
ANDURID
Sõltuvalt väljundsignaali tüübist eristatakse analoog-, sagedus- ja digitaalväljundiga andureid. Sõltuvalt signaali edastamise keskkonna tüübist jaotatakse andurite liidesed kahte rühma: juhtmega ja juhtmeta.
Analoog-pingeväljundiga andurid
Seda tüüpi andurite väljundsignaaliks on pinge, mis muutub koos anduri sisendsignaaliga. Pingeväljundiga andurite puudus: signaali ei saa edastada pikkade vahemaade taha juhtmete pingelangude tõttu ning samuti tekkivate mürahäiringute mõju liitub signaaliga ja suurendab seda. Müra võib pärineda lähedalasuvatest mootoritest, kontaktoritest ja igat tüüpi elektromehaanilistest seadmestikust. See mõjutab negatiivselt mõõtetäpsust ja sageli on vajalik mõõtemomendil müra eemaldada või vähendada, kasutades sobivaid analoog- või digitaalfiltreid.
Vooluväljundiga andurid
Vooluväljundiga (joonis 10.1) anduri liides tekitab väljundis voolu, mis muutub vastavalt mõõdetavale suurusele. Erinevalt pingeväljundiga anduritest võib vooluväljundiga anduri signaali edastada pikemate vahemaade taha ja häiringud mõjutavad seda vähem. Vooluväljundile on välja arendatud erinevaid standardeid, kuid enim rakendatav on 4-20 mA standard. Vähim väärtus anduri mõõtealas vastab 4 mA ja suurim – 20 mA väljundvoolule. Anduri näidud jäävad vahemikku 4 kuni 20 mA. Vooluväljund tagab alati nõutud voolu väljundahelas. Sedasi saab anduriga ühendatud seade voolu katkemisel kergesti tuvastada anduri probleemi (näiteks katkenud juhe). Signaali saab kergesti muuta pingeks 250 Ω takistiga, mille pingelang muutub vahemikus kuni 5 V ja seda saab kergesti mõõta programmeeritava kontrolleriga (PLC-ga) või digitaal-analoog-muunduriga.
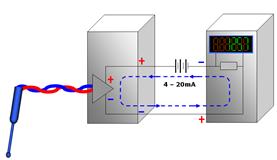
Joonis 10.1. Vooluväljundiga andur [63]
Andurite andmevahetuseks 4-20 mA liidese baasil on välja töötatud HART protokoll. Infovahetuse digitaalinfo liidetakse analoogsignaalile.
Sagedussignaali ja pulsilaiusmodulatsiooniga (PWM) andurid
Sagedusväljundiga andureid võib lugeda pooldigitaalseteks ning nende väljundiks on sagedus, periood, lülituskestus, ajavahemik või faasinihe. Sagedusväljundiga andureid iseloomustavad järgmised eelised:
- suur häiringukindlus. Sagedussignaale saab, analoogsignaalidega võrreldes, edastada suuremate vahemaade taha ja nad säilitavad hea mürakindluse. Nad sobivad eriti hästi suurte häiringutega tööstuskeskkonna rakendustesse;
- signaaliedastus on energiasäästlik. Erinevalt analoogväljundiga anduritest, sagedusväljund säästab signaali energiat edastamisel suurte vahemaade taha, kuna pole tarvis eelvõimendust;
- sagedussignaalide mõõtmise kõrge täpsus. See saavutatakse laialt levinud kristallresonaatorite baasil, mis praktikas on stabiilsemad kui analoogpinge mõõtmisel kasutatavad tugipingeallikad.
Võrreldes pingeväljundiga anduritega, sagedusväljundiga andurid ei vaja signaali mõõtmiseks täiendavaid osi, nagu analoog-digitaal-muundureid. Nende viga sagedussignaali muundamisel digitaalkoodiks on tühiselt väike (0,001% suurusjärgus). Sedasama mõõdetud suuruse muundamist sagedussignaaliks võib vaadelda kui ajalise integreerimise protsessi, mille jooksul võimalikud mürad filtreeritakse välja. [60]
Sagedusväljundiga andurid
Sagedussignaal on signaali korduv jada etteantud aja jooksul. Signaali tsüklit nimetatakse perioodiks. Sageduse ja perioodi suhe on järgmine:
![]()
(10.1)
kus f on sagedus ja T on periood.
Sagedusväljundiga andurite väljund on sageli nelinurksignaal (joonis 10.2) ja selle sagedus muutub koos anduri sisendiga. Tekitatud sagedus näitab mõõdetava parameetri olekut.
Joonis 10.2 Sagedusväljundiga anduri nelinurksignaal
Pulsilausmodulatsioonväljundiga (PWM) andurid
Seda tüüpi andurite väljundsignaal on nelinurksignaal (joonis 10.3), mille lülitatud oleku kestus väärtus muutub. Lülituskestuse muutused annavad teavet anduriga mõõdetavast väärtusest.
 >
>
Joonis 10.3. Pulsilausmodulatsioonväljundiga (PWM) anduri väljundsignaal
Digitaalsed liidesed
Liidesed RS-485 baasil
RS485 standard on laialt levinud andmete kogumiseks ja juhtimiseks, võimaldades ühisesse võrku ühendada arvukalt seadmeid. Andmete edastamiseks kasutatakse kahejuhtmelist diferentsiaalsignaali (A ja B). Mürakindluse suurendamiseks kasutatakse keerupaarikaablit. (Joonis 10.4).

Joonis 10.4 Liides RS-485 baasil [60]
RS485 on eelistatud liides tööstussüsteemide kommunikatsiooniks ja eriti andurite ühendamiseks, kuna ühisesse võrku saab ühendada arvukalt ülem- ja alluvseadmeid.
Standardina saab ühisesse võrku ühendada kuni 32 seadet, kuid teatud momendil ainult üks seade on ülemseade ja ülejäänud on alluvseadmed. Seadmed ühendatakse ühtsesse võrku ja siini mõlemasse otsa ühendatakse takistid.
RS485 standardile põhineb arvukalt kõrgema taseme andmevahetusprotokolle, nagu Modbus, mis on automaatikas laialt levinud.
CAN liides
CAN protokoll töötati algselt välja autotööstusele, kuid hiljem rakendati seda laialdaselt tööstusautomaatikas. See on töökindel andmevahetusprotokoll, milles sõnumeid edastavad võrgu üksikud seadmed. Nende eelistus määratakse erilise sõnumitunnusega. Seadmed on ühendatud ühisesse võrku. Nn kokkupõrgete vältimiseks (see on juhtum, mil kaks seadet hakkavad edastama samaaegselt), rakendatakse CSMA/CD (Carrier Sense Multiple Access with Collision Detection) toimemehhanismi. Seadmed jälgivad, kas võrk on vaba, ja alustavad saatmist, kui teist sõnumit ei edastata. Kui samal momendil teine seade alustab edastamist, siis toimub võrgus bitikaupa arbitreerimine. Arbitreerimise võidab seade, mis edastab loogilise nulli, kusjuures seade, mis proovis edastada loogilist ühte, peatab edastamise ja ootab siini uut vabanemist. CAN protokolli baasil on välja arendatud kõrgema taseme CANopen protokoll, mis võimaldab ühendada erinevate tootjate andureid jm seadmeid.
Integreeritud andurite SPI ja I2C liidesed
Seda tüüpi liidest kasutatakse integreeritult toodetud andurites (kasutatakse integraalskeemidena) või trükkplaadile paigaldamiseks ettenähtud andurites. Mõlemal liidesel on ülemseade ning üks või enam sellega ühendatud alluvseadet. Ülemseade alustab kommunikatsiooni, valib seadme, millega andmevahetus toimub, ning juhib taktsignaali.
SPI liidese kommunikatsioon teostatakse neljal viisil: MISO – ülemseadme sisend – alluvseadme väljund (master input – slave output); MOSI – ülemseadme väljund – alluvseadme sisend (master output-slave input); SCLK – jadasignaali takt (serial clock); SS – alluvseadme valik (slave select) (aktiivse nulltasemega). Joonis 10.5 kujutab ülem- ja alluvseadme ühendusviisi.
Joonis 10.5 Ülem- ja alluvseadme ühendusviis [60]
I2C liides kasutab jada-andmevahetuseks kahte juhet: SDA – jada-andmed (serial data) ja SCL – jada-kell (serial clock) (joonis 10.6). Mõlemas juhtmes tuleb ühendada toitepingega nn pingetõstetakistid.
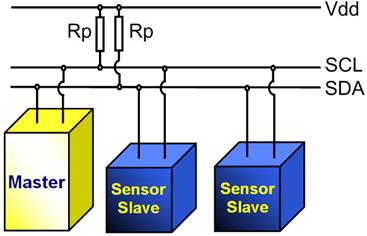
Joonis 10.6 SDA – jada-andmed (serial data) ja SCL – jada-kell (serial clock) [60]
IEEE 1451.4
IEEE 1451.4 on üks standarditest, mis kirjeldavad nutiandurite ühendamisviise. IEEE 1451.4 määratleb mitmed nutiandurite tähtsad elemendid, tuginedes nende tööpõhimõttele ja liidesele.
Standardi põhiidee on anduri võime säilitada teavet iseenda kohta, mis muudab tema kasutamise lihtsaks. Anduris säilitatav info puudutab seadme tüüpi, seerianumbrit, mõõtevahemikku, viimase kalibreerimise kuupäeva jne. Need andmed leiduvad anduri EEPROM mälus ja on korraldatud nn mõõtemuunduri elektrooniliste andmelehtedena (TEDS – Transducer Electronic Data Sheets).
Standardi IEEE 1451.4 (joonis 10.7) põhjal salvestatakse anduri analoogsignaal ja samal ajal lisatakse jadakommunikatsiooni võimalus TEDS-ist säilitatavate andmete lugemiseks.
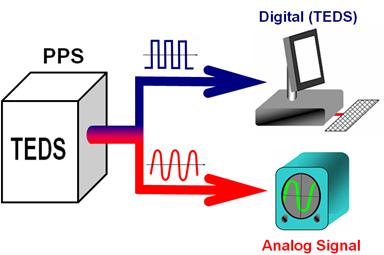
Joonis 10.7. TEDS süsteem [63]
Digitaalsed juhtmevabad liidesed
ZigBee
ZigBee standard on loodud juhtmevaba andmevahetusega jälgimis- ja juhtimissüsteemide töökindluse suurendamiseks. See on uus standard, mis põhineb standardil IEEE 802.15.4 ja see määratleb võrgukihi, turvakihi ja kasutuskihi. Sellega lihtsustub juhtmevabade seadmete välmimine ja võimaldatakse andmesidet erinevate tootjate toodete vahel.
IEEE 802.15.4 standard määratleb mitmete raadiosagedusribade füüsikalised ja kanalikihid, kaasa arvatud 868 MHz, 915 MHz ja 2,4 GHz. Standard on välja töötatud madala energiakuluga töökindla kommunikatsiooni tagamiseks. IEEE 802.15.4 on paketipõhine protokoll. ZigBee laiendab selle uue raadistandardi mahtusid, määratledes paindliku ja töökindla võrgukihi, mis toetab erinevaid arhitektuure töökindla juhtmevaba kommunikatsiooni tagamiseks.
Standardis on määratletud kolme tüüpi ZigBee võrku ühendatavad seadmed: ZigBee koordinaator – ZC; ZigBee ruuter – ZR ja ZigBee lõppseade (end device) – ZED. Igas ZigBee võrgus on üks koordinaator, mis praktiliselt tekitab võrgu ning ühendab või eemaldab seadmeid. ZigBee ruuter võib suunata sõnumeid võrgu naaberseadmetelt teistele seadmetele. ZigBee lõppseadmed ei saa suunata sõnumeid, kuid need võivad olla patareitoitega seadmed, mis lülituvad võrku lühikeseks ajaks, vahetavad infot teiste võrgus olevate seadmetega ning lülituvad vähese energiatarbega režiimi. ZigBee liidesega andurid talitlevad peamiselt lõppseadmetena ja nad on kohandatud patareitoitele.
ZigBee toetab kolme tüüpi võrguarhitektuure (joonis 10.8): täht (a), puu (b) ja silmus (c).
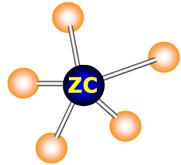
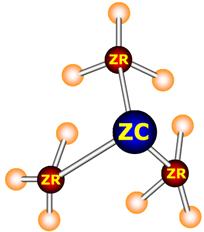
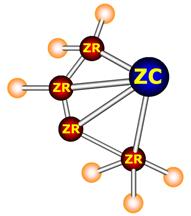
| a | b | c |
Joonis 10.8. ZigBee
ZigBee standardit võidakse tulevikus uuendada, kuid selle peamine eelis on juhtmevabade andurite võrkude ehitamise võimalus.
