüdeerumise- ja tolmukindlus, suur lülituste arv – 10 6 ...10 9 , hea kiirus – 0,2...0,5 >m/s jne.
Potentsiomeetrilised andurid
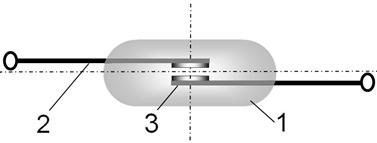
Mehaaniliste kontaktidega potentsiomeetrilised andurid
Potentsiomeeter on takisti konstantse takistuse väärtusega R p , millel libiseb liugur, mis moodustab elektrilise kontakti. Liugur on mehaaniliselt ühendatud uuritava objektiga, mille liikumist tuleb üle kanda.
Takistus R liuguri ja takisti ühe otsa vahel on järgmine funktsioon:
liuguri asend;
takisti ehitus.
Kui takistil on homogeenne ehitus, siis potentsiomeeter on lineaarne, kuna esineb otsene proportsionaalne sõltuvus takistuse R ja liuguri asendi vahel. Sel juhul saab sõltuvalt liuguri nihketrajektoorist eristada:
lineaarse nihkega potentsiomeetreid (joonis 5.6 а)
![]()
(5.2)
a
b
c
Joonis 5.6 Potentsiomeetrilised andurid
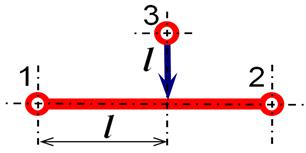
pöördpotentsiomeetreid
![]()
(5.3)
See
alagrupp sisaldab: ringpotentsiomeetreid (![]() ) (joonis 5.6 b)mitmepöördelisi potentsiomeetreid
) (joonis 5.6 b)mitmepöördelisi potentsiomeetreid ![]()
(joonis 5.6 c)
Potentsiomeetriliste andurite takisti võib olla kas elektrijuht või voolujuhtiv riba.
Kui nendes andurites on kasutatud õhukest kalibreeritud voolujuhti koos liuguriga, neid nimetatakse ka reohordmuunduriteks (reohordideks).
Kui voolujuht on mähitud karkassile, neid nimetatakse reostaatanduriteks.
Reostaatanduridon erilahendusega reostaadid, mille liugur liigub sisendsuurusega– lineaar- või nurknihe vm suurus (jõud, rõhk jne), mis on eelnevalt muudetud lineaarseks või nurknihkeks. Seetõttu nende muundurite ülekandefunktsiooniks on:
![]()
(5.4)
kus X on sirgjooneline või nurganihe.
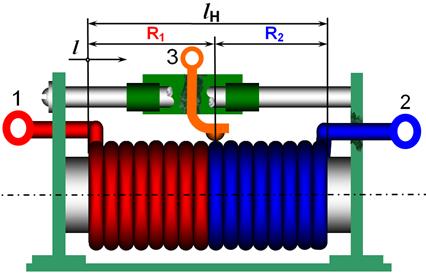
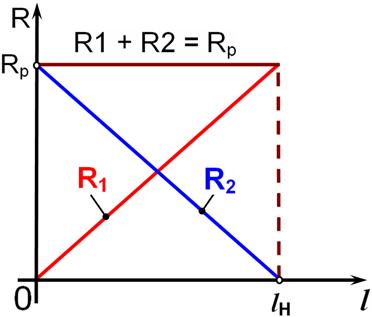
Kõige
sagedamini kasutatakse lineaarseid reostaate. Nende takistustraat on mähitud
karkassile kogu selle pikkuses ühtlase sammuga ühtse sektsioonina (joonis 5.7
а). Liugurilt algavad kaks klemmi ja tekitavad kaks väljundtakistust R1 ja R2. Joonise 5.7 b kõveratelt on näha, kuidas need
takistused muutuvad. Tunnusjooned ![]() ja
ja ![]() on lineaarsed ning Rp on reostaadi kogutakistus.
on lineaarsed ning Rp on reostaadi kogutakistus.
a
b
Joonis 5.7 Potentsiomeetrilised andurid
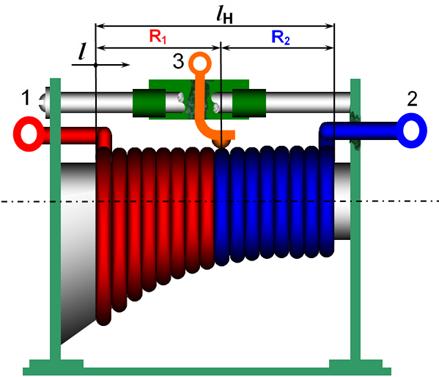
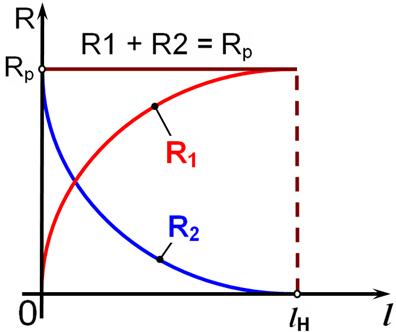
Toodetakse ka funktsionaalseid reostaate, mille tunnusjoon on tahtlikult mittelineaarne. Selle võib saavutada karkassi sobiva kujuga (joonis 5.8), sobiva keerdude sammu valikuga või lineaarse reostaadi osade takistitega lühistamisega.
a
b
Joonis 5.8 Potentsiomeetrilised andurid
Mehaaniliste kontaktideta potentsiomeetrilised andurid
Nad võivad põhineda erinevatel efektidel. Nende peamiseke eeliseks on kontaktpindade hõõrdumise ja kulumise puudumine. Need on kontaktivabad muundurid.
- Fotoefektil põhinevad potentsiomeetrid (pöördpotentsiomeeter optilise ühendusega)
Fototundliku kihi takistus väheneb järsult valguse mõjul (joonis 5.9).
1 – fikseeritud ketas; 2 – juhtivast materjalist rõngas (kontaktiala); 3 – fototundlik rõngas (ala); 4 – takistusala (mõõteala); 5 – valgusdiood. See väljastab valguskiire; 6 – pöörlev element. Selle kohale on paigutatud kaks üksteise suhtes täisnurga all asuvat peeglit
Joonis 5.9 Potentsiomeetriline andur ilma mehaanilise kontaktita [63]
See punkti, kus valguskiir põrkub fototundliku alaga, muutub juhtivaks ja moodustab sel viisil kontakti tsoonides 4 ja 2. Valguskiir on niisiis liuguri rollis.
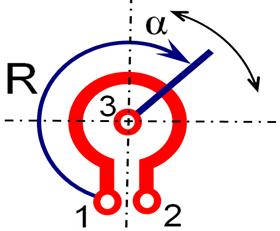
Magnetilised potentsiomeetrid
Neis kasutatakse magnettakisteid. Need on takistid, mille väärtus muutub magnetvälja mõjul. Kui selline takisti asub magnetväljas, siis tema takistus suureneb järsult.
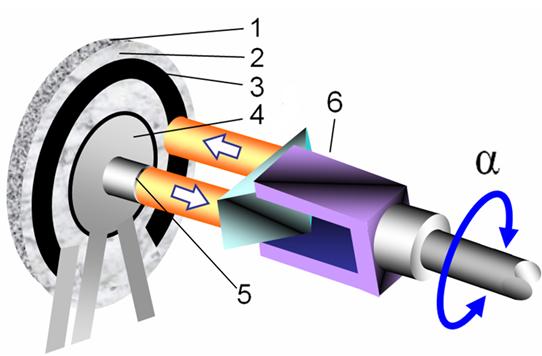
Magnetpotentsiomeetri
ehitus (joonis 5.10) koosneb poolketta kujulisest kambrist, millesse sisenevad
kaks magnettakistit R 1 ja R 2. Selle ketta ülemisele ja
alumisele pinnale on paigutatud magnetpoolused, mis tekitavad magnettakistitega
lõikuva magnetvälja. Punkt 3 on neile ühine. Kui ketast pööratakse, siis R 1 ja R 2 muutuvad erinevates suundades. Mida suurem osa
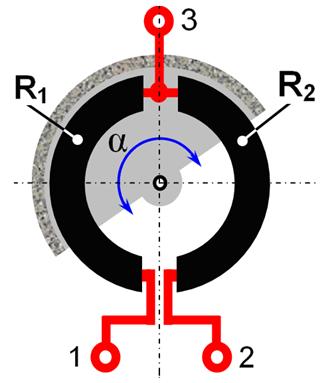
magnettakistist on kaetud magnetväljaga, seda suurem on takistus. Joonis 5.11
kujutab takistuse R
muutust sõltuvalt nurkhälbest ![]()
Joonis 5.10 Magnetiline potentsiomeeter [63]
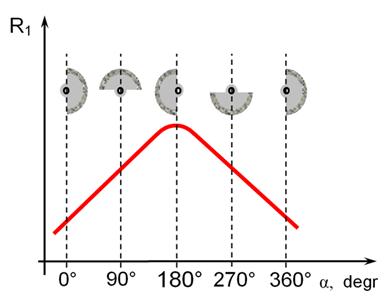
Joonis 5.11 Magnetiline potentsiomeeter tööpõhimõte
0 ° - ketas katab R 2 ja taksitusel R< 1 on miinimumväärtus;
90 ° - takistusel on keskmine väärtus ja R 1 =R 2;
180 ° on maksimaalväärtusega;
270 ° - takistusel on jälle keskmine väärtus ja R =R 2;
360 ° - takistus R on jälle minimaalväärtusega;
Induktiivsed ja vastastikku induktiivsed andurid
Induktiivandurid koosnevad induktiivpoolist, mis on paigutatud õhupiluga magnetsüdamikule. Pooli parameetrid sõltuvad sisendsuurusest, milleks tavaliselt on lineaarne või nurknihe vm suurus, mis on muudetud nihkeks.
Sisendsuuruse
Х, mõjul muutuvad õhupilu
parameetrid (selle pikkus ![]() või pindala s) ja seega – muutub õhupilu ja kogu
pooli magnetahela takistus. Selle tulemusena muutub pooli induktiiv- ja
näivtakistus.
või pindala s) ja seega – muutub õhupilu ja kogu
pooli magnetahela takistus. Selle tulemusena muutub pooli induktiiv- ja
näivtakistus.
Kogu
magnetiline takistus on ![]() (5.5)kus
(5.5)kus ![]() on õhupilu magnetiline
takistus,
on õhupilu magnetiline
takistus, ![]() on pooli (tavaliselt
lehtterasest) magnetsüdamiku magnetiline takistus.
on pooli (tavaliselt
lehtterasest) magnetsüdamiku magnetiline takistus.
Kuna
magnetiline kogutakistus on määratud õhupilu takistusega ( ![]() ), siis
), siis 
![]() >on õhupilu pikkus,
>on õhupilu pikkus, ![]() on magnetiline
konstant (vaakumi magnetiline läbitavus), s on õhupilu ristlõike pindala.
on magnetiline
konstant (vaakumi magnetiline läbitavus), s on õhupilu ristlõike pindala.
Need
muundurid töötavad vahelduvvooluga ja pooli näivtaksitus on ![]()
![]() on selle nurksagedus
on selle nurksagedus ![]() ja f on sagedus.
ja f on sagedus.
Kuna ![]() kehtib poolile, siis
kehtib poolile, siis  (5.8)
(5.8)
Järelikult,
kui ![]() ja s muutuvad, muutub ka pooli takistus.
Seetõttu kasutatakse muunduri ehitusi, kus muutub üks kahest parameetrist.
ja s muutuvad, muutub ka pooli takistus.
Seetõttu kasutatakse muunduri ehitusi, kus muutub üks kahest parameetrist.
On
võimalik välja töötada nii üksikuid kui diferentsiaalandureid. Lähtudes
ülekandefunktsioonist (5.8),![]() on üksikutel
muunduritel mittelineaarne ja
on üksikutel
muunduritel mittelineaarne ja ![]() on lineaarne.
on lineaarne.
Diferentsiaalmuundurid võimaldavad laiendada tundlikkust, parandada muundusfunktsiooni lineaarsust, aga ka vähendada vigade määra.
Iga induktiivse muunduri võib muuta vastastikkus induktiivseks (trafo- muunduriks), kui magnetsüdamikule paigutada teine (mõõte) mähis, milles indutseeritaks elektromotoorjõud. Esimest mähist nimetatakse ergutusmähiseks. Diferentsiaalanduritel on lisatud kaks täiendavat sekundaarmähist.
Üksikmuundurites
kahe mähise vastastikune induktiivsus M
on  (5.9)
Muunduri
sekundaarmähises indutseeritud elektromotoorjõud (e.m.j.) on
(5.9)
Muunduri
sekundaarmähises indutseeritud elektromotoorjõud (e.m.j.) on ![]() (5.10) Järelikult,
kui
(5.10) Järelikult,
kui ![]() või s muutuvad, muutub ka indutseeritud
e.m.j. Sõltuvus
või s muutuvad, muutub ka indutseeritud
e.m.j. Sõltuvus ![]() on mittelineaarne ja
on mittelineaarne ja ![]() on lineaarne.
on lineaarne.
Mõõtemuundurite ehitus
Muutuva õhupiluga magnetsüdamikuga muundurid 
Need on enimkasutatavad induktiivmuundurid. Joonisel 5.12 on kujutatud seda tüüpi üksik induktiivmuundur.
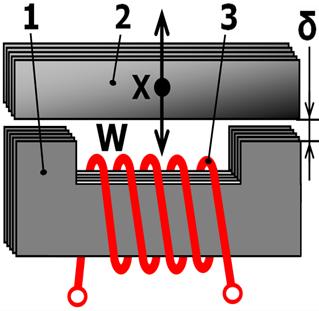
1 – magnetsüdamik; 2 – ankur; 3 – mähis
Joonis 5.12 Induktiivmuundur [63]
Ankur
liigub sisendsuuruse Х mõjul ja
tekitab õhupilu muutuse ![]() ning vastavalt
(5.8-le) - ka mähise näivtakistuse muutuse.
ning vastavalt
(5.8-le) - ka mähise näivtakistuse muutuse.
Joonisel
5.13 kujutatakse diferentsiaalset
induktiivmuundurit, millel muutub ![]()
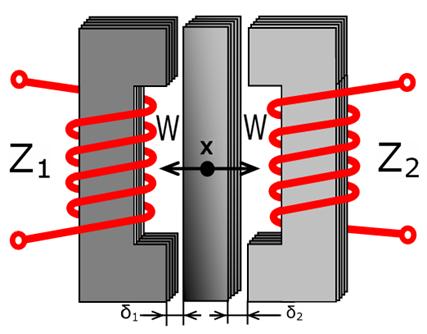
Joonis 5.13 Diferentsiaalne induktiivmuundur [63]
Joonised
5.14 ja vastavalt 5.15 kujutavad vastastikku
induktiivset üksik- ja diferentsiaalmuundurit õhupilu ![]() muutmisega
lineaarnihkega.
muutmisega
lineaarnihkega.
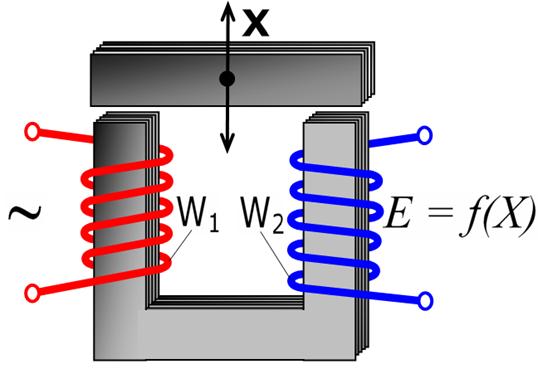
Joonis 5.14 Üksik diferentsiaalne induktiivmuundur [63]
Joonis 5.15 Diferentsiaalne induktiivmuundur [63]
Muutuva õhupilu pindalaga magnetsüdamikuga muundurid
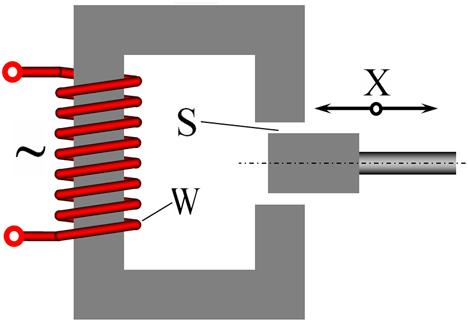
Joonis 5.16 kujutab üksik-induktiivmuundurit ja joonis 5.17 kujutab seda tüüpi induktiivset diferentsiaalmuundurit.
Üksik-induktiivmuundur joonisel 5.16а töötab lineaarnihkele. Sisendsuuruse X mõjul ankur liigub vasakule või paremlae ja sedasi suurendab või vähendab pindala s.
a
b
Joonis 5.16 Muutuva õhupilu pindalaga magnetsüdamikuga muundur [63]
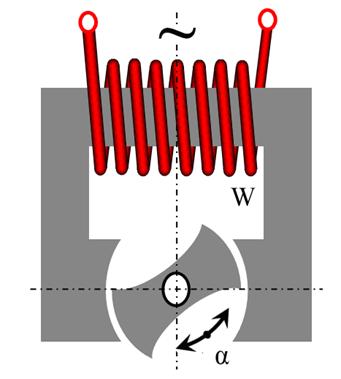
Üksik-induktiivmuundur joonisel 5.16b töötab nurknihkele.
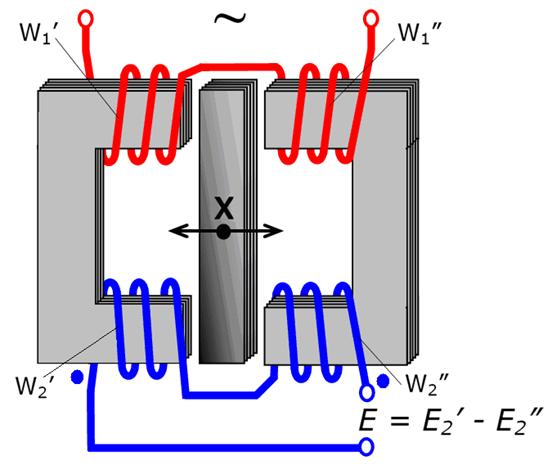
Diferentsiaalne induktiivandur (joonis 5.17) töötab nurknihkele, mis tekitab muutused õhupilude pindalades s1 ja s2.
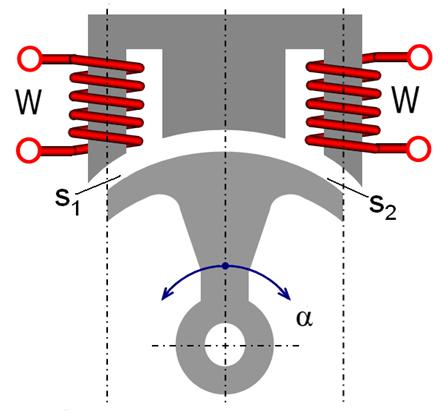
Joonis 5.17 Diferentsiaalne induktiivandur [63]
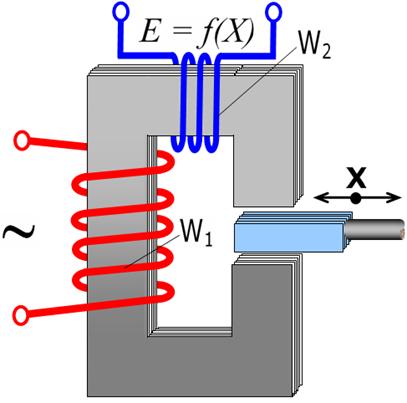
Joonis 5.18 Iinduktiivandur lineaarnihke mõõtmisek
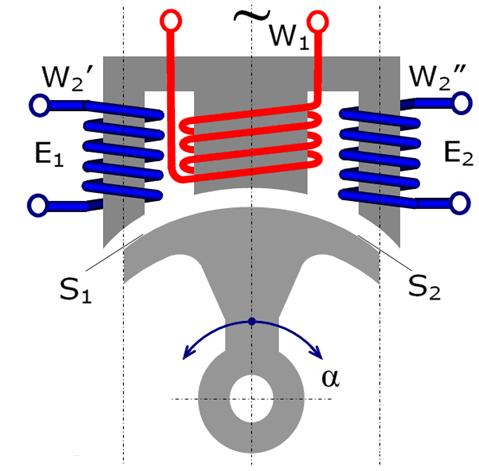
Joonis 5.19 Iinduktiivandur nurknihke mõõtmiseks [63]
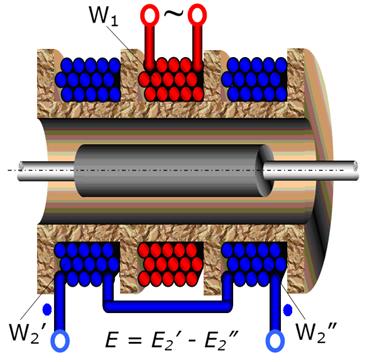
Joonis 5.18 kujutab üksikut vastastikku induktiivset muundurit lineaarnihke mõõtmiseks ja joonis 5.19 kujutab diferentsiaalset vastastikku induktiivset muundurit nurknihke mõõtmiseks õhupilu pindala muutmisega.
Liikuva südamikuga mõõtemuundurid
Joonisel 5.20 on kujutatud induktiivse üksiku liikuva südamikuga muunduri skeem. Seda kasutatakse suuremate nihete mõõtmiseks (kuni mõned mm-d).
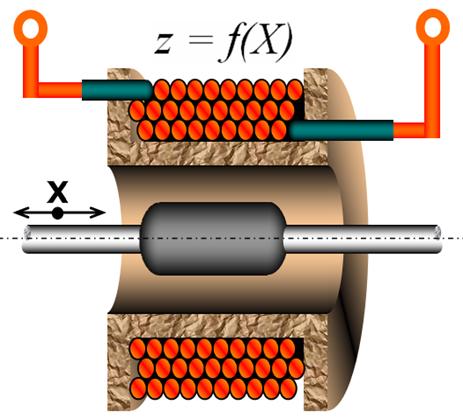
Joonis 5.20 Liikuva südamikuga mõõtemuundur [63]
Seda tüüpi diferentsiaalmuundur on kujutatud joonisel 5.21. [63]
Kui ankur liigub, siis ühe mähise induktiivsus suureneb ja teisel väheneb. Mõlemad mähised on ühendatud vahelduvvoolusilla vastasõlgadesse.
Kui muundurile lisada ergutusmähis W1 ja vaadeldud mähiseid W2kasutada mõõtmiseks siis muundur muutub vastastikku induktiivseks, mida sageli nimetatakse ka lineaarselt muutuvaks diferentsiaaltrafoks (LVDT). Seda saab toota erinevate lahendustega (joonis 5.22 а ja b).
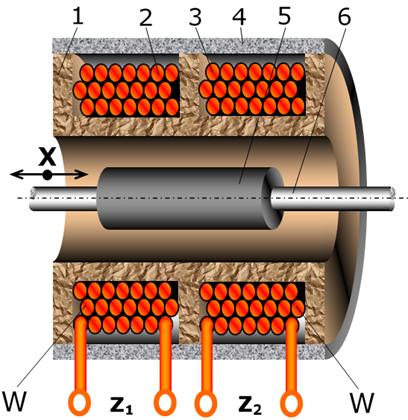
1 – isoleerivast materjalist karkass; 2 ja 3 – ühesuguse keerdude arvuga mähised W; 4 – fikseeritud ferromagnetiline silinder; 5 – ferromagnetilisest materjalist liikuv südamik; 6 – mittemagnetilisest materjalist juhikud (messing)
Joonis 5.21 Lineaarselt muutuv diferentsiaaltrafo (LVDT) [63]
a
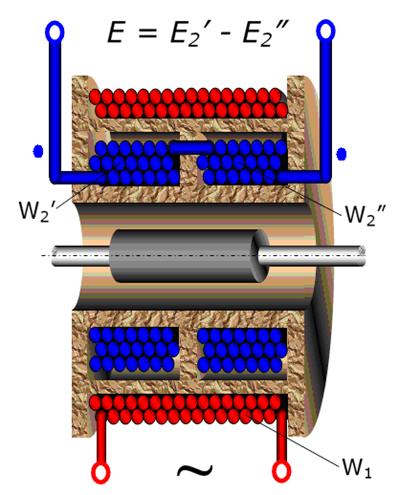
b
Joonis 5.22 Lineaarselt muutuv diferentsiaaltrafo erinevad lahendused [63]
Mahtuvuslikud mõõtemuundurid
Mahtuvuslikeks nimetatakse mõõtemuundureid, milles mõõdetav mitte-elektrilise suuruse muutuse muundatakse mahtuvuse muutuseks.
Arvestamata ääreefekti on paralleelsete plaatelektroodidega kondensaatori mahtuvus C määratud avaldisega
![]() (5.11) kus
(5.11) kus ![]() on elektroodide
vahelise keskkonna dielektriline läbitavus, s on nende pindala,
on elektroodide
vahelise keskkonna dielektriline läbitavus, s on nende pindala,![]() on nende vahekaugus,
on nende vahekaugus,![]() =8.854х10-12 F/m on vaakumi dielektriline
läbitavus,
=8.854х10-12 F/m on vaakumi dielektriline
läbitavus, ![]() on elektroodide
vahelise aine suhteline dielektriline läbitavus (õhul
on elektroodide
vahelise aine suhteline dielektriline läbitavus (õhul ![]() = 1.0006).
= 1.0006).
Seega
mahtuvuse väärtust C saab muuta ![]() , s ja
, s ja ![]() abil.
Muundusfunktsioon
abil.
Muundusfunktsioon ![]() on mittelineaarne ja
muundusfunktsioonid
on mittelineaarne ja
muundusfunktsioonid ![]() ja
ja ![]() on lineaarsed.
on lineaarsed.
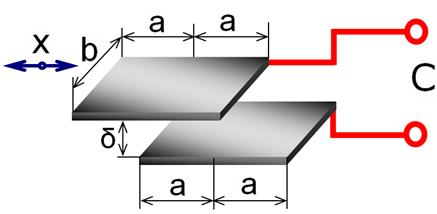
Mahtuvuslikud muundurid lineaarnihke mõõtmiseks muutmisega
Joonis
5.23 kujutab üksikut mahtuvuslikku
muundurit ![]() muutmisega.
muutmisega.
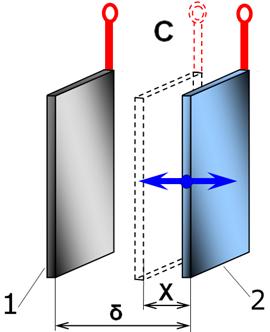
1 – fikseeritud elektrood; 2 – liikuv elektrood
Joonis 5.23 Mahtuvuslikud muundur lineaarnihke mõõtmiseks [63]
![]()
(5.12)
See muundur on tuntud kitsa lineaarsuspiirkonna poolest.
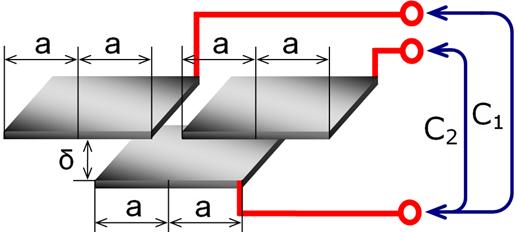
Joonis 5.24 kujutab diferentsiaalmuundurit.
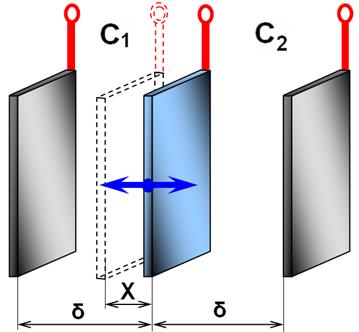
Joonis 5.24 Mahtuvuslik diferentsiaalmuundurit [63]
Võrrandid
![]()
(5.13)
![]()
(5.14)
kehtivad seda tüüpi muunduritele.
Mahtuvuslikud muundurid s muutmisega lineaar- ja nurknihke mõõtmiseks
Joonis 5.23 kujutab üksikut mahtuvuslikku muundurit, milles muutub s lineaarnihke mõõtmiseks.
Joonis 5.25 Mahtuvuslik lineaarnihkeandur
![]()
Kui elektrood liigub, siis mahtuvus väheneb alati, sõltumata nihke x suunast. See puudus on kõrvaldatud mahtuvuslikus diferentsiaalmuunduris (joonis 5.26).
Joonis 5.26 Mahtuvuslik lineaarnihkeandur
![]()
![]()
(5.17)
Joonis 5.27 kujutab üksikut mahtuvuslikku muundurit s muutmisega nurk nihkele ja joonisel 5.28 on kujutatud sama tüüpi diferentsiaalne muundur.
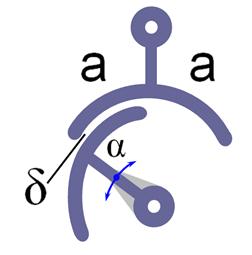
Joonis 5.27 Mahtuvuslik nurknihke andur
![]() (5.18)
(5.18)
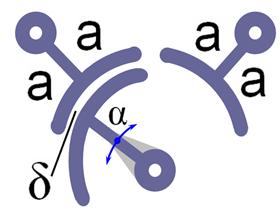
Joonis 5.28 Mahtuvuslik nurknihke andur
![]()
(5.19)
![]()
(5.20)
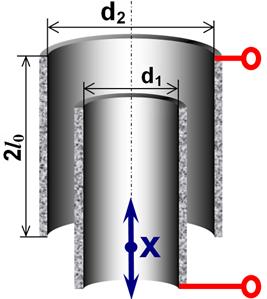
Laialdaselt kasututakse ka silindrilisi (koaksiaalseid) kondensaatoreid (joonis 5.29).
Joonis 5.29 Mahtuvuslik kondensaatorandur
Nende mahtuvus on määratud valemiga
(5.21)
kus ![]() on kahe elektroodi
ülekatte pindala ja d1 ning
d2 on sise- ja
väliselektroodi läbimõõdud.
on kahe elektroodi
ülekatte pindala ja d1 ning
d2 on sise- ja
väliselektroodi läbimõõdud.
Nendes muundurites võivad liikuda nii sisemised kui välimised silindrid.
Selle muunduri võib muuta diferentsiaalseks kolmanda silindri lisamisega, jättes ainult ühe silindri liikuvaks (joonis 5.30).
(5.22)
(5.23)
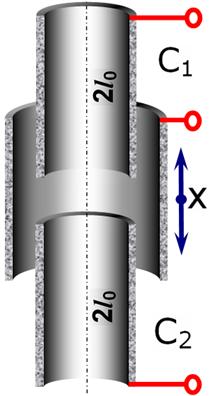
Joonis 5.30 Mahtuvuslik kondensaatorandur
Dielektrilise
läbitavuse muutmisega mahtuvuslikud muundurid  väikeste nihete ja
tasemete mõõtmiseks
väikeste nihete ja
tasemete mõõtmiseks
Selline muundur on kujutatud joonisel 5.31.
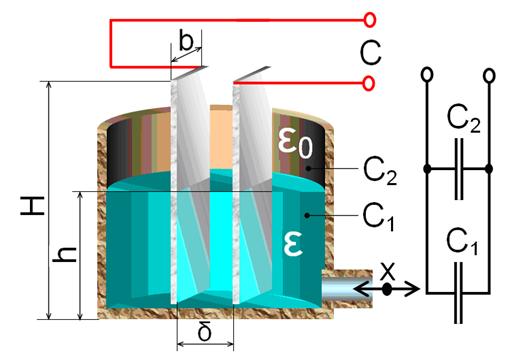
Joonis 5.31 Dielektrilise läbitavuse muutmisega mahtuvuslik muundur [63]
Kasutades paralleelsetest plaatides elektroode laiusega b, võib mahtuvusliku muunduri joonis 5.39 kohta kirjutada
![]()
(5.24)
![]()
(5.25)
![]()
(5.26)
kus C on kondensaatori mahtuvus dielektrikuga – vedelik või tahke materjal, C 2 on vastava õhkkondensaatori mahtuvus vedeliku pinna või tahke aine kohal. Kaks kondensaatorit on ühendatud rööbiti.
Sarnase valemiga võib väljendada silindrilise kondensaatori (joonis 5.33) mahtuvust
(5.27)
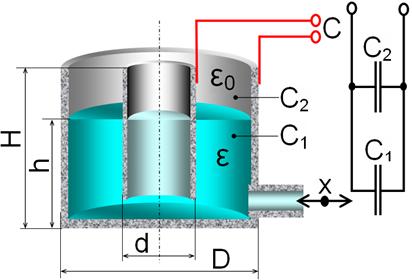
Joonis 5.32 Silindrilise kondensaatori mahtuvuse muutmine [63]
Mõlemaid
muundureid (joonised 5.31 ja 5.32) saab kasutada väikeste nihete X ja vedelikunivoo ning ühest suurema
dielektrilise läbitavusega ![]() tahkete materjalide
taseme mõõtmiseks.
tahkete materjalide
taseme mõõtmiseks.
Muundamine ![]() on mõlemal juhul
lineaarne.
on mõlemal juhul
lineaarne.
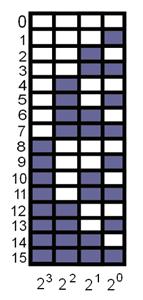
Absoluutenkooderid
Lineaarse või nurknihke mõõtmiseks on võimalik välja töötada muundur, mille väljundsignaal on otseselt digitaalne.
Absoluutenkooderid võivad olla lineaarsed (joonis 5.33а) või pöörlevad (võlliga) (joonis 5.33b). Joonisel 5.33 on sellised kahendkoodiga enkooderid.
a
n = 4
b
Joonis 5.33 Absoluutenkooderid
Kõik n bitti, mis moodustavad sõna, on moodustatud vastavalt n paralleelsele või kontsentrilisele rajale, kasutades loogilise 0 või 1 määramiseks kahte erinevat olekut:
- mittemagneetuv või ferromagnetiline pind – magnetiliseks lugemiseks;
- isoleeriv või juhtiv pind – elektriliseks lugemiseks;
- läbipaistmatu või läbipaistev pind – optiliseks lugemiseks.
Optilist lugemist kasutatakse väga sageli ja igale rajale on allikas – elektromagnetiline diood ja vastuvõtja – fototransistor.
Elementide arv N igal rajal määrab resolutsiooni:
- lineaarenkooderitel pikkusega L see on L /N
- pöördenkooderitel see on 360 °
Vahetu kahendkoodi saamiseks tuleb saadud infot töödelda arvutusseadmega. Siiski, kuna teatud kahendarvude muutmisel ühe võrra võib korraga muutuda mitu bitti, võib tekkida lugemisviga.
Vale lugemit saab vältida järgnevatel viisidel:
- kood, milles elementaarnihkel muutub ainult üks bitt (tavaliselt need on spetsiaalsed koodid, näiteks Gray kood);
- otsene kahend- või BCD-kood täiendava lugemisseadisega, mis võimaldab vältida mitmetähenduslikku lugemit üleminekutsoonides (kasutatakse kaherajalisi koodikandjaid). Selle näiteks on U-kujuline salvestis.
Optilised muundurid
5.6.1. Optilised asendimuundurid
Sellise muunduri lihtsustatud skeem on näidatud joonisel 5.34.
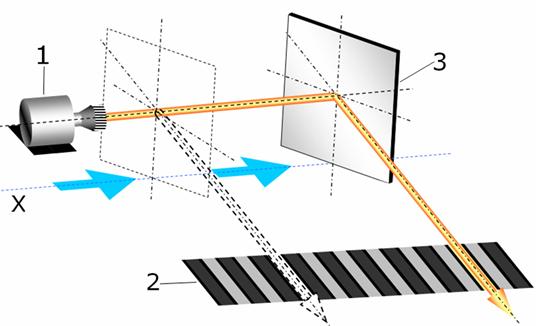
1 – laser; 2 – fotodioodid; 3 – barjäär
Joonis 5.34 Optiline asendimuundur [63]
Valgusallikaks kasutatakse laserit. Laserkiir peegeldub barjäärilt, mis liigub koos objektiga, mille asendit määratakse. Peegeldunud kiir satub vastavatesse kiirgust vastu võtvatesse fotodioodidesse.
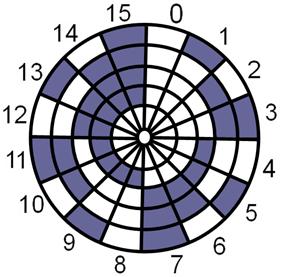
Optilised (suhtelised) inkrementaalenkooderid
Nendega saab määrata objekti nihkeid, aga ka pöörlemiskiirust, kasutades paari rada (2 või 3), mis on vähem keeruka maskiga, võrreldes absoluutenkooderitega.
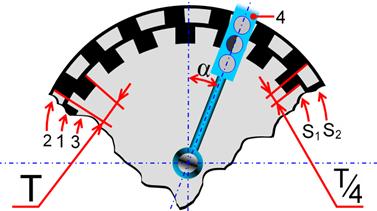
Kaks kontsentrilist (pöördenkooderil) või rööbitist rada (lineaarenkooderil) on jaotatud N võrdseteks vahelduvateks läbipaistmatuteks ja läbipaistvateks elementideks (sammudeks). Ühel radadest on elemendid teise suhtes nihutatud veerandi sammu võrra (Т/4). Vahel lisatakse kolmas rada (millel on ainult üks läbipaistev element), mis võimaldab pöörete loendamist ja loenduri nullimist (joonis 5.35).
Joonis 5.35 Optiline inkrementaalenkood
Iga rada loetakse optilise paariga: valgusallikas (valgusdiood) ja vastuvõtja (fototransistor), on paigutatud ketta (laua) vastaskülgedele.
Nihke suuna
määramiseks kasutatakse elektroonikaskeemi. See võimaldab alates raja 1
signaalist S tunda ära
nende tõusvaid {># ![]() või laskuvaid $
või laskuvaid $ ![]() külgi ning sõltuvalt teise raja signaali S2 olekust (0 või 1) samal
hetkel (joonis 5.36).
külgi ning sõltuvalt teise raja signaali S2 olekust (0 või 1) samal
hetkel (joonis 5.36).
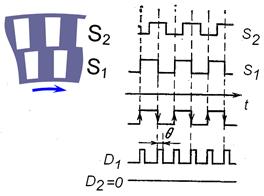
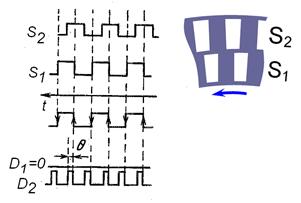
Joonis 5.36 Optiline inkrementaalenkood
Püsimagnetmuundurid
Nende muundurite töö põhineb elektromagnetilise induktsiooni seadusele.
Nad koosnevad püsimagnetist (vahel elektromagnetist) ja mähisest. Sisendsuuruse, mis võib olla lineaarne või nurkliikumine, muutus kutsub esile mähise aheldusvoo muutuse, mille tulemusena indutseeritakse mähises sisendsuuruse muutusega võrdeline elektromotoorjõud. Need on generaatoritüüpi muundurid.
Indutseeritud e.m.j. on määratud avaldisega
![]()
(5.28)
kus ![]() on magnetvoo muutuse
väärtus. See väärtus sõltub sisendsuuruse muutuse suurusest.
on magnetvoo muutuse
väärtus. See väärtus sõltub sisendsuuruse muutuse suurusest.
Arvestades sõltuvust (5.28), kehtib siinuselisele magnetvoole
![]()
(5.29)
indutseeritud elektromotoorjõu väärtuseks saame
![]()
(5.30)
Indutseeritud e.m.j. sõltub magnetvälja muutumise kiirusest. Sellest väärtusest sõltub ka tema sagedus lineaarnihkele.
Püsimagnetmuundurite tüübid
Püsimagneti ja väljundsuuruse poolt mõjutatava mähise vastastikuse asendi põhjal. See tüüp on jaotatud kaheks täiendavaks alamtüübiks:
- fikseeritud magneti ja liikuva mähisega;
- fikseeritud mähise ja liikuva magnetiga;
- fikseeritud magneti ja mähisega, kus vastavalt sisendsuurusele muutub kolmanda komponendi asend.
Liikuva mähisega püsimagnet-muundurid
- nurga nihkele
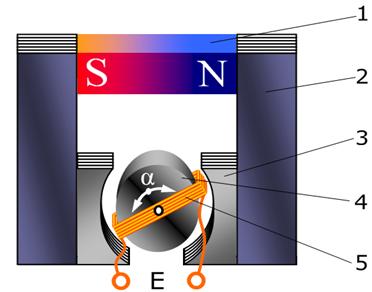
>1 – püsimagnet; 2, 3, 4 – ferromagnetilised elemendis; 5 – mähis, mis pöörleb sisendsuuruse mõjul
Joonis 5.37 Liikuva mähisega püsimagnet-muundur [63]
1 – mittemetalliline mähisekarkass; 2 – liikuv mähis, mis on seotud sisendsuuruse muutustega; 3 – püsimagnet; 4 – magnetsüdamik
Joonis 5.38 Liikuva mähisega püsimagnet-muunduri tööpõhimõte
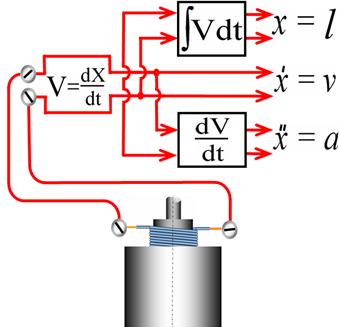
Indutseeritud
e.m.j. on võrdeline kiirusega ![]() Kasutades integreerivat või diferentseerivat muundurit,
võib väljundis saada signaali, mis on võrdeline vastavalt nihkega X või kiirendusega a
Kasutades integreerivat või diferentseerivat muundurit,
võib väljundis saada signaali, mis on võrdeline vastavalt nihkega X või kiirendusega a
Püsimagnet-muundurid liikuva magnetiga
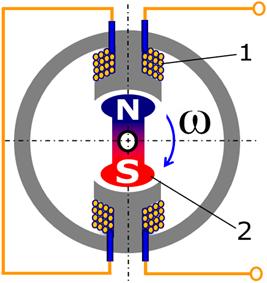
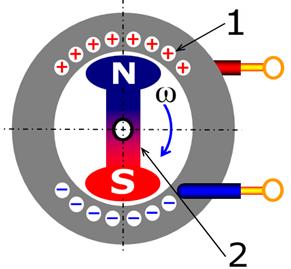
1 – mähis; 2 – püsimagnet
Joonis 5.39 Püsimagnet-muundur liikuva magnetiga
Sellisel juhul saame sarnaselt, et indutseeritud e.m.j. on võrdeline nurkkiirusega, s. t.
![]()
kus S w on nurkkiirus.
Püsimagnet-muundurid, mis põhinevad kolmanda elemendi liikumisele
Muunduri püsimagnet ja mähis on statsionaarsed.
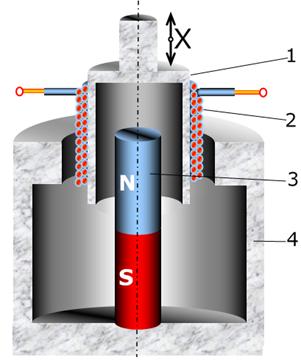
lineaarnihkele (joonis 5.40)
Magnetsüdamik on silindrilise kujuga. Mähis on kinnitatud silindrilise osa keskele, mis on püsimagnet. Ferromagnetiline element (ankur) liigub magneti ja magnetsüdamiku vahelises pilus. Kui ankur liigub, siis õhupilu magnetiline takistus muutub, mis tekitab magnetvoo muutuse.
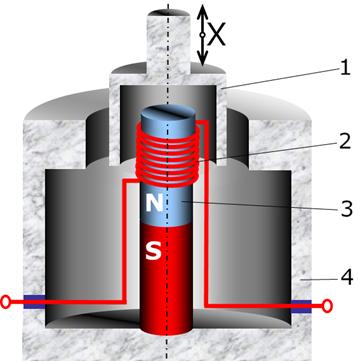
1 – liikuv ferromagnetiline element; 2 – mähis; 3 – püsimagnet; 4 – magnetsüdamik
Joonis 5.40 Püsimagnet-muundur, mis põhinevad kolmanda elemendi liikumisele [63]
pöörlemiskiiruse mõõtmiseks (joonis 5.41)
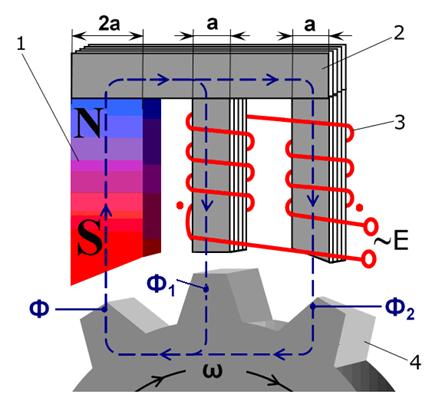
1 – püsimagnet; 2 – magnetsüdamik; 3 – liikuv element – ülekande ratas; 4 – mähis
Joonis.5.41 Püsimagnet-muundur,pöörlemiskiiruse mõõtmiseks [63]
Püsimagnetvoog Ф on sama, kuid jaotatud erineval viisil kahe samba vahel sõltuvalt faktist: milline osa (hammas või vahekoht) satub vastava samba alla. Õhupilu magnetiline takistus magnetsüdamiku samba ja ratta vahel on minimaalne, kui hammas on samba all ja maksimaalne, kui seal on hammaste vahekoht. Ülejäänud juhtumitel takistuse väärtus on miinimumi ja maksimumi vahel. Sellega muutub diferentsiaalselt ühendatud mähiseid läbiv magnetvoog Ф1 ja Ф2 ja indutseeritakse e.m.j.
![]()
(5.32)
mis sõltub ketta pöörlemise nurkkiirusest.
Piesoelektrilised muundurid
Mõjuva jõu võrrandist
![]()
(5.33)
kus m on mass ja a on kiirendus, järeldub, et piesomuundureid saab kasutada dünaamiliste (ajas muutuvate) jõudude mõõtmiseks (kuni 104N) ja kiirenduste (kuni 1000 g) mõõtmiseks vahemikus 0,5 kuni 100 Hz. Kui kasutatakse täiendavalt ühte või kahte integreerivat elementi, siis võib mõõta teisi liikumisparameetreid: kiirused või аmplituudid (näiteks. vibratsiooni parameetrid: vibratsiooni amplituud, kiirus ja kiirendus).
