
Elektriajamite elektrimasinad
Elektrivool on elektronide suunatud liikumine. Negatiivselt laetud elektronid liiguvad alati positiivselt laetud ehk suurema potentsiaaliga elektroodi poole. Elektrivoolu kokkuleppeline suund on valitud plussklemmilt miinusklemmile ehk suurema potentsiaaliga klemmilt väiksema potentsiaaliga klemmile. Seega on elektrivoolu kokkuleppeline suund vastupidine elektronide liikumise suunale. Vooluga juhi ümber tekkib magnetväli. Magnetvälja jõujoonte suund määratakse parema käe kruvireegliga, s.t. kruvi pööramisel liigub kruvi voolu suunas, kruvipea pöördub aga magnetvälja voojoonte suunas. Elektromehaaniline energiamuundus-protsess põhineb inglise füüsiku M. Faraday poolt 1831. a. avastatud elektromagnetilise induktsiooni nähtusel. Elektromagnetiliseks induktsiooniks nimetatakse nähtust, mille korral magnetvälja toimel indutseeritakse juhtmes elektromotoorjõud. Seejuures eristatakse kolme võimalust:
- juhe liigub paigalseisva magnetvälja suhtes,
- magnetväli liigub paigalseisva juhtme suhtes,
- juhe ja magnetväli püsivad paigal kuid voolutugevus ja sellest tulenevalt ka magnetvoo tihedus muutuvad ajas.
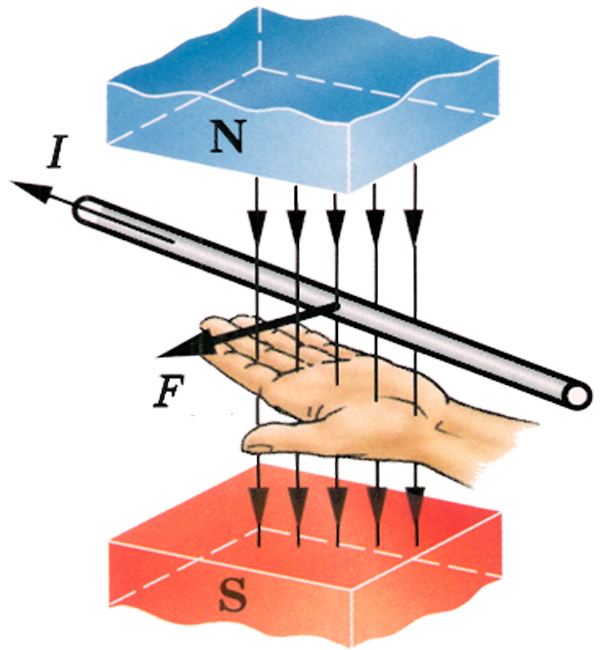
Indutseeritud elektromotoorjõu suund määratakse parema käe reegliga (joonis 4.1). Kui magnetvälja jõujooned suunduvad peopessa ja pöial näitab juhtme liikumise suunda, siis väljasirutatud sõrmed näitavad indutseeritud elektromotoorjõu suunda.
![[joonis]](assets/parem.jpg)
Allikas: ??????? ?????? ????, http://el-mashin.narod.ru
Indutseeritav elektromotoorjõud on seda suurem, mida suurem on magnetvoo tihedus ja mida kiiremini juhe magnetväljas liigub, s.t.
E=Blvsin?,
kus E on indutseeritud elektromotoorjõud voltides (V), B on magnetvoo tihedus ehk induktsioon teslades (T), l on magnetväljas liikuva juhtme pikkus meetrites (m), v on juhtme liikumiskiirus (m/s) ja ? on juhtme liikumissuuna ja magnetvälja jõujoonte vaheline nurk.
Kui indutseeritud elektromotoorjõuga juhe moodustab suletud elektriahela, siis tekib suletud ahelas elektrivool i. Voolu suuruse saab aktiivtakistusega elektriahelas arvutada Ohmi seaduse põhjal
i = E / R, kus i on vool amprites (A) ja R on elektriahela takistus oomides (?). Voolu suuna saab määrata Lenzi reegli põhjal.
Indutseeritava elektromotoorjõu poolt tekitatud voolu suund on alati niisugune, et ta töötab vastu voolu tekitavale nähtusele (s.t. juhtme või magnetvälja liikumisele või magnetvälja muutumisele).
Järelikult tekitab magnetväljas asuv vooluga juhe jõu, mille suund sõltub nii magnetvälja jõujoonte suunast kui ka voolu suunast. Jõu suund määratakse vasaku käe reegliga (joonis 4.2). Kui magnetvälja jõujooned suunduvad peopessa ja väljasirutatud sõrmed näitavad voolu suunda, siis pöial näitab juhtmele mõjuva jõu suunda.
Juhtmele mõjuv jõud on seda suurem, mida pikem on juhe ning mida suuremad on magnetvoo tihedus ja juhet läbiv vool, s.t.
F=Bilsin? Jõu suund võib olla liikumisele, s.t. kiiruse suunale vastu, või kiirusega samasuunaline. Esiteks, kui juhet liigutada mingi välise jõu toimel, indutseeritakse juhtmes elektromotoorjõud, mida saab kasutada voolu tekitamiseks suletud elektriahelas
Allikas: ??????? ????? ????, http://el-mashin.narod.ru
Sel juhul on tegemist elektrienergia generaatoriga, milles mehaaniline sisendenergia muundatakse elektriliseks väljundenergiaks.
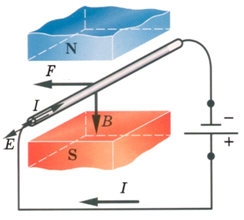
Kui tekitada välise elektromotoorjõu allikaga juhtmes vool I ning asetada vooluga juhe magnetvälja, siis mõjub juhtmele jõud, mis paneb selle liikuma jõu suunas (joonis 4.3). Sel juhul on tegemist elektrimootoriga, mis muundab elektrienergia mehaaniliseks liikumiseks.
Allikas: ??????????? ?????????? ? ????????? ????, http://el-mashin.narod.ru .
Elektrimasin võib töötada nii elektrienergia generaatorina kui ka energia tarbijana. Elektrimasinaid liigitatakse sõltuvalt vooluallikast alalis- ja vahelduvvoolumasinateks, viimaseid omakorda tööpõhimõtte järgi asünkroon- ja sünkroonmasinateks.
Elektrimasinad koosnevad magnetahelast ja elektriahelatest. Suurema kasuteguri saamiseks peab magnetahelal olema hea magnetiline juhtivus ning elektriahelal hea elektrijuhtivus. Seepärast valmistatakse magnetahelad ferromagnetilisest materjalist ja masina mähised vasktraadist. Vahelduvmagnetväljade puhul kasutatakse elektrimasina magnetahelas pöörisvoolukadude vähendamiseks elektrotehnilist lehtterast. Püsimagnetvälja tekitamiseks kasutatakse nii elektromagneteid kui ka püsimagneteid. Kuna magnetahelasse kuulub ka masina staatori ja rootori vaheline mittemagnetiline õhupilu, siis püütakse masina kasuteguri suurendamiseks teha õhupilu võimalikult väikeseks.
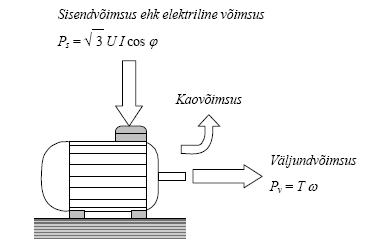
Energia muundamine elektrimasinas on paratamatult seotud kadudega. Kaod tekivad:
- voolu kulgemisel läbi masina mähiste. See kadu on tingitud mähise aktiivtakistusest ning kuna tegemist on vaskjuhtidega, nimetatakse vastavat kadu elektrimasina vaseskaoks;
- magnetsüdamikus ajaliselt muutuva magnetvälja toimel hüstereesist ja pöörisvooludest. Seda kadu tuntakse masina teraseskaona (ka rauaskaona). Teraseskadu on seda suurem, mida suurem ja massiivsem on magnetahel ning mida laiem on magnetmaterjali hüstereesisilmus ja suurem ümbermagneetimise sagedus;
- masinaosade ja õhu vahelisest hõõrdest, mis põhjustab ventilatsioonikao;
- masina laagrite hõõrdest, mis põhjustab hõõrdekao.
Harikommutaatoriga alalisvoolumasin
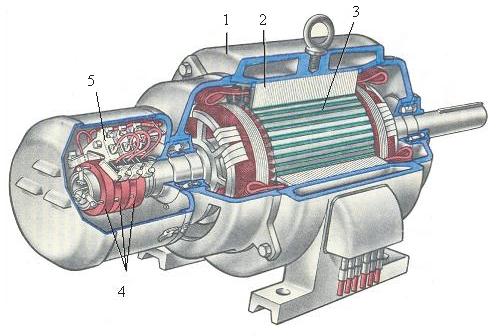
Alalisvoolumasin (joonis 4.4) koosneb paigalseisvast staatorist (stator) ja pöörlevast rootorist (rotor). Alalisvoolumasina pooluste magnetväli tekitatakse ergutusmähise elektrivooluga või püsimagnetite abil. Poolused on kinnitatud masina terasest ikke külge. Viimane on ühtlasi masina kereks ja magnetahela osaks. Üldjuhul nimetatakse elektrimasina osa, milles luuakse magnetväli, induktoriks. Induktori magnetväljas liiguvad vooluga juhtmed. Et saavutada masina pidevat pöörlemist, tuleb juhtme liikumisel ühe pooluse (N, north) alt teise (S, south) alla muuta voolu suunda. Masinaosa, mis koosneb vooluga juhtmetest ja voolu suunda muutvast kommutaatorist (commutator), nimetatakse alalisvoolumasina ankruks (armature). Traditsioonilistes alalisvoolumasinates kasutatakse mehaanilist, moodsates elektrimasinates aga pooljuhtkommutaatorit. Mehaaniline kommutaator koosneb lestadest (lamellidest), mille külge on ühendatud ankrumähise harud, ja lestadel libisevatest harjadest. Harjad ja lestad moodustavad liikuva elektrilise kontaktsõlme, mille kaudu elektrivool juhitakse ankrumähisesse. Tavaliselt on alalisvoolumasina induktor paigalseisev osa ehk staator ja ankur pöörlev osa ehk rootor. On olemas ka pööratud ehitusega masinad, mille magnetvälja tekitav induktor pöörleb ning voolu kommuteeritakse staatoris. Niisugust ehitusviisi kasutatakse püsimagnetergutusega alalisvoolumootorite ja vahelduvvoolu sünkroonmootorite puhul. Rootor (ankur) pöörleb laagritele toetuval võllil. Võlli veotapp (nimetatakse ka võlli A tapiks) ulatub mootori kerest välja ning selle külge ühendatakse liistu abil mootoriga käitatav koormusmasin. Masina jahutamiseks kasutatakse sageli võlliga veetavat ja masinasse sisseehitatud ventilaatorit.
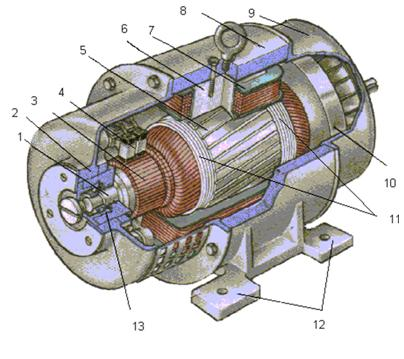
(1- võll; 2- laagrikilp; 3- kommutaator; 4- harjasõlm; 5- ankur; 6- peapoolus; 7- ergutuspool; 8- kere; 9-laagrikilp; 10- ventilaator; 11- kiintused; 12- jalad; 13- laager)
Allikas: ?????????? ?????? ??????????? ????, http://el-mashin.narod.ru
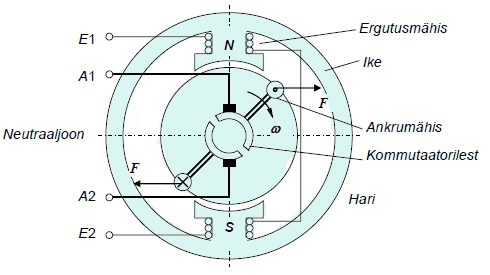
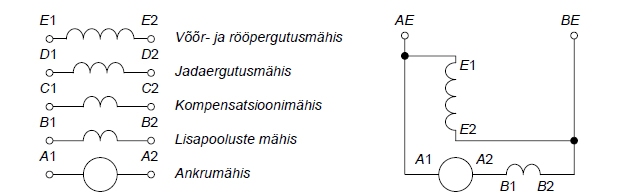
Alalisvoolumasina lihtsustatud tööpõhimõtet iseloomustab joonis 4.5 Masina magnetväli tekitatakse ergutusmähisega, mille klemmid on E1 ja E2. Ankrumähise klemmid on A1 ja A2. Vool juhitakse ankrumähisesse harjadega, mis libisevad ankrumähisega ühendatud kommutaatori lestadel (lamellidel). Ankru pöörlemisel liiguvad harjad ühelt lestalt teisele muutes sellega masina neutraalteljel voolu suunda ankrumähises. Ankrumähisele mõjuv jõud tekitab ankru pöördemomendi, mis on maksimaalne juhul kui mähis paikneb pooluste teljel ja võrdne nulliga kui mähis on masina neutraaljoonel (antud juhul masina poolustega risti oleval teljel. Tähelepanu tuleb pöörata erinevatele ergutusmähise tüüpidele. Ergutusmähise magneetimisergutus (magnetvälja tugevus) on ühelt poolt määratud mähise voolu ja keerdude arvu korrutisega, teiselt poolt aga masina magnetahela omadustega (küllastumisega). Seega võib ühe ja sama magneetimisergutuse tekitada suure voolu ja väikese keerdude arvuga mähisega või vastupidi suure keerdude arvu ja väikese vooluga mähisega. Ankrumähisega rööbiti lülitatud või eraldi allikast toidetava ergutusmähise puhul on mähise vool väike ja keerdude arv suur. Ankrumähisega jadamisi lülitatud ergutusmähise vool on suur (Ie = Ia) ning keerdude arv väike. Magneetimisergutuse suurendamine üle masina küllastusläve magnetvoogu oluliselt ei suurenda ning järelikult ei oma ka mõtet.
Alalisvoolumasina mähiste klemmide tähised ja elektriskeemi näide on esitatud joonisel 4.6
Alalisvoolumootori sildiandmed. Iga elektrimasina kere välisküljele on kinnitatud masina nimiandmetega nimesilt. Põhilised sildile kantavad nimiandmed on järgmised:
- Tootja nimi;
- Tüübi tähis, sarjanumber;
- Nimivõimsus Pn;
- Nimipinge Un;
- Nimivool In;
- Nimikiirus nn;
- Nimiergutusvool Ien;
- Väljalaskeaasta, kere kaitseaste IP, mähiste isolatsiooniklass, talitlusviis jms.
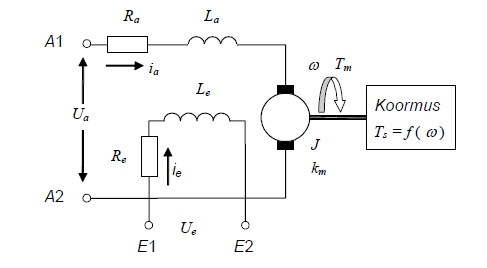
Põhjalikumad andmed alalisvoolumasina kohta esitatakse tootekataloogides.Alalisvoolumasina omaduste uurimisel ja tema tunnussuuruste arvutamisel kasutakse joonisel 4.7 esitatud aseskeem.
Kui mootori võlliga on püsivalt ühendatud koormusmasin, siis mõjutab see ka otseselt mootori tööd (koormusmoment sõltub masina pöörlemiskiirusest).
Alalisvoolumasina püsikiirustalitluse ? = const puhul ning tingimusel, et ergutusvoog on samuti konstantne, kirjeldavad masina tööd järgmised võrrandid:
Ua = iaRa + E
E = ke??
Tm = km?ia
Tm = Tk
kus Ua ? ankrupinge, ia ? ankruvool, Ra ? ankruahela takistus, E ? masina pöörlemisel genereeritud vastuelektromotoorjõud, ? ? pöörlemiskiirus, ?- ergutusmähise või püsimagnetite poolt tekitatud magnetvoog, Tk= f(?)on koormuse tunnusjoon.
Masina elektromotoorjõudu iseloomustav suurus - elektriline konstant ke sõltub masina ehitusest ja arvutatakse valemiga ke = pNa/2?a,
kus p - pooluspaaride arv, Na - ankrumähise keerdude arv, a - ankrumähise harude arv.
Lihtsustatud arvutustes võib masina mehaanilise konstandi kmlugeda võrdseks tema elektrilise konstandiga:
km = ke.
Muutuva kiiruse ja voolu korral ankruvool sõltub nii pingest kui ka vastuelektromotoorjõust, viimane omakorda aga pöörlemiskiirusest. Vool määrab mootori poolt arendatava pöördemomendi, millest sõltub võlli liikumise iseloom ja pöörlemiskiirus.
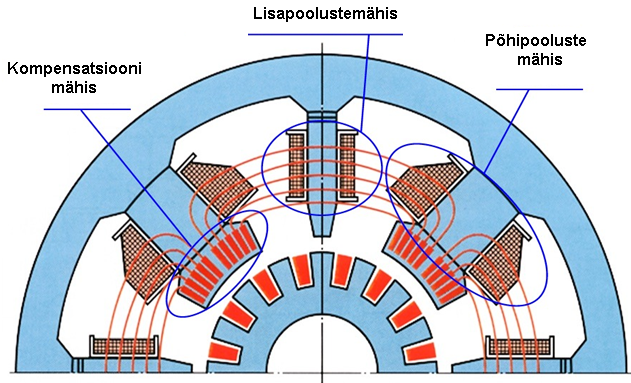
Koormus avaldab masina talitlusele mõju ka ankrureaktsiooni näol, mis tähendab, et koormusvooluga ankrumähise magnetvoog toimib ergutusmähise magnetvoole vastu ning püüab masinat lahti magneetida. Ankrureaktsiooni kompenseerimiseks kasutatakse masinas põhipooluste vahel olevaid lisapooluseid, mille arv võrdub tavaliselt põhipooluste arvuga (joonis 4.8).
Lisapooluste magnetmotoorjõud (mmj) ehk magneetimisergutus valitakse 1,2…1,4 korda suurem ankrumähise magnetvoost ning sellele vastavalt leitakse ka lisapooluste keerdude arv. Kuna lisapoolused on jadamisi ankrumähisega, valmistatakse need sama ristlõikega mähisetraadist kui ankrumähis. Väiksema võimsusega (alla 2,5 kW) mootorite puhul kasutatakse kaks korda väiksemat lisapooluste arvu. Väga väikeste mootorite puhul (alla 300 W) lisapooluseid ei kasutata. Kui lisapooluste arv on 2 korda väiksem, suurendatakse kasutusel olevatel lisapooluste mähiste keerdude arvu nii, et lisapooluste mmj oleks 1,4…1,6 korda suurem kui ankrumähise mmj.
Peale lisapoolusmähiste kasutatakse peapooluse kohal ankrureaktsiooni neutraliseerimiseks ja välja ühtlustamiseks veel kompensatsioonimähist. Tänu keerukatele kompensatsiooni-meetmetele saavutatakse alalisvoolumootoris ankrureaktsiooni peaaegu täielik kompenseerimine ning masina tunnusjooned on sirged ning kirjeldatavad lineaarsete võrranditega. Rakendatud meetmed muudavad aga alalisvoolumasina konstruktsiooni kalliks. Lisaks vähendavad ankruahelasse jadamisi lülitatud kompensatsiooni ja lisapooluste mähised oma kadude tõttu ka masina kasutegurit.
Allikas: ??????? ???????, http://el-mashin.narod.ru
Kõik nimetatud meetmed on võetud kasutusele harikommutaatoriga alalisvoolumasinas selleks, et masina kiiruse ja koormuse muutumisel säiliks tema optimaalne talitlus ning maksimaalne kasutegur.
Allikas: Direct Current Electric Motor, http:www.youtube.com
Pooljuhtkommutaatoriga elektrimasin
Mootori töötamiseks on vaja staatorimähisega tekitada pöörlev magnetväli, mis haarab endaga kaasa rootoril paiknevad püsimagnetid või vooluga juhtmed ning sunnib rootorit pöörlema koos magnetväljaga.
Pöörleva magnetvälja tekitamine mootoris toitemuunduri ventiilide kommuteerimisega (joonis 4.9). Muunduri lülititel on kokku 8 erinevat lülitusolekut. Neist kahel juhul võrdub väljundpinge nulliga, so. siis kui kõigi faaside lülitid on ühendatud alalispinge sama potentsiaali (+ või ?) siiniga. Ülejäänud kuuel juhul antakse mootori mähistele pinge, mis omakorda tekitab voolu ja magnetvoo. Magnetvoo suuna saab määrata parema käe kruvi reegliga. See tähendab, et kui kruvi liigub voolu suunas, siis tekitatakse juhtme ümber magnetvoog mille suunda näitab parema käe kruvi pea pöörlemissuund. Alljärgnevatel joonistel on näidatud pooljuhtmuunduri ventiilide kommuteerimise järjekord, voolu suunad eri etappidel ning sellest tulenev pöördmagnetvälja tekkimine mootoris. Märkigem, et summaarne magnetvoog haarab juhte, mille voolu suund on sama.
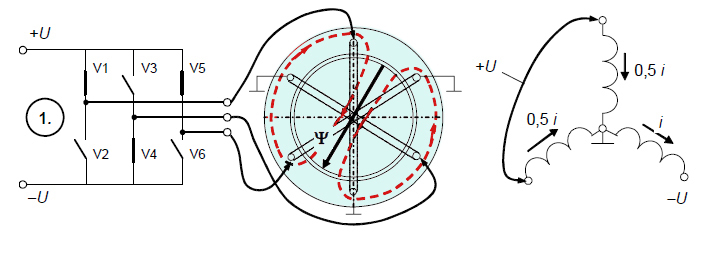
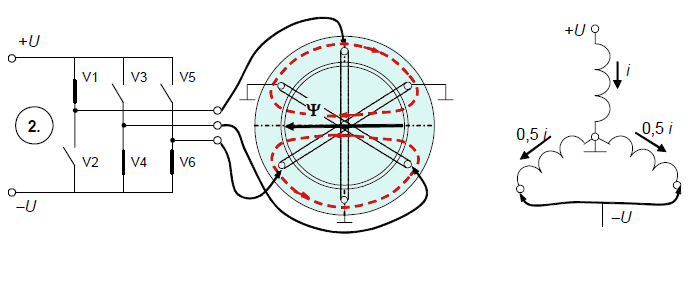
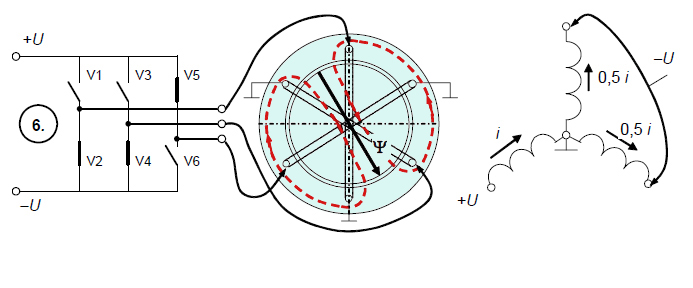
- Etapp. Pooljuhtmuunduri ventiilid V1, V4 ja V5 juhivad voolu staatorimähisesse. Voolu suund ning suhteline suurus faasimähistes on näidatud paremal. Voolud tekitavad summaarse magnetvälja, mille suunavektor on näidatud rasvaselt.
- Etapp. Pooljuhtmuunduri ventiilid V1, V4 ja V6 juhivad voolu staatorimähisesse. Võrreldes eelmise etapiga on magnetvälja vektor pöördunud päripäeva 60 kraadi võrra.
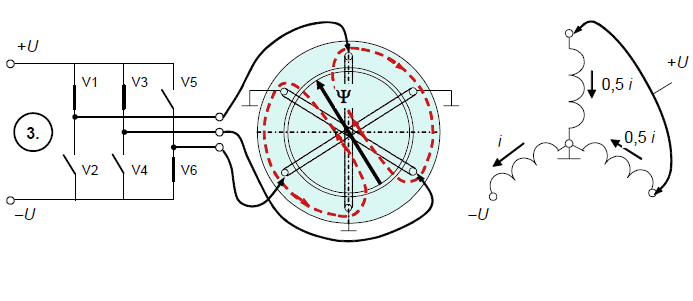
- Etapp. Pooljuhtmuunduri ventiilid V1, V3 ja V6 juhivad voolu staatorimähisesse. Võrreldes eelmise etapiga on magnetvälja vektor pöördunud päripäeva 60 kraadi võrra.
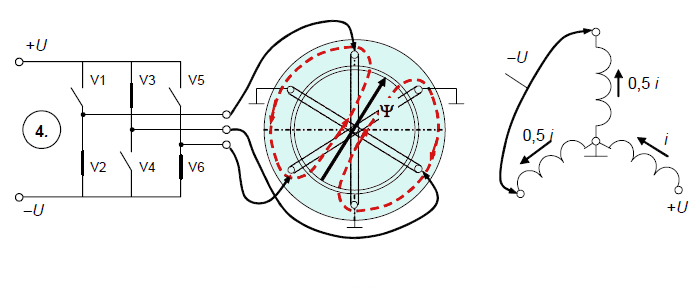
- Etapp. Pooljuhtmuunduri ventiilid V2, V3 ja V6 juhivad voolu staatorimähisesse. Voolu suund ning suhteline suurus faasimähistes on näidatud paremal. Võrreldes eelmise etapiga on magnetvälja vektor pöördunud päripäeva 60 kraadi võrra.
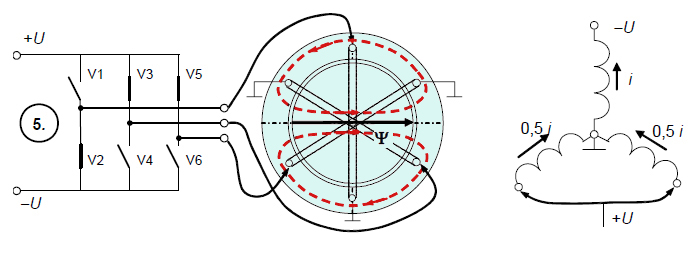
- Etapp. Pooljuhtmuunduri ventiilid V2, V3 ja V5 juhivad voolu staatorimähisesse. Voolu suund ning suhteline suurus faasimähistes on näidatud paremal. Võrreldes eelmise etapiga on magnetvälja vektor pöördunud päripäeva 60 kraadi võrra.
- Etapp. Pooljuhtmuunduri ventiilid V2, V4 ja V5 juhivad voolu staatorimähisesse. Voolu suund ning suhteline suurus faasimähistes on näidatud paremal. Võrreldes eelmise etapiga on magnetvälja vektor pöördunud päripäeva 60 kraadi võrra.
Tulemusena saame ventiilmootori pöörlemise (joonis 4.10) vastavalt ülaltoodud algoritmile
Allikas: ??????????????? ????????????????, http://ru.wikipedia.org
Rootori magnetväli
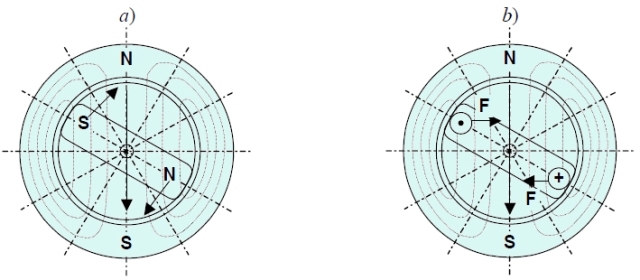
Elektrimasinates kasutatakse rootori magnetvälja tekitamiseks püsimagneteid või vooluga mähist. Püsi- või elektromagnetitega ergutatud rootori magnetvälja poolused tõmbuvad staatori vastasmärgiliste poolustega. Kuna rootor saab staatori suhtes vabalt pöörelda, siis tekitab kahe magnetvälja pooluste tõmbejõud rootori pöördemomendi. Staatori magnetvälja pöörlemisel püüavad rootori poolused magnetvälja poolt tekitatud jõu toimel staatori liikuvatele poolustele järele jõuda. Rootor hakkab pöörlema sünkroonselt staatori magnetväljaga (joonis 4.11, a).
Staatoris tekitatud magnetväljas on vooluga juht, millele toimiv jõud on võrdeline magnetilise induktsiooni, voolu, juhi pikkuse ning voolu ja välja suunavektorite vahelise nurga siinuse korrutisega.
F=B i l sin?.
Jõu suund määratakse vasaku käe reegliga. Rootorimähisele mõjuv jõud tekitab rootori pöördemomendi. Rootor hakkab pöörlema sünkroonselt staatori magnetväljaga (joonis 4.11, b).
Püsimagneteid valmistatakse mitmesugustest sulamitest. Vanemates masinates kasutati alumiiniumi nikli ja koobalti sulamist (AlNiCo) valmistatud püsimagneteid. Viimastel aastatel on loodud väga tõhusad samaarium-koobalt (SmCo) ja neodüüm (NdFeB) püsimagnetid, mille magnetvälja erienergia on mitmeid kordi suurem kui vanematel püsimagnetitel.
Rootoril oleva ergutusmähise korral on probleemiks voolu juhtimine pöörlevasse rootorimähisesse. Selleks kasutatakse kontaktrõngaid. Suurte sünkroonmasinate puhul on rootorimähise ergutuseks kasutusel rootoriga samal võllil olev eraldi ergutusgeneraator.
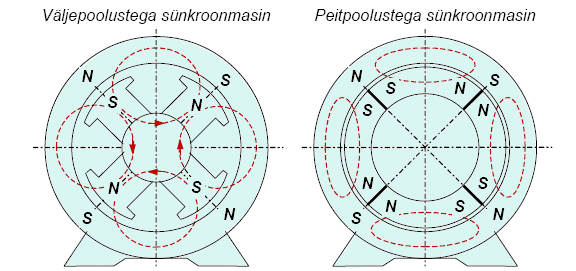
Rootori ehituse järgi liigitatakse masinaid väljepoolustega ja peitepoolustega masinateks. Väljepooluste (salient pole) korral on poolused rootori pinnal selgesti eristatavad ning rootori ja staatori vaheline õhupilu on piki ümbermõõtu suurel määral muutuv. Väljepoolustega rootori iseärasuseks on veel asjaolu, et õhupilu magnetiline takistus (reluctance) on pooluste kohal tunduvalt väiksem kui pooluste vahel. Tänu sellele saab väljepoolustega masinat kasutada ilma ergutusmähiseta, sest staatori magnetväli haarab pöörlemisel rootori väljepoolused endaga kaasa ning "hoiab" rootorit staatori välja suhtes väikseima magnetilise takistusega asendis. Niisugusel põhimõttel töötavaid mootoreid nimetatakse reluktantsmootoriteks. Peitpoolustega (non-salient või consequent pole) rootori puhul on rootori pind sile ning õhupilu kogu ümbermõõdu ulatuses ühtlane.
Pöördmagnetvälja tekitamine võrgupingega
Vahelduvvoolumasinate pöördmagnetväli ehk lihtsalt pöördväli tekitatakse kolmefaasilise staatorimähisega. Kolme faasi mähised on staatorisse paigaldatud üksteise suhtes ruumiliselt nihutatult ning neid toidetakse ajaliselt 1/3 perioodi võrra nihutatud siinuspingetega (vt. joonis 4.13). Mähiste ruumiliselt ja ajaliselt nihutatud voolude süsteem tekitab liikuva (pöörleva) magnetvälja. Pöörlevat magnetvälja saab tekitada ka muude toitepingesüsteemidega, mille faaside arv on kolmest erinev. Väikesevõimsuseliste elektrimasinate puhul on kasutusel nii kahefaasiline süsteem kui ka ühefaasilise toitepinge poolt genereeritud kahe nihutatud magnetvooga süsteem. Võimsate masinate puhul on mõeldav ka suurema faaside arvuga süsteemi kasutamine.
Elektrivõrkudes on üldlevinud kolmefaasiline toitepinge. Sellest tulenevalt on üldlevinud ka kolmefaasilised elektrimasinad. Neid masinaid saab kasutada nii võrgust kui ka pooljuhtmuunduritest toitmisel. Võrgutoitel vahelduvvoolumasinate otsevõrkulülituse puhul tekib suur käivitusvoolu tõuge, mille leevendamiseks rakendatakse sujuvkäiviteid või mitmesuguseid käivituslülitusi.
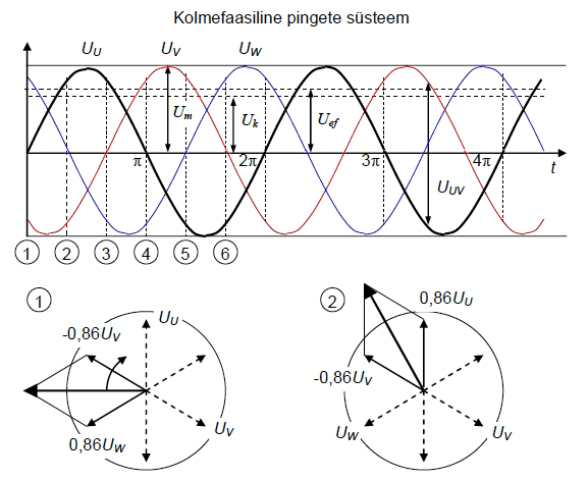
Märkigem, et vahelduvpinge ja -voolu puhul eristatakse amplituud-, efektiiv- ja keskväärtusi. Efektiivväärtus on ühtlasi ruutkeskmine väärtus, mis iseloomustab pinge või voolu töövõimet (võimsust); vrd. P = i2R või
P = U2/R. Siinuspinge kesk- ja efektiivväärtuste seos amplituudväärtusega avaldub valemitega
Uk = 2Umax/? = 0,63Umax
Uef = Umax/?2 = 0,71Umax
Efektiiv- ja keskväärtuse suhet nimetatakse pinge kujuteguriks. Siinuspinge kujutegur on Kf= 1,11.
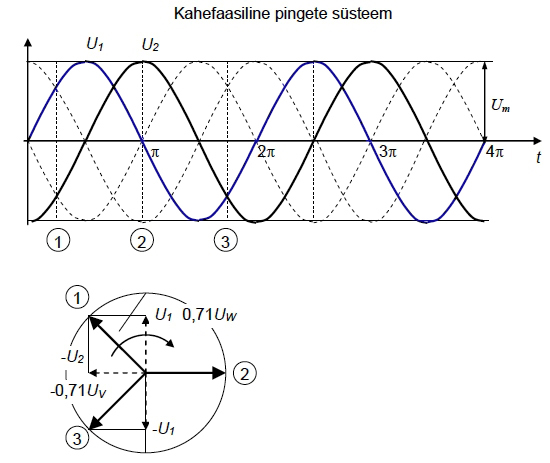
Väikesevõimsuselisi vahelduvvoolumasinaid toidetakse ühefaasilisest võrgust. Pöörleva magnetvälja saab sel juhul tekitada teise ajas nihutatud faasipinge tekitamisega kondensaatori abil. Pöördvälja tekitamine kahefaasilise pingega on näidatud joonisel 4.14
Allikas: Three-phase motor, rotating magnetic field, http://www.openbookproject.net
Kolme faasi mähised on staatorisse paigaldatud üksteise suhtes ruumiliselt nihutatult ning neid toidetakse ajaliselt 1/3 perioodi võrra nihutatud siinuspingetega.
Sünkroonmasin
Sünkroonmootori (samuti ka asünkroonmasina) staatorimähis tekitab pöörleva magnetvälja (joonis 4.13). Erinevalt asünkroonmootorist tekitatakse aga sünkroonmootori rootoris elektromagnet- või püsimagnetergutusega veel teine magnetvoog (ergutusvoog), mis magnetahela kaudu aheldub staatorimähise magnetvooga. Selle tulemusena haarab staatori pöörlev magnetväli rootori endaga kaasa (s.t. staatorivälja N poolused tõmbuvad rootori S poolustega ja vastupidi) ning rootor hakkab pöörlema staatorivälja sünkroonkiirusel. Rootori ergutamiseks elektromagnetite abil tuleb ergutusvool juhtida pöörlevasse rootorisse läbi rootoril asuvate kontaktrõngaste. Püsimagnetite kasutamisel sellist vajadust pole.
Sõltuvalt sünkroonmasina rootori kujust ja pooluste asetusest eristatakse väljepoolustega (salient pole) ja peitpoolustega masinaid. Esimesel juhul on rootori poolused selgesti eristatavad ning õhupilu on minimaalne pooluse kohal. Teisel juhul on rootori pind sile ning õhupilu on ühtlane kogu ulatuses. Väljepoolustega masin töötab ka ilma ergutusväljata, s.t ilma ergutuseks kasutatavate püsi- või elektromagnetiteta. Sel juhul on tegemist nn reaktiivse sünkroonmootoriga ehk reluktantsmootoriga (reluctance motor), mille töö põhineb õhupilu magnetilise takistuse (e. reluktantsi) muutumisel sõltuvalt rootori asendist.
Sünkroonmootor arendab momenti ainult sünkroontalitluses. Seepärast on omaette probleemiks sünkroonmootori käivitamine otsevõrkulülituse puhul, milleks kasutatakse asünkroonkäivitusmähist. Sünkroonmasina kiiruse reguleerimine toimub samuti nagu asünkroonmasina puhul toitepinge sageduse reguleerimisega.
no = 60f1/p, p/min ?0 = 2?f1/p s-1
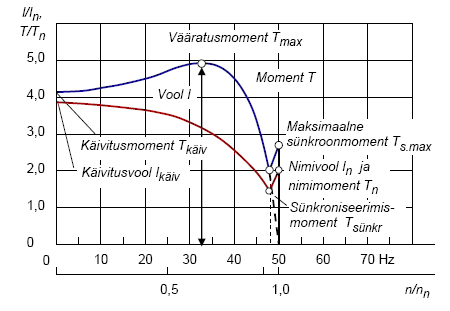
Sünkroonmootori lihtsustatud vektordiagramm ja momendi-nurgatunnusjoon on näidatud joonisel 4.14 Vektordiagrammil näidatud staatorimähise elektromotoorjõu ja võrgupinge vektorite vaheline nurk on ühtlasi masina koormusnurk, millest sõltub masina poolt tekitatav moment. Koormusnurga suurenemisel üle ?/2 hakkab moment vähenema. See nurk on masina stabiilsuspiiriks. Suurel koormusel ei suuda mootor enam tasakaalustada koormusmomenti ning mootor langeb sünkronismist välja. Selleks, et normaaltalitluses oleks mootoril teatav momendivaru valitakse tavaliste sünkroonmootorite puhul nimitalitlusele vastav koormusnurk suhteliselt väike (alla ?/4).
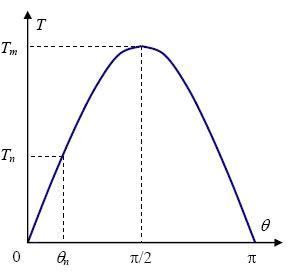
Elektromagnetilise momendi maksimaalväärtuse Tm ja nimiväärtuse Tn suhe iseloomustab masina ülekoormatavust. Tavaliselt ? = Tm/Tn = 2...3.
Suurem koormus põhjustab rootori suurema mahajäämuse staatori magnetväljast. Seda iseloomustab koormusnurk. Masina nimimomendile vastab nimikoormusnurk. Tavaliselt ? = 25...30°.
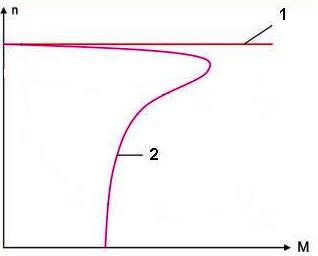
Sünkroommootori mehaaniline tunnusjoon kujutab endast horisontaalset sirgjoont 1 (joonis 4.14). Sünkroonmootori käivitamisel sageduse sujuva suurendamisega tõuseb mehaaniline tunnusjoon koos sagedusega ülespoole ning koos sellega suureneb kiirus ja tõuseb masina tööpunkt. Sageduse vähendamisel aga langeb tunnusjoon allapoole. Sünkroonmootori otsevõrkukäivitamiseks on rootoril olemas asünkroonkäivitusmähis, mille poolt tekitatud momenti iseloomustab kõver 2. Kui käivitamisel kiirus kasvab sünkroonkiiruse lähedale tõmbub masin teatud kiirusel ja momendil sünkrootalitlusse.
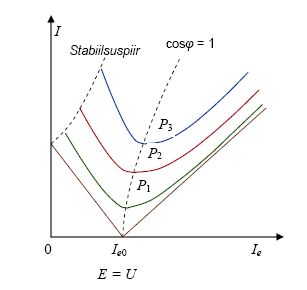
Ergutusmähisega sünkroonmasinat iseloomustavad nn U-kõverad (joonis 4.15) ehk staatorivoolu sõltuvus ergutusvoolust. Kõveratel on olemas miinimumpunkt, milles staatorivool sama võimsuse juures on kõige väiksem. Selles punktis tarbib masin aktiivvõimsust. Ergutusvoolu vähendamisel ehk alaergutamisel tarbib sünkroonmootor võrgust pingest mahajäävat ehk induktiivse iseloomuga voolu, üleergutamisel aga pingest etteruttavat ehk mahtuvusliku iseloomuga voolu. Seega saab ergutusvoolu reguleerimisega muuta võrgust tarbitavat reaktiivenergiat. Spetsiaalselt reaktiivenergia kompenseerimiseks toodetud tühijooksul töötavaid sünkroonmasinaid nimetatakse sünkroonkompensaatoriteks.
Püsimagnetitega sünkroonmootoritel ergutusmähis puudub ning ergutusvoog tekitatakse püsimagnetitega. Püsimagnetitega sünkroonmasina rootori ehitus on lihtne (joonis 4.16), mistõttu niisugune mootor eriti töökindel muutuva kiirusega ajamites. Toitemuundurist toitmisel saab nimikiirusest väiksematel kiirustel mootori koormuse suurenemisel automaatselt suurendada mootori pinget ning mootori töö koormuse muutumisel stabiliseerida. Tänapäeval toodetakse ka väga suure, megavattideni ulatuva võimsusega püsimagnetitega mootoreid. Sünkroonmasinate põhilised kasutusalad on võimsad kompressorid, laeva veo- ja tüürimisajamid, veskid, pumbad, paberimasinad jm.
Väikesevõimsuselisi püsimagnetergutusega masinaid kasutatakse tööpinkide ja robotite ajamites. Kuna tööpinkides täidavad niisugused mootorid sageli abi- ehk teenindusfunktsiooni, siis on hakatud nimetama servomootoriteks ning vastavaid ajameid servoajamiteks. Oma olemuselt on niisugused mootorid samuti sünkroonmootorid, kuid neisse on sisse ehitatud asendiandur, mis võimaldab täpselt määrata rootori asendi staatori suhtes ning vastavalt asendisignaalile juhtida mootori toitepinget. Niisugune juhtimine on võrreldav alalisvoolumootori harikommutaatori talitlusega, mis samuti lülitab ankru toitepinget sõltuvalt ankru asendist (pöördenurgast).
Allikas: ?????????? ????????? ? 3Ds max, http:www/youtube.com
Allikas: Three-phase electric power, http://www.homofaciens.de/
Asünkroonmasin
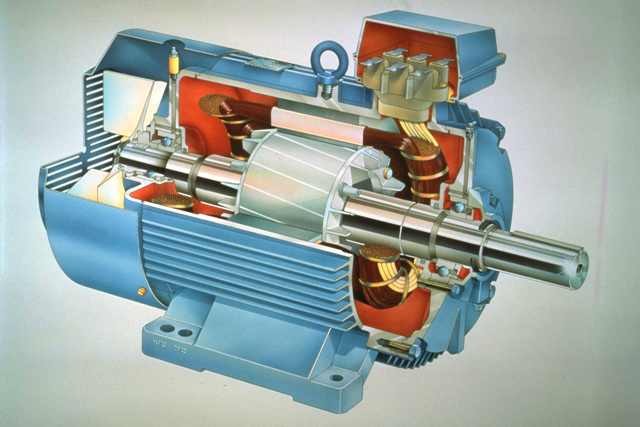
Asünkroonmasina ehitus on näidatud joonistel 4.17. Mootori põhiosadeks on paigalseisev staator ja pöörlev rootor. Staatoril asub pöördväljamähis. Tavaliselt on selleks kolmefaasiline täht- või kolmnurklülituses mähis, mille ühendusjuhid või -klemmid asuvad klemmikarbis. Masinad valmistatakse erineva paigaldusviisi jaoks kas äärik- või käppkinnitusega. Sõltuvalt masina ehitusviisist võib masina võll normaalasendis olla kas horisontaalne või vertikaalne.
Allikas: ?????? ??? ??????????, ??????????? ??????, http://www.model.exponenta.ru/
Masin võib töötada nii mootorina kui ka generaatorina. Asünkroonmootor on maailmas enimkasutatav elektrimootor. Mootori puhul on staatorimähise ülesandeks pöörleva magnetvälja tekitamine. Mootori kiirus sõltub magnetvälja pöörlemise kiirusest ja viimane omakorda staatorimähise pooluste arvust ja toitevoolu sagedusest.
Allikas: ??????????? ?????????, http://www.theft-auto.ru/ispitanie-dvigateley/
Magnetvälja pöörlemiskiirust nimetatakse mootori sünkroonnurkkiiruseks ?0 ehk ka lihtsalt sünkroonkiiruseks n0. Nende vahel kehtib alljärgnev seos:
?0 = 2?f/p=2?n0 /60
?0 ? mootori sünkroonnurkkiirus (rad/s), f? toitevoolu sagedus, p ? mootori pooluste arv ja n0 ? mootori sünkroonkiirus (p/min).
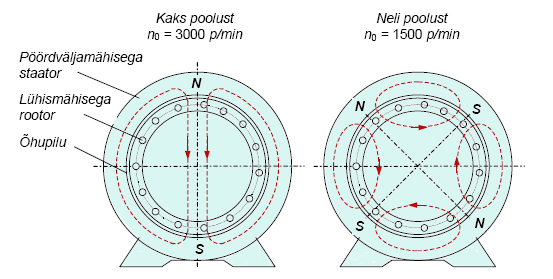
Kahepooluselises ehk ühe pooluspaariga mootoris luuakse joonisel 3, a näidatud magnetväli, mille pöörlemiskiirus toitevõrgu vahelduvvoolu 50 Hz sageduse korral on 3000 p/min ehk 314 rad/s. Neljapooluselises ehk kahe pooluspaariga masina sünkroonkiirus on kaks korda väiksem, s.o. 1500 p/min ehk 157 rad/s. Kuuepooluselise masina sünkroonkiirus on vastavalt 1000 p/min ehk 105 rad/s.
Rootori pöörlemapanemiseks on vaja peale staatorimähiste poolt tekitatud pöörleva magnetvälja tekitada vool rootorimähises. Asünkroonmootori puhul tekitatakse see vool elektromagnetilise induktsiooni põhimõttel. Nimetatud põhimõttest tuleneb ka asünkroonmootori ingliskeelne nimetus - induction motor, s.t. induktsioonmootor. Staatori ja rootori mähised on omavahel magnetahela kaudu elektromagnetilises sidestuses. Elektromagnetilise induktsiooni põhimõtte kohaselt indutseeritakse juhtmes elektromotoorjõud kui juhe magnetväljas liigub või kui juhet ümbritsev magnetväli muutub. Järelikult, elektromotoorjõu ja voolu tekitamiseks rootorimähises, peavad staatori magnetvälja ja rootori pöörlemiskiirused teineteisest erinema. Seda kiiruste erinevust nimetatakse rootori libistuseks (slip) ja tähistatakse tähega s. Libistus arvutatakse sünkroonkiiruse ?0 ja rootori tegeliku pöörlemiskiiruse ? suhtelise vahena.
s= ?0-?/?0 = n0 -n/no
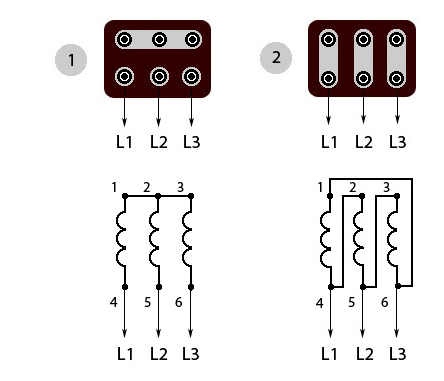
Lühisrootoriga asünkroonmootori skeemitähis, mähiste tähistamine, nimesild on näidatud joonisel 4.21
.jpg)
Allikad: ??????????? ?????????, http://wqww.remont220.ru/asinhronn-dvig.php; http://www.ohio.inetgiant.com
Iga uue masina tüübiga viiakse läbi tüübikatsetused, mille kohta koostatakse katsetuste aruanne. Niisugused aruanded on elektrimasina ostjale saadaval tootja firmast.
Asünkroonmootori animatsioonid
Allikas: http://fweb.wallawalla.edu/class-wiki/upload/thumb/1/15/Squirrel-cage-induction-motor.gif/200px-Squirrel-cage-induction-motor.gif
Allikas: http://www.autoexpert.in.ua/files/technic/electro_car/electromotor/asynchronmotor_animation_4.gif
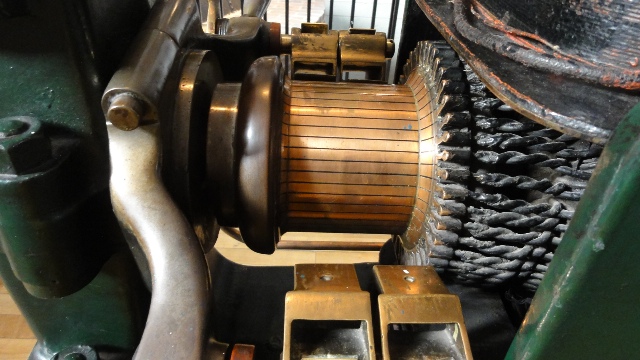
Pildid Londoni Teaduse museumist
 |
 |
 |
| Elektrimasin | Kommutaator | Kontaktrõngad |
Reluktantsmootori (Samm-mootorite)ehitus ja omadused
Reluktantsmootorid on ergutusmähiseta väljepoolustega sünkroonmasinad, mida aktiivse ergutusega sünkroonmasinatele nimetatakse ka reaktiivseteks sünkroonmasinateks. Nad ühendavad endas nii asünkroonmootorite kui ka sünkroonmootorite omadusi. Käivitusprotsessis ja liigkoormuse puhul töötab reluktantsmootor nii nagu asünkroonmootor, püsitalitluses, s. o. pärast käivitust ja juhul kui koormusmoment pole liiga suur T < 1,2 Tn, aga samuti kui sünkroonmootor. Viimasel juhul võrdub mootori libistus nulliga s = 0. Need duaalsed omadused on jälgitavad ka reluktantsmootori kiiruse – momendi tunnusjoontelt (joonis 4.22). Joonisel esitatud kõverat tuleb käsitleda kui reluktantsmootori üldist mehaanilist tunnusjoont, mis konkreetse masina puhul võib esitatust oluliselt erineda.
Allikas: Friction transmission with cylindrical rollers, http://www.youtube.com
Reluktantsmootori staator on ehitatud samuti nagu asünkroonmootori staator,
kuid rootoril on selgelt määratletud asetusega poolused. Rootori radiaalsuunaline
magnetiline takistus (reluktants) muutub suurtes piirides. Magnetväli on
kontsentreeritud pooluste piirkondadesse. Sarnaselt asünkroonmootorile asuvad
uuretes valualumiiniumist lühismähised. Need mähised toimivad ainult
asünkroontalitluse puhul. Sünkroontalitluse korral lühismähistes voolu ei
indutseerita ja masin ei ergutu. Staatorimähis peab arendama rootori
magneetimiseks reaktiivvõimsust. See on rootori õhupilu tõttu väga suur,
sest õhupilu määrab nii masina võimsusteguri kui ka kasuteguri väärtused.
Reluktantsmootoril on rida olulisi puudusi ja kasutuspiiranguid. Esiteks,
suur reaktiivenergia tarve, mis sõltub pooluste arvust ja masina võimsusest.
Otsevõrkulülituses on reluktantsmootori võimsustegur cos ? = 0,4...0,5
ja kasutegur ? = 0,55...0,8. Järelikult tuleb reluktantsmootorit
toitva sagedusmuunduri võimsus valida vähemalt 60 % suurem kui sama väljundvõimsusega
asünkroonmootori puhul. Teiseks, reluktantsmootori lubatav ülekoormusmoment
on ainult 1,2 Tn. Kui tegelik moment on suurem, siis mootor vääratub
sünkroontalitlusest asünkroontalitlusse (vt. joonis 4.22). Mootorit saab viia
tagasi sünkroontalitlusse ainult koormusmomendi vähendamisega alla
sünkroonseerimismomenti Tsünkr (pull-in moment), mille puhul mootor
siirdub asünkroontalitlusest tagasi sünkroontalitlusse.
Samm-mootorid erinevad sünkroonmootoritest vaid selle poolest, et pöörlev magnetväli tekitatakse neis mitte kolmefaasilise siinuspingega, vaid järjestikuliste impulsside jaotamisega masina mähistele. Seetõttu võib impulsside väikese sageduse puhul samm-mootori liikumine olla katkendlik. Samm-mootorid sobivad kasutamiseks väikese võimsusega positsioonjuhtimisega ajamites, mil mootorile antud impulsside arv on võrdeline rootori pöördenurga (ehk asendi) muutusega ning ajami positsioonimiseks pole vaja kasutada täiendavat asendiandurit. Sammu vähendamiseks ja positsioonimistäpsuse suurendamiseks valmistatakse samm-mootorid suure pooluste arvuga. Suurema võimsuse korral pole samm-mootorite kasutamine otstarbekas nende väikese kasuteguri tõttu. Oma tööpõhimõttelt jagunevad samm-mootorid püsimagnetergutusega mootoriteks, väljepoolustega mootoriteks ning nende mõlema kombinatsiooniga hübriidmootoriteks.
Samm-mootori ehitus ja tööpõhimõte
Samm-mootor on elektrimasin, mis muudab alalispinge impulsid mootori võlli mehaaniliseks energiaks. Samm-mootoritel on sõltuvalt ehitusviisist (bipolaarsed või unipolaarsed mootorid) 4, 6 või 8 ühendusklemmi, ehitusviisilt on nad on sünkroonmootorid, mille rootor pöörleb vastavalt staatorimähisesse antud taktimpulssidele ja mille pöördenurk on määratud läbitud sammude arvuga.
Kuna samm-mootor on numbriliselt juhitav, siis sobib ta ideaalselt kokku diskreetsete juhtimissüsteemidega, näiteks mikroprotsessoriga. Igale impulsile vastab teatud pöördenurk α, n impulsile aga pöördenurk γ= n·α . Siit järeldub, et samm-mootorit võib kasutada positsioneerimisel avatud juhtimisahelaga, st tagasisideta süsteemides. Samm-mootori eeliseks on asjaolu, et puudub tagasisideanduri vajadus ajami positsioneerimisel. Positsioneerimistäpsuse suurendamiseks konstrueeritakse mootorid suurema pooluste arvuga. Kuna samm-mootorit juhitakse järjestikuste impulssidega, siis võib madalatel pööretel olla samm-mootori liikumine katkendlik.
Samm-mootorid on rentaablid võimsuseni kuni ~1 kW, neid toodetakse ka lineaarmootorite kujul.
Samm-mootori ühe takti samm ehk sammunurk α
![]()
kus Nph on pooluste arv faasi kohta, m faaside arv ning Z hammaste arv.
Samm-mootor koos taktgeneraatori ja lõppastmega moodustab samm-ajami. Taktsignaalid moodustatakse töö etteandesuuruste (kiirus, asend, kiirendus) alusel ja nendega tüüritakse transistorlülititest koosnevat lõppastet. Transistorlülitite ülesanne on samm-mootori mähiste kommuteerimine ettenähtud liikumistrajektoori tagamiseks.
Samm-mootorite tüübid
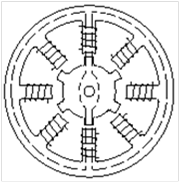
Samm-mootorid jaotatakse vastavalt ehitusviisile reluktants- (reaktiivrootoriga) ja püsimagnet- (aktiivrootoriga) mootoriteks, võimalik on ka kombineeritud konstruktsioon. Reluktants-samm-mootori rootor koosneb monoliitsest hammastega elektrotehnilisest terasest südamikust; staatorivoolu väljalülitamisel kaob ka jääkmagnetism. Seetõttu saab peale mootori pingestamist magnetvoog liikuda takistamatult läbi südamiku. Reluktantsmootori rootor hakkab liikuma väiksema magnetilise takistuse suunas, st väikseima õhupiluni järgmise hamba ja mähise vahel.
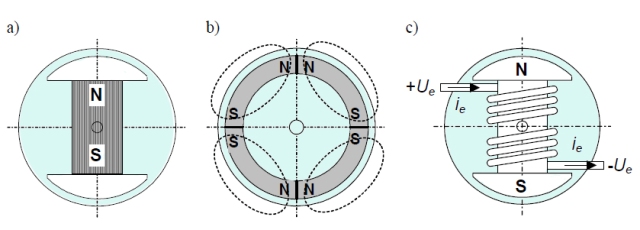
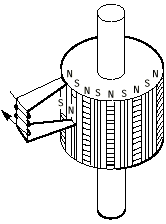
Püsimagnet-samm-mootorite (Joonis 4.23a) staator koosneb elektrotehnilisest terasest ja rootor vahelduvate poolustega püsimagnetitest. Rootor pannakse pöörlema staatoris tekitatava magnetvälja abil.
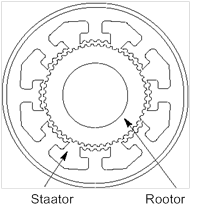
Kuna reluktants-samm-mootoritel (Joonis 4.23b) puuduvad püsimagnetid, ei eksisteeri neil vooluvabas olekus ka takistusmomenti. Püsimagnet-samm-mootorite pooluste arv ja seega ka positsioneerimistäpsus on piiratud. Hübriid-samm-mootoris (Joonis 4.23c) on esindatud mõlema ehitusviisi omadused, tema rootoril on nii püsimagnetid kui hammasvöö.
Suuremomendilisteks mootoriteks nimetatakse samm-mootoreid, mille rootorite valmistamisel on kasutatud eriti tugevaid haruldastest muldmetallidest püsimagneteid. Sellised magnetid tekitavad tavalisest suuremaid väljatihedusi.
|
|
|
| a) aktiivrootoriga | b) reaktiivrootoriga | c) hübriidrootoriga |
Samm-mootorite tööpõhimõte
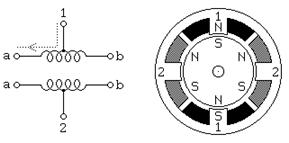
5 või 6 ühendusjuhtmega ja keskväljavõttega unipolaarsed samm-mootorid ühendatakse reeglina (Joonis 4.24a) toodud skeemi järgi. Keskväljavõte ühendatakse tavaliselt toite plussklemmiga ja kummagi mähise otsasid kommuteeritakse soovitud pöörlemissuuna saavutamiseks vaheldumisi toite miinusklemmiga. Näidatud mootori sammunurk on 30°. mähis 1 on jaotatud üla- ja alapooluse ning mähis 2 vasaku ja parema pooluse vahel. Aktiivrootoril on kokku 6 vahelduvat, ümbermõõdule jaotatud poolust. Kommuteerides toite mähiselt 1 ümber mähisele 2, liigub rootor 30° ehk ühe sammu võrra. Pidev liikumine saavutatakse mähiste 1 ja 2 järjestikuste ümberlülitustega.
|

|
| a) unipolaarne | b) bipolaarne |
Bipolaarsete mootorite ehitus (Joonis 4.24b) sarnaneb unipolaarsete mootorite omaga, erinevus seisneb keskväljavõtete puudumises. Seega on mootor lihtsama konstruktsiooniga, kuid lõppastme topoloogia vahelduva polaarsuse tõttu keerukam. Jättes mähised ümber lülitamata, säilitab pingestatud aktiiv- või hübriidrootoriga samm-mootor hoidemomendi, mis väldib rootori iseeneslikku liikumahakkamist väliste jõudude toimel.
Allikas: http://upload.wikimedia.org/wikipedia/commons/archive/6/67/20100925065005!StepperMotor.gif
