
ANDURID
RÕHUANDURID
Rõhu füüsikalised omadused
Füüsikaline kontseptsiooni rõhk on määratud kui kindlale pinnale rakendatud jõu mõju. Rõhku kirjeldatakse kui
![]() (4.1)
(4.1)
kus P on rõhk, F on jõud ja S on pindala, millele jõud on rakendatud.
SI süsteemi rõhuühik
on Pa (Pascal). Üks Pa on määratud kui üks N (Newton) m2 (ruutmeetrile) – ![]() . Lisaks paskalitele Pa kasutatakse praktikas sageli ka teisi
mõõtühikuid nagu: psi (naela ruuttollile), atm (atmosfäär), bar, millimeetrit
elavhõbedasammast, mida on sageli nimetatud ka torriks.
. Lisaks paskalitele Pa kasutatakse praktikas sageli ka teisi
mõõtühikuid nagu: psi (naela ruuttollile), atm (atmosfäär), bar, millimeetrit
elavhõbedasammast, mida on sageli nimetatud ka torriks.
Rõhuühikute teisendused heakskiidetud SI ühikuks Pa on tabelis 4.1.
Tabel 4.1
Ühik |
Teisendamine paskaliteks Pa |
1 psi |
6894.757 |
1 bar |
100000 |
1 atm |
101325 |
1 torr |
133.322 |
Rõhu mõõtmiseks võib tutvustada järgmisi põhimõtteid:
atmosfäärirõhk: see on atmosfääri rõhk maapinnal. Atmosfäärirõhuks merepinnal eeldatakse 101.325 kPa. See rõhk väheneb kõrguse suurenedes.
Rõhk 0 Pa on täielik vaakum.
Vaakumiks nimetatakse rõhkusid täielikust vaakumist atmosfäärirõhuni.
Rõhuandurite tüübid vastavalt mõõtetehnikale
Praktikas mõõdetakse peamiselt gaasige ja vedelike rõhku. Rõhu mõõtmiseks erinevates põhitehnikates on välja töötatud suur hulk andureid.
Absoluutse mõõtmisega
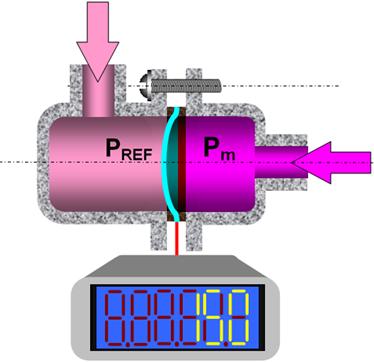
Seda tüüpi anduritega (joonis 4.1) määratakse rõhku vaakumis suhtes.
Joonis 4.1 Rõhuandur määratakse rõhku vaakumis suhtes [63]
Näidikandurid
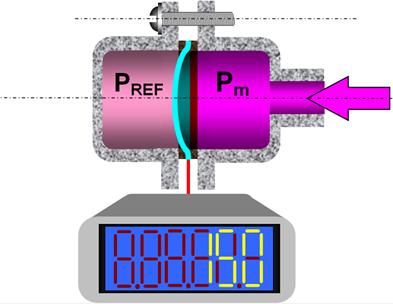
Seda tüüpi andurid mõõdavad rõhku atmosfäärirõhu suhtes. (joonis 4.2). Referentsrõhuna kasutatakse atmosfäärirõhku. Üks variant seda tüüpi andureid määrab rõhku atmosfäärirõhu suhtes merepinnal.
Joonis 4.2. Rõhuandur määratakse rõhku atmosfääriõhu suhtes [63]
Diferentsiaalse mõõtmisega
Seda tüüpi andurid (joonis 4.3) mõõdavad rõhku teatud referentsrõhu suhtes. Nende andurite tööpõhimõte sarnaneb näidikanduritele, kuid referentsrõhk erineb atmosfäärirõhust ja andur mõõdab erinevust rakendatud ja referentsrõhu erinevust.
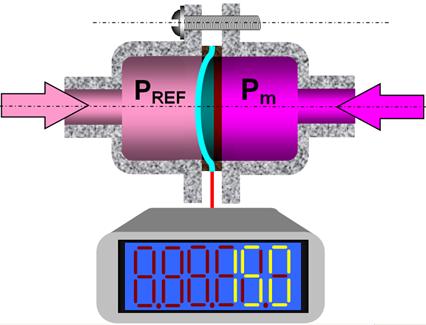
Joonis 4.3 Rõhuandur mõõdavad rõhku teatud referentsrõhu suhtes [63]
Andurite tüübid vastavalt nende tööpõhimõtetele
Rõhu mõõtmiseks on välja töötatud palju erinevate mehaaniliste konstruktsioonidega või vedeliku torus liikumisele põhinevaid rõhuandureid. Automaatikas kasutamiseks pakuvad huvi elektrilise väljundsignaaliga rõhuandurid, mida saab ühendada mingit liiki jälgimis- ja juhtimisaparatuuriga.
Kõige laialdasemalt kasutatavate rõhuandurite ehituses kasutatakse diafragmat. Membraan on plaat, mis paindub rõhu rakendamisel, ja kõrvalekalle sõltub rakendatud rõhust.
Allpool käsitletakse mõnede praktikas laialdaselt rakendatavate andurite kõige tavalisemaid konstruktsioone.
Vastastikku induktiivsed andurid
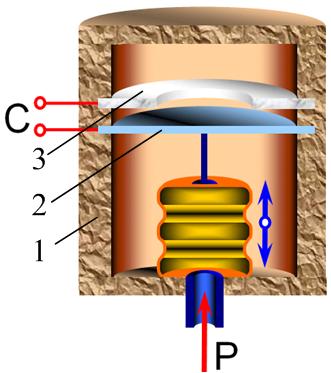
Seda tüüpi andurid sisaldavad diferentsiaaltrafot, mille magnetahel on ühendatud anduri membraaniga (joonis 4.4). Rõhu rakendamisel membraan paindub, mille tulemusena diferentsiaaltrafo südamik nihkub. Trafo kaks sekundaarmähist on ühendatud vastasfaasides. Primaarmähist toidetakse siinuselise pingega. Kui südamik on trafo magnetilises keskmes, siis trafo väljundsignaal on null. Kui südamik nihkub, siis väljundpinge amplituud muutub sõltuvalt nihkest. Nihke suuna määramiseks saab kasutada faasinihet sisend- ja väljundsignaalide vahel.
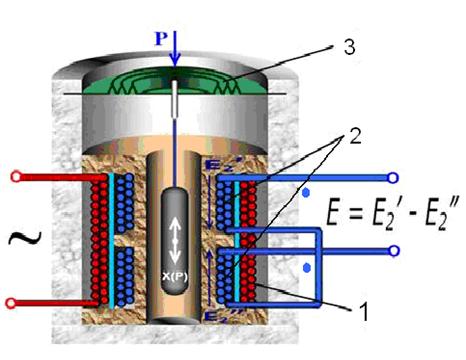
1- primaarmähis; 2- sekundaarmähised; 3- membraan
Joonis 4.4 Vastastikku induktiivne andur [63]
Mahtuvusandurid
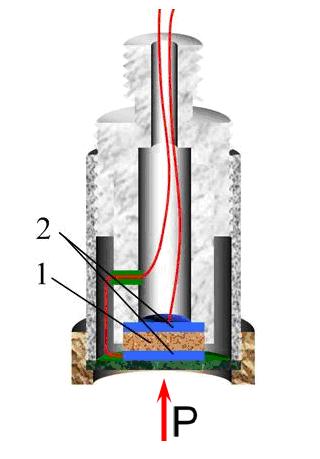
Membraan deformeerub rõhu rakendamisel. Viimane täidab kondensaatori plaadi rolli (joonis 4.5). Kui see nihkub, siis kondensaatori mahtuvus muutub. Sobiva elektroonikaskeemiga saab mahtuvuse muutuse lihtsalt teisendada anduri väljundsignaali muutuseks.
1- anduri kest; 2- membraan; 3 - elektrood
Joonis 4.5 Mahtuvusandur [63]
Piesoelektrilised andurid
Seda tüüpi andurites kasutatakse andurimembraaniga ühendatud ühe või mitme piesokristalli piesoelektrilist efekti (joonis 4.6). Kui membraan nihkub, siis piesokristall tekitab laengu, mis sõltub membraanile rakendatud rõhust.
1- piesoelektriline element; 2 - elektroodid
Joonis 4.6 Piesoelektriline andur [63]
Seda tüüpi andurid sobivad dünaamiliselt muutuva rõhu mõõtmiseks.
Tensoandurid
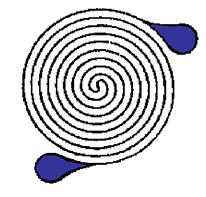
Seda tüüpi andurid kasutatakse kõige laialdasemalt. Tensoanduritega konstruktsioone on välja töötatud suurel hulgal. Tensoandurid valmistatakse sobivate kujudega (joonis 4.7) ja nad paigutatakse deformeeruvale membraanile.
a
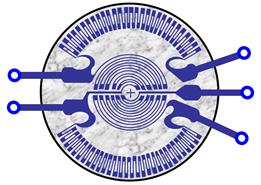
Joonis 4.7 Tensoandurid
Rõhu mõjul membraani kuju muutub ja see põhjustab tensoandurite kuju muutuse. Seega muutub nende takistus. Takistuse muutuse saab lihtsalt muundada väljundsignaaliks, mis vastab andurile rakendatud rõhule. Joonisel 4.7 kujutatud tensoanduri element sisaldab 4 rõhu tensoandurit, mis moodustavad alalisvoolusilla 4 õlga.
Optilised andurid
Optilise andurid võivad talitleda valguse peegeldumise või ülekande põhimõttel (joonis 4.8).
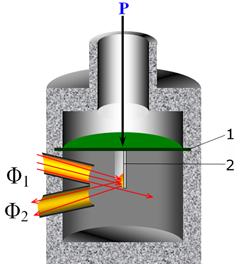
a
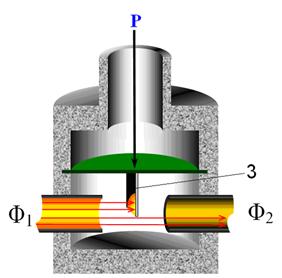
b
1 – membraan; 2 – peegeldav element; 3 - barjäär
Joonis 4.8 Optilised andurid [63]
Esimest tüüpi andurites (joonis 4.8а) peegeldav element on paigutatud membraanile, mis sõltuvalt rakendatud rõhust ja membraani paindumisest peegeldab teatud hulgal temale langevat valgust tagasi vastuvõtjale. Valguse ülekandega andurites (joonis 4.8b) membraanile kinnitatud barjäär vähendab rõhu tõustes vastuvõtjale langeva valguse hulka.
