
Elektriajamite elektroonika seadmed
Elektriajamite elektroonsed süsteemid
Elektroonsed süsteemid. Elektroonseid süsteeme rakendatakse kõigis tööstusharudes ja samuti ka olmes. Toiteplokid, elektrilised kuumutid, valgustusseadmed, elektrivarustusseadmed ja elektriajamid on tüüpilised jõuelektroonika süsteemide näited. Igal aastal suureneb jõupooljuhtmuunduritest toidetavate elektriajamite arv. See võimaldab juhtida mootorite tööpunkti, st kiirust, pöördemomenti ning seega ka energiatarvet.
Jõupooljuhtmuundur on elektroonse süsteemi osa, mis muundab koormust toitvat elektrienergiat. Sõltuvalt pingest ja võimsusest kasutatakse ühe-või kolmefaasilisi jõupooljuhtmuundureid. Peale selle on veel tähtis vahelduvvoolu (ac) võrgupinge amplituud ja genereeritud alalisvoolu (dc) väärtus. Tähtis tegur on see, et elektrienergiat muundatakse ja juhitakse. Samuti osutub tähtsaks nõue, mille kohaselt muundur peab võrgust energiat tarbima või seda sinna tagastama.
Juhtimiselektroonika tagab muundurite ja elektroonsete süsteemide juhtimise. Edu elektroonika vallas ja materjalide tööstuses määrab olukorra ning suunad maailma elektriajamite tootmise tehnoloogias.
Iga lülitus koosneb elektroonikakomponentidest, milleks on takistid, kondensaatorid, trafod, (drosselid), kered, jne. ja põhilistest elektronseadistest:
- dioodid, sealhulgas Zener-i diood, optoelektroonikaseadised ja Schottky dioodid ning dinistorid (DIAC);
- türistorid, üheoperatsioonilised türistorid (SCR), sümistorid (TRIAC), suletavad türistorid (GTO), ja MOS-juhitavad türistorid (MCT);
- transistorid, nagu bipolaartransistorid (BJT), väljatransistorid (FET) ja isoleeritud paisuga bipolaartransistorid (IGBT).
Tänu pooljuhtseadiste tootmise tehnoloogia täiustumisele laienevad elektroonika rakendused ikka veel, mis võimaldab kõrgemaid pingeid ja voolusi ning paremaid lülitustunnusjooni. Teisest küljest on kaasaegsete muundurite peamisteks eelisteks kõrge kasutegur, väike mass ja väikesed mõõtmed, suur töökiirus ja kõrge erivõimsus, mis saavutatakse lülititalitlusega, kus pooljuhtseadiseid juhitakse ainult sisse/välja lülitamise põhimõttel.
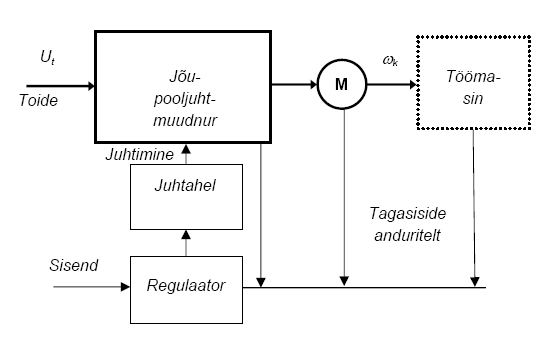
Joonise ülemine osa kujutab elektriajami jõuahelat, kuna alumine osa kujutab juhtimissüsteemi. Vastavalt sisendsignaalile juhivad alalisvoolu ja vahelduvvoolu elektriajamid otstarbekalt töömasina kiirust, momenti ja asendit. Sisendsignaali ja kiiruse, momendi või asendi tegelike väärtuste võrdlemise abil, mis saadakse vastavatelt anduritelt, moodustab regulaator juhtahelale juhtsignaali, mis juhib jõupooljuhtmuundurit. Jõupooljuhtmuundur (joonis 1) saab toide ühe- või kolmefaasilisest siinuspingega kindla sageduse ja amplituudiga pingega toitevõrgust ning muundab need suurused väljundis (sageduse, pinge amplituudi ja faaside arvu) mootori jaoks optimaalselt sobivateks suurusteks.
Üldotstarbelistes seadmetes töötab elektriajam ilma tagasisidedeta avatud juhtimissüsteemiga. See suur grupp lihtsaid elektriajameid leiab kasutamist nii tööstuses kui koduses majapidamises. Erinevaid jõupooljuhtmuundureid kasutatakse ka akutoitega seadmetes, nagu laadurtõstukid, starterid ja automatiseeritud abiajamid. Muundurid võivad toita nii asünkroonmootoreid kui ka sünkroonmootoreid.
Mootori mähiste aktiivtakistus sõltub temperatuurist, induktiivsus rootori asendist ja elektromotoorjõud mootori pöörlemiskiirusest.
Olles muundurile spetsiifiliseks koormuseks, ei tööta mootor tavaliselt püsikiirusel. Tavaliselt on kiirus muutuv, sisaldades järske kiirendusi ja pidurdusi mõlemas pöörlemissuunas ning täiendavalt ületatakse veel muutuvat pöördemomenti. Tavaliselt on elektriajamitel kaks talitlusviisi -mootoritalitlus ja rekuperatsioon (generaatoritalitlus).
Mootori talitlust kasutatakse töömasina käitamiseks ja rekuperatsiooni juhul, kui töömasin käitab mootorit. Sõltuvalt ajami talitlusest võimaldavad erinevad muundurite lülitused samuti sobivaid talitlusi nt alaldamist ja vaheldamist, kasutades erinevaid väljundtunnusjooni. Reeglina on mootorile vajalikud kahe- ja neljakvadrandilised muundurid, mis omavad jõuahelat pidurdusenergia vastuvõtmiseks ja hajutamiseks. Suure jõudlusega rakendustes nagu robotid, elektrilised töövahendid, tööpingid, jt, vajavad elektriajamid suletud automaatjuhtimissüsteeme koos sisseehitatud andurite ja regulaatoritega.
Vahelduv/alalisvoolu muundurid
Alaldamine. Vahelduv/alalisvoolu muundurid ehk alaldid. Need muundavad vahelduvvoolu alalisvooluks paljudes tööstuslikes, põllumajanduslikes, olmelistes ja muudes rakendustes. Praktiliselt piiramatu väljundvõimsuse ja hea juhitavuse tõttu kasutatakse alaldeid kui sõltumatuid seadmeid alalisvoolumootori (või mootorite) toiteks ja vahelduvvooluajamite sisendlülidena. Nende toimekiirus osutub tavaliselt piisavaks elektriajamites tekkivate elektromehaaniliste siirdeprotsesside juhtimiseks. Võrguga sünkroniseeritud vahelduv/alalisvoolu muundureid ehk loomuliku kommutatsiooniga muundureid või passiivseid alaldeid kasutatakse seadmetes, mida toidetakse ühe- või kolmefaasilisest vahelduvvooluvõrgust. See osutub lihtsaks, kuna antud lülitused sisaldavad minimaalse arvu aktiiv- ja passiivkomponente. Türistorid on võrguga sünkroniseeritud jõulülitid (joonis 5.2)

Allikas: http://www.energy-m.ru/products_pictures/categories/silovye_poluprovodnikovye.jpg
Termin "võrguga sünkroniseeritud" tähistab teatud kommutatsiooni liiki, kus voolude üleminek ühest juhtivast elemendist teise toimub võrgupinge (toitepinge) kaasabil. Türistori avamiseks (sisselülitamiseks) on tarvis anda selle tüürelektroodile vooluimpulss.
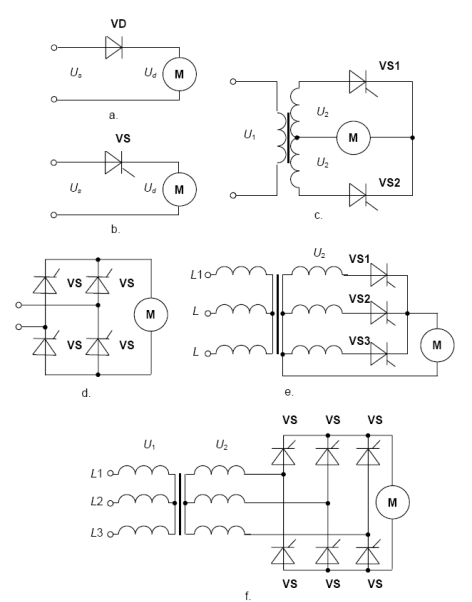
Peamiste alalditüüpide elektriskeemid on näidatud joonisel 2. Dioodide baasil koostatud alaldit nimetatakse mittetüüritavaks alaldiks ja türistoride või transistoride baasil koostatud alaldit tuntakse tüüritava alaldina, kuna selle alalis-väljundpinge on muudetav. Alaldusprotsess võib olla üsna mitmesugune ning seetõttu kasutatakse erinevaid alaldilülitusi:
- • keskväljavõttega (M)- ja sildalaldid (B),
- • ühefaasilised (M1, M2, B2)- ja kolmefaasilised alaldid (M3, B6),
- • poolperiood (1-pulsilised)- ja täisperioodalaldid (2, 3, 6-pulsilised).
Ühefaasilised alaldid. Võimsustel vähem kui mõni kilovatt nt elamute rakendustes varustatakse mootorid ühefaasiliste toiteallikatega. Põhiliselt kasutatakse seal ühefaasilisi poolperioodalaldeid (M1), mis on toodud joonisel 5.3, a, b.
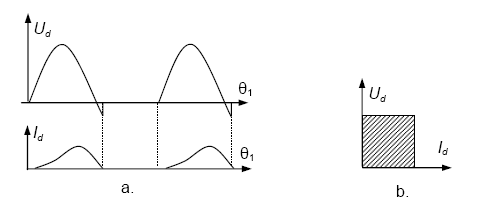
Poolperiooddioodalaldi resulteerivad väljundpinge ja voolu kujud on näidatud joonisel 3 a. Sealt,
Θ1 = ω1·t,
ω1 = 2π·f1 ,
kus ω1 on nurksagedus, f1 võrgupinge sagedus ja t aeg. Siinuspinge positiivse poolperioodi vältel dioodi VD anoodi potentsiaal on positiivne ja katoodi potentsiaal on negatiivne ning diood juhib voolu. Sel ajal läbib alalisvoolu positiivne poolperiood koormuseks olevat mootorit M. Siinuspinge negatiivse poolperioodi vältel muutub anoodi potentsiaal negatiivseks ja katoodi potentsiaal positiivseks. Nüüd on diood suletud, vool praktiliselt koormust ei läbi ning seetõttu puudub ka koormusel pinge. Sellist tüüpi muundurit nimetatakse poolperioodalaldiks - negatiivne poolperiood on nagu “ära lõigatud.” Kuni koormuspinge poolperiood on positiivne, läbib koormust katkev alalisvool, st vool läbib koormust vaid ühes suunas ning omab katkestusi. Seetõttu saab alaldi töötada ainult pinge-voolutasandi esimeses kvadrandis, nagu näitab joonis 5.4, b, mistõttu nimetatakse seda ühekvadrandiliseks muunduriks.
kus ω1 on nurksagedus, f1 võrgupinge sagedus ja t aeg. Siinuspinge positiivse poolperioodi vältel dioodi VD anoodi potentsiaal on positiivne ja katoodi potentsiaal on negatiivne ning diood juhib voolu. Sel ajal läbib alalisvoolu positiivne poolperiood koormuseks olevat mootorit M. Siinuspinge negatiivse poolperioodi vältel muutub anoodi potentsiaal negatiivseks ja katoodi potentsiaal positiivseks. Nüüd on diood suletud, vool praktiliselt koormust ei läbi ning seetõttu puudub ka koormusel pinge. Sellist tüüpi muundurit nimetatakse poolperioodalaldiks - negatiivne poolperiood on nagu “ära lõigatud.” Kuni koormuspinge poolperiood on positiivne, läbib koormust katkev alalisvool, st vool läbib koormust vaid ühes suunas ning omab katkestusi. Seetõttu saab alaldi töötada ainult pinge-voolutasandi esimeses kvadrandis, nagu näitab joonis 3, b, mistõttu nimetatakse seda ühekvadrandiliseks muunduriks.
Kahe türistoriga ühefaasiline täisperioodalaldi (keskväljavõttega alaldi või M2) elektriline skeem on näidatud joonisel 5.2, c. Selline alaldi annab väljundis iga siinuspinge poolperioodi korral pulseeriva pinge ja voolu, nagu on näidatud joonisel 5.5.
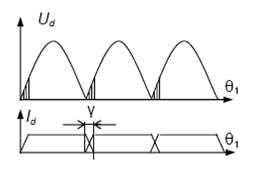
Induktiivkoormus põhjustab voolu “ülekatte”, mida nimetatakse kommutatsiooninurgaks γ. Vahelduvpinge ülekandmiseks dioodlülitusele vajab antud alaldi keskväljavõttega trafot. Mõlema türistori VS1 ja VS2 anoodid on ühendatud trafo sekundaarmähise alguse ja lõpuga ning katoodid on ühendatud kokku positiivsel ühisväljundil. Koormusmootor M ühendatakse katoodide ühispunktiga ja trafo sekundaarmähise keskväljavõttega. Trafo, kaks dioodi või türistori ja koormus moodustavad tervikliku voolukontuuri.
Türistoride juhtimisel tüürnurga α muutmisega vahemikus 0...π on võimalik muuta mootori pöörlemissuunda, kuid koormusvool ja pöördemoment jäävad ühesuunaliseks, nagu näitab joonis 5.6
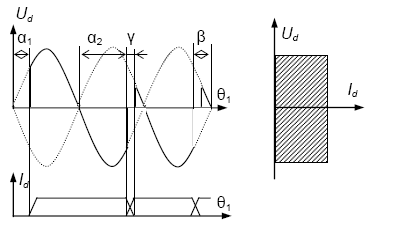
Seega võib alaldi töötada pinge-voolutasandi kahes kvadrandis, kusjuures esimeses kvadrandis on tegemist alalditalitlusega ning neljandas vahelditalitlusega. Seetõttu on antud alaldi kahekvadrandiline muundur. Kuna muunduri väljundvool ei saa muutuda negatiivseks, on ajami juhtsignaalide ja pidurdusviiside kasutamine piiratud. Vahelditalitluse korral kasutatakse tüürnurga mõiste asemel sageli eelnemisnurga mõistet, mis täiendab α väärtust 180o-ni. Seda nurka tähistatakse tavaliselt tähega β (joonis 5). Sel juhul:
α + β = π
cos α = - cos φ
Nelja dioodi või türistoriga täisperioodalaldit, mis on toodud joonisel 2, d, nimetatakse ühefaasiliseks sildalaldiks (B2). Kuna selle alaldi skeemis kasutatakse rohkem pooljuhtseadiseid, siis puudub vajadus keskväljavõttega trafo järele. Töötsükli vältel on sildalaldi kaks dioodi siinuspinge iga poolperioodi kestel päripingestatud. Siinuspinge positiivne poolperioodi kestel on dioodid VS2 ja VS3 päripingestatud ning dioodid VS1 ja VS4 vastupingestatud. Vool suundub vahelduvpingeallikast läbi dioodi VS2, läbi koormuse ja siis läbi dioodi VS3 tagasi toiteallikasse ning seetõttu läbib mootorit ühesuunaline koormusvool.
Negatiivse poolperioodi vältel liigub vool vahelduvpingeallikast läbi dioodi VS1, läbi koormuse ning seejärel läbi dioodi VS4 tagasi toiteallikasse. Järelikult läbib mootorit samasuunaline vool kui eelmise poolperioodi vältel, mistõttu on ka pinge koormusel mõlema poolperioodi kestel ühesuunaline. Selle tulemusena läbib mõlema poolperioodi kestel koormust pulseeriv alalispinge. Pingete ja voolude ajadiagrammid ja pinge-voolu tasand on käesoleval alaldil samasugused kui täisperioodalaldil.
Kolmefaasilised alaldid. Kolmefaasiline kolme dioodiga alaldi (keskväljavõttega alaldi, M3) annab väiksema pulsatsiooniga väljundpinget kui ühefaasiline ning tarbib seejuures vähem elektrienergiat. Sellist alaldit on otstarbekas kasutada kolmefaasilise toitevõrgu korral võimsuseni kuni üks kilovatt. Joonisel 2, e, on toitevõrgu faasid L1, L2, ja L3 ühendatud läbi trafo türistoride VS1, VS2, ja VS3 anoodidega. Mootor M ühendatakse türistoride katoodide ühispunktiga ja trafo tähtühenduses sekundaarmähise neutraalpunktiga. Kui faasis L1 on pinge maksimaalne ja negatiivne, läbib vool türistori VS1, kuni see vastupingestub. Faasi L1 negatiivse poolperioodi vältel on türistor VS1 suletud (ei juhi voolu). Ülejäänud türistorid talitlevad sarnaselt - juhivad voolu siinuspinge positiivse poolperioodi vältel ning ei juhi negatiivse poolperioodi vältel. Kolmefaasiline kolme dioodiga alaldi pingete diagrammid on näidatud joonisel 5.7
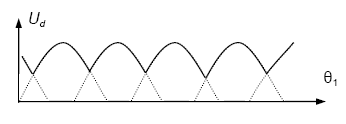
Aktiivinduktiivkoormuse puhul juhib diood või türistor voolu ka pärast seda, kui pinge on muutnud märki. Eelmainitud põhjusel ei sulgu türistor nullpingel hetkeliselt, vaid jääb avatuks. Türistori tüürnurga reguleerimisega on võimalik muuta pinge negatiivseks ja niimoodi saadakse jällegi kahekvadrandiline muundur.
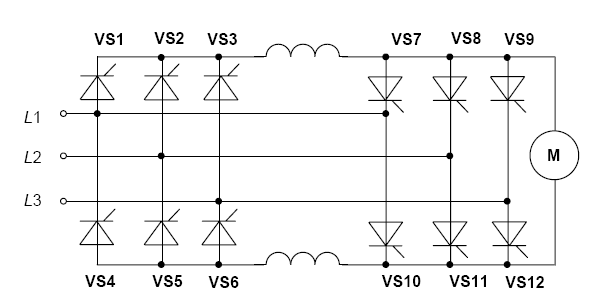
Tavaliselt kasutatava kuuepulsilise, eelneva alaldi analoogi elektriline skeem on näidatud joonisel 1.2, f. Selles kolmefaasilises sildalaldis (B6) kasutatakse kuut dioodi või türistori.
Türistoride VS4, VS5 ja VS6 anoodid on ühendatud kokku ühispunkti, katoodid VS1, VS2 ja VS3 aga teise punkti. Koormus ühendatakse nende punktide vahele. Järelikult kaks türistori juhivad voolu positiivse pinge korral, kusjuures teised kaks on vastupingestatud. Sama toimub ka negatiivse pinge korral - kaks türistori juhivad negatiivse pinge korral ning teised kaks grupist on vastupingestatud. Vähemalt kaks türistori on samaaegselt avatud olekus ning vähemalt üks igast grupist peab juhtima, et kergendada voolu läbimist mootorist. Selle alaldi pinge pulsatsioon on madal, kuna väljundpinge koosneb kuuest pulsist siinuspinge perioodi kohta (joonis 5.8). Türistoride lülitusjärjekord joonisel 2, f, on: VS1, VS6, VS2, VS4, VS3, VS5.
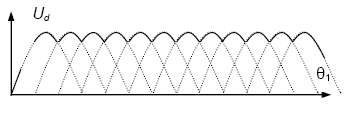
Lülitus ei vaja kolmefaasilise toiteallika neutraalpunkti, järelikult võib kasutada nii kolmnurk-kui tähtlülituses toiteallikaid. Antud alaldi on samuti kahekvadrandiline.
Juhul kui koormuse induktiivsus on suur, jätkub pärivool negatiivse pinge korral ning seetõttu tekib pooljuhtseadiste sulgumisel ajaline viide. Kuni varem avatud pooljuhtseadised pole sulgunud, osutub pärast järgmiste avanemist vajalikuks, et kolm või isegi rohkem seadist oleksid avatud kommutatsiooniprotsessi vältel. See tähendab, et rohkem kui üks diood anood või katoodgrupist on avatud ja vool lülitub ümber ühest faasist teise.
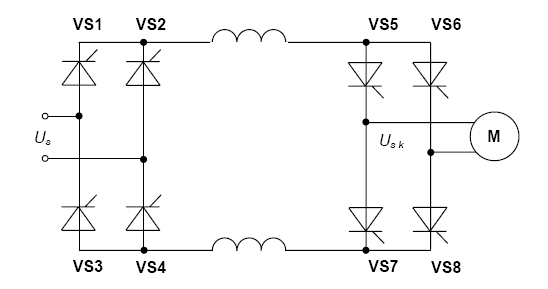
Reverseeritavad alaldid. Eelnevate lülituste puhul oli muudetav koormuspinge suund, kuid mitte koormusvoolu suund. Joonisel 5.9, a, on näidatud kahe keskväljavõttega alaldi vastulülitus, mis võimaldab muuta koormusvoolu polaarsust (kahepolaarne alaldisüsteem).
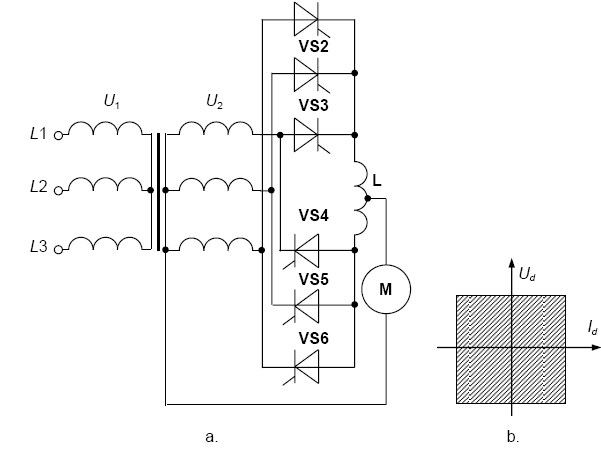
See on neljakvadrandiline reversseeritav alaldi, kuna türistoride tüürnurga muutmise abil võimaldab lülitus saada nii negatiivset voolu kui negatiivset pinget (joonis 8, b). Kui türistorid VS1, VS2 ja VS3 juhivad voolu, siis talitleb alaldi esimeses ja neljandas kvadrandis, kui aga voolu juhivad türistorid VS4, VS5 ja VS6, talitleb alaldi teises ja kolmandas kvadrandis. Samuti kasutatakse neljakvadrandilise talitluse saamiseks kahte vasturööpselt lülitatud sildalaldit, nagu on näidatud joonisel 5.10.
Sellist lülitust kasutatakse tavaliselt tööstuslikes neljakvadrandilistes alalisvoolusüsteemides ning rakendustes, milles nõutakse kiiretoimelist juhtimist. Tänapäeval toodetakse vasturööpselt lülitatud türistor-sildalalditega reverseeritavaid lülitusi komplektseadmetena väga laias võimsuste vahemikus alates mõnest kilovatist kuni kümnete megavattideni. Suurte võimsuste korral kasutatakse seadmete ehitamisel moodulpõhimõtet ning vajalikuks osutuvad õhk-või vesijahutusradiaatorid.
Kolmefaasilised aktiivalaldid. Kolmefaasilise Vienna silla elektriline skeem on toodud joonisel 10, mida võib iseloomustada järgmiselt.
Silla toitevõrgu poolel paikneb igas faasis drossel ja väljund kujutab endast keskväljavõttega muudetava alalispingega ahelat. Skeemi eeliseks on lülitite madalama blokeerpinge vajadus tänu väljundpinge jaotamisele ning paremad juhtivustunnusjooned.
Igas faasis on üks juhitav lüliti nt MOSFET-transistor. Ümbritsetuna nelja dioodiga sildadest, töötavad need kahesuunaliste lülititena. Läbi kahe dioodi ja drosseli ühendab suletud lüliti toitepinge faasi alalisvoolu keskväljavõttega, tekitades magneetimise. Avatud lüliti korral demagnetiseerub drossel alalisvoolu koormusesse läbi vabavoolu dioodide, ühendades vastavalt koormuse positiivse või negatiivse klemmi.
Alalis/vahelduvvoolu muundurid
Alalis/vahelduvvoolumuundureid ehk vaheldid on mõeldud alalistoitepinge muundamiseks ettenähtud suuruse ja sagedusega vahelduvpingeks. Vaheldites kasutatakse juhitavaid pooljuhtseadiseid nt lihttüristore, GTO-türistore ja transistore. Alalissisendpingeks võib olla näiteks alaldatud võrgupinge. Samuti võib alalispinget anda sõltumatu pingeallikas nagu kütuseelement või galvaanielement. Antud süsteemis toidetakse vaheldit vahetult võrgupingega Ud. Tüüpilised võrgupinged elektriveokites on 12, 24, 48, või 80 V, mis võimaldavad vaheldites lülititena eelistatult kasutada MOSFET-ja IGBT-transistore. Alalispinge toiteallikas on võimeline varustama elektrienergiaga ajami mootorit ning tagastama seda võrku pidurdustalitluse (generaatoritalitluse) puhul.
Vaheldeid toodetakse nii ühe-kui kolmefaasilise väljundiga, kuid enamikes tööstuslikes rakendustes on nõutav kolmefaasiline vahelduvvoolu-väljund. Madalapingelised poolperioodvaheldid juhivad elektrienergiat vaid ühe poolperioodi vältel. Selliseid vaheldeid kasutatakse koormuse võimsuste vahemikus 100…200 W.
Vaheldeid võib liigitada sõltumatuteks ja võrguga sünkroniseeritud vahelditeks:
- juhul kui vaheldi on ainult vahelduvvoolukoormuse toiteallikas, nimetatakse seda sõltumatuks vaheldiks;
- kui aga vaheldi kujutab endast toitevõrgu põhiosa, siis on tegemist võrguga sünkroniseeritud vaheldiga.
Lülituse tüübi järgi vaheldid liigitatakse pinge-ja vooluvahelditeks.
Pingevaheldi (VSI-voltage source inverter) formeerib pinge lähtuvalt nõutud parameetritest st suurusest, sagedusest ja faasinihkenurgast. Tavaliselt ühendatakse pingevaheldis toiteallikaga rööpselt suure mahtuvusega kondensaator, mis hoiab sisendpinge konstantse. Pingevaheldi lülitid koostatakse täielikult juhitavatest pooljuhtseadistest (transistorid, GTO-türistorid või MCT-türistorid).
Juhul kui nõutakse kahesuunalist voolu, ühendatakse lülititega rööpselt vabavoolu dioodid ehk tagasitoite dioodid.Vooluvaheldi (CSI-current source inverter) on vastavalt nõutavate parameetritega (voolu suurus, sagedus ja faasinihkenurk) vooluallikas. Reeglina ühendatakse vooluvaheldis toiteallikaga jadamisi drossel, mis hoiab sisendvoolu konstantse. Vooluvaheldi pooljuhtlülitid muudavad perioodiliselt väljundvoolu suunda ning koormuse näivtakistus on väga väike. Seega vastab vooluvaheldi väljundpinge kuju koormusvoolu poolt põhjustatud pingelangu kujule.
Sildlülituses pingevaheldi. Ühefaasilise keskväljavõttega poolsild-pingevaheldi elektriline skeem on näidatud joonisel 5.12. Lülitite VT1 ja VT2 ülesannet täidavad siin harilikult bipolaartransistorid, MOSFET-transistorid, IGBT-transistorid, GTO-türistorid või lihttüristorid koos sundkommutatsiooni ahelaga. Lülitid VT1 ja VT2 toidavad mootorit M ühissisendiga alalispingeallikast.
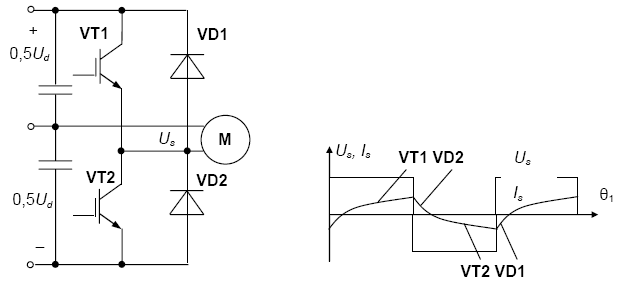
Väljundpinge positiivse poolperioodi vältel on lüliti VT1 suletud ning pinge väljundis Us = +0,5Ud. Väljundpinge negatiivse poolperioodi vältel on lüliti VT2 suletud ning pinge väljundis Us = +0,5Ud. Enne kui üks lüliti sulgub, siis teine avaneb, kuid sellegipoolest on mõlemad lülitid hetkeliselt suletud ning lühistavad alalisvoolu toiteahela.
Voolu teekond reaktiivkoormuse korral vabavoolu dioodid VD1 ja VD2 tagastavad mootori M reaktiivenergia toitevõrku. Kuna Us on positiivne ajavahemiku 0 < t < 0,5T kestel, juhib voolu transistor VT1 või diood VD1. Alates hetkest, kui Is muutub negatiivseks juhib poolperioodi alguses voolu diood VD1. Seega juhivad vabavoolu dioodid voolu siis, kui vool ja pinge on vastassuunalised.
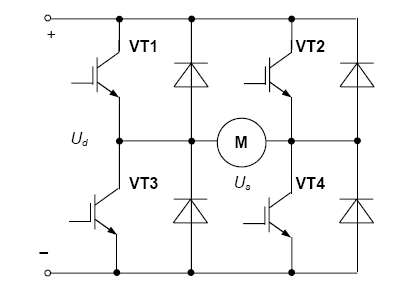
Joonisel 2 on toodud ühefaasilise täissild-pingevaheldi jõuahela skeem. Skeemi mõlemad õlad sisaldavad transistoride paari koos vasturööplülituses vabavoolu dioodidest koosneva vastuvoolu tühjendusahelaga. Vabavoolu dioodid moodustavad haru, mis juhib induktiivvoolu avatud lülitite puhul. Jällegi tagastavad dioodid alalisvoolu toitevõrku seni, kuni lülitid lülitavad reaktiivpinget.
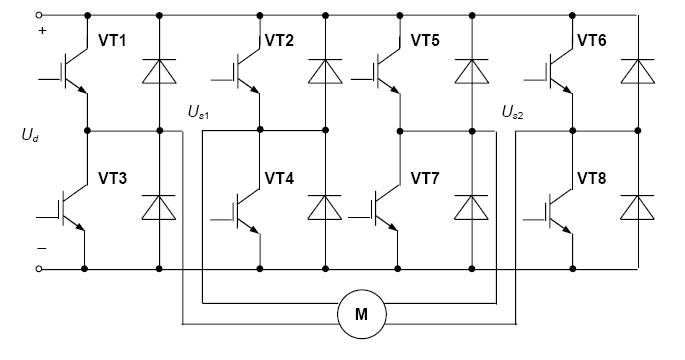
Joonis 5.14 kujutab muundurit, mis on ette nähtud kahe mähisega mootori M sagedusjuhtimiseks. Lülitus koosneb kahest ühefaasilisest täissild-pingevaheldist, kus esimene sild toidab mootori juhtimismähist ning teine ergutusmähist.
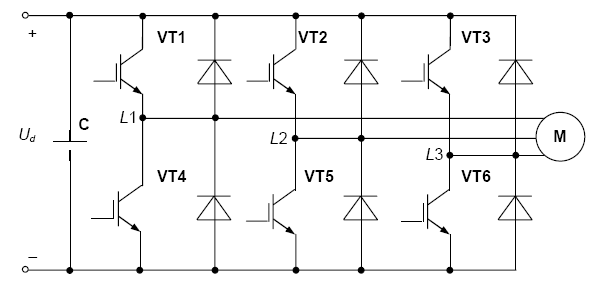
Kõige sagedamini kasutatava kolmefaasilise sildlülituses pingevaheldi jõuahela skeem on näidatud joonisel 5.15. Vaheldi koosneb kolmest õlast (üks igas faasis). Lülituse kõik õlad on võrdsed, st iga õla väljundpinge sõltub ainult alalis-toitepingest ja lülitite seisundist. Väljundpinge ei sõltu koormusvoolu suurusest, võimalikud on erinevaid transistoride avamis-ja sulgemiskombinatsioone.
Kõrgepingeline talitluse korral vaheldite pooljuhtlülitite lubatud maksimaalse pinge piirab oluliselt muundurite maksimaalset väljundpinget või sunnib kasutama kallimaid pooljuhtlüliteid soovitud pinge muundamiseks. Sel juhul kolme ühefaasilise trafode kasutamisega puudub ning lülitatav pinge piisavalt madal.
Vooluvaheldi. Türistoritel põhineva sundkommutatsiooniga vooluvaheldi jõuahela skeem on näidatud joonisel 5.16, kus täidab ühefaasiline sild kommutaatori rolli.
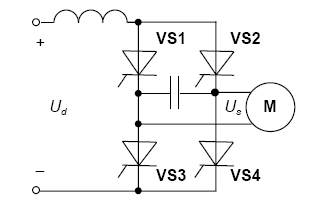
Vooluallika talitluse saavutamiseks on vaheldi sisendisse lülitatud drossel. Väljundis olev kondensaator on nagu energeetiline puhver pulseeriva vooluga vaheldi ja koormuse vahel, ning teostab türistoride sundkommutatsiooni. Kui türistorid VS2 ja VS3 on avatud, siis laetakse kondensaatorit sisendpingega. Niipea kui türistorid VS1 ja VS4 avanevad, saavad türisorid VS2 ja VS3 kondensaatorilt vastupinge, mis aitab neil koheselt sulguda. Järgnevalt hakkab kondensaator laaduma vastupidise polaarsusega, lõpetades laadumise enne järgmist lülitushetke. Mida suurem on vool, seda kiiremini laadub kondensaator ümber ning seda lühemad on kommutatsiooni ajad.
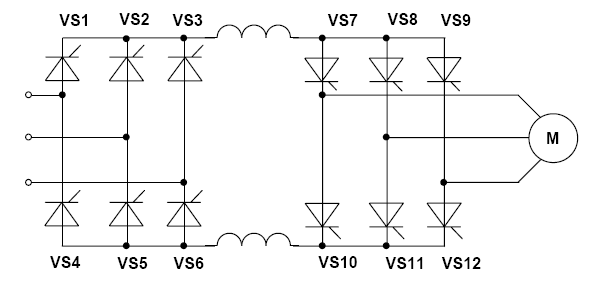
Türistoridel põhinevaid vooluvaheldeid kasutatakse kõige laialdasemalt võimsuste vahemikus 50 kuni 3500 kW ja pingeni kuni 700 V. Välja on töötatud ka antud vaheldite kõrgepingelisi variante pingega 3,3/6,6 kV, aga need pole osutunud majanduslikult otstarbekaks. Joonisel 6 on kolmefaasilise sundkommutatsiooniga türistor-vooluvaheldi jõuahela skeem.
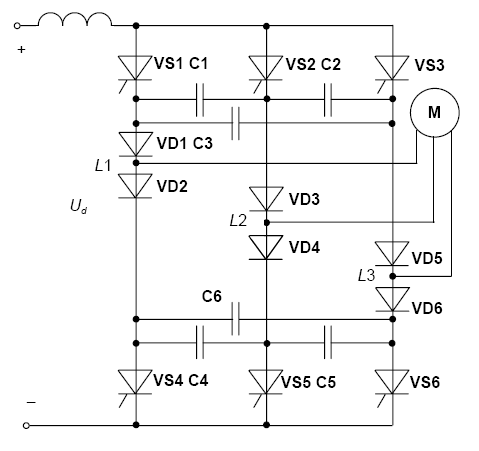
Alalisvooluallikast võetav vool lülitatakse koormusele kindla järjestusega ning nõutava sagedusega. Jõuahelas dioodid takistavad kondensaatoritel kaotada järgmise kommutatsiooni toimumiseks vajalikku laengut, sest ilma nende dioodideta laadub kondensaator tühjaks läbi koormuse kahe faasi.
Mitmemootorilistes elektriajamites kasutakse vaheldite süsteemid- “üks muundur – mitu mootorit” ja “üks muundur – üks mootor.” Esimese variandi maksumus on madal, sellel on keskmise keerukusega juhtimissüsteem, head dünaamilised ja staatilised tunnusjooned ja piisav töökindlus, kuid samas nõuab täiendavat arendusetappi ja mittestandardset teenindust. Teine variant põhineb standardsetel seadistel ja skeemilahendusel, kuigi on kallim ja juhtimisprobleemid tekivad mootorite koormuste märkimisväärse omavahelise sõltuvuse korral. Tänapäeval on mitmeastmelised vaheldid eelistatuimad kõrgepingelistes ja suurevõimsuselistes rakendustes. Koos pinge kasvuga suureneb ka jõuahelate keerulisus.
Resonantsvaheldid. Kõigis ülalkirjeldatud skeemides töötavad elektronseadised lülititalitluses, kus nõutakse kogu koormusvoolu sisse-või väljalülitamist iga lülituse puhul. Lülitid tugevalt koormatud ja lülitamisel tekivad suured võimsuskaod, mis kasvavad proportsionaalselt lülitussageduse kasvuga. Teiseks märkimisväärseks puuduseks on siin suurte voolude ja pingete siirdeprotsessidest põhjustatud elektromagnetiline müra. Need puudused süvenevad lülitussageduse kasvuga, mis võimaldab vähendada vaheldite mõõtmeid ja massi ning suurendada erivõimsust.
Kõrgeid lülitussagedusi võib kasutada juhul, kui lülitusprotsess toimub hetkel, millal lüliti pinge ja/või seda läbiv vool on lülitushetkel võrdne nulliga. Seadmete mõõtmete vähendamine on üks edasiviivaid jõude kaasaegses jõuelektroonikas ning seetõttu sattusid suure tähelepanu alla resonantsvaheldid. Resonantsvaheldid on lülitavad vaheldid, milles juhitav lüliti sulgub või avaneb nullpinge (nullpingelüliti) ja/või nullvoolu (nullvoolulüliti) korral. Tänu resonantsile on võimalik traditsioonilise raske lülituse asemel kerge lülitus.
Resonantsvahelditel on kasutusel rööp-ja jadaresonantsahelad ning nende kombinatsioonid (segaresonantsahelad). Mootorisse sisenevat ja sealt väljuvat energiavoogu juhitakse resonantsi näivtakistusega, mida omakorda muudetakse lülitussagedusega. Laialt levinud on kolm resonantsahela ja koormusahela kombinatsiooni:
- jadaresonantsvaheldid, milles kasutatakse koormuse ja resonantsahela jadaühendust;
- rööpresonantsvaheldid, milles kasutatakse koormuse ja drosseli või resonantsahela kondensaatori rööpühendust;
- jada-rööpresonantsvaheldid, milles koormus on ühendatud üle resonantsahela ühe osa.
Teine liigitus lähtub drosseli asukohast vaheldi jõuahelas:
- võrguresonantsvaheldid, drossel paikneb alalisvoolu poolel;
- koormusresonantsvaheldid, drossel paikneb vahelduvvoolu poolel.
Vahelduvvoolumuundurid – regulaatorid
Muundurit, mis muundab vahelduvpinge teise pinge, sagedusega, faasinihkenurgaga või kujuga vahelduvpingeks, nimetatakse vahelduvvoolumuunduriks või regulaatoriks. Esimene grupp selliseid muundureid on vahetud sagedusmuundurid, mis muudavad vahelduvpinge sagedust ja kuju. Teise gruppi kuuluvad alalisvoolu vahelüliga sagedusmuundurid, milles alaldit kasutatakse pingeregulaatorina või konstantse pingega sisendlülina, kus vaheldi genereerib teatud sageduse ja väärtusega pinget.
Tsüklokonverterid on loomuliku kommutatsiooniga toitevõrguga sünkroniseeritud sagedusmuundurid. Tavaliselt kasutatakse neid sageduse vähendamiseks suure võimsusega (kuni kümned megavatid) rakendustes. Türistorid sulguvad tsüklokonverterites loomuliku kommutatsiooni tulemusena, st sulguvad juhul, kui anoodvool läbib nulli ning on peaaegu ainsad seadmed, mis on võimelised lülitama pingeid ja voolusid eelnevas võimsusvahemikus. Praktikas kasutatakse 3-, 6-, 12- ja 24-pulsilisi tsüklokonvertereid.
Tsüklokonverterite lülitused võib jagada kaheks: otsesed üheastmelised tsüklokonverterid ja kaudsed kaheastmelised tsüklokonverterid.
Joonisel 5.18 on näidatud ühefaasilise kaudse tsüklokonverteri jõuahela skeem. Selle vasak ja parempoolsed alammuundurid kujutavad endast võrgupoolset ning koormusepoolset tüüritavat alaldit, mis mõlemad võivad töötada nii alaldite kui vahelditena.
Allikas: R. Jansikene, V. Vodovozov, D. Vinnikov, Elektriajamite elektroonsed süsteemid, TTÜ elektriajamite ja jõuelektroonika instituut, 2008-240 lk.
Türistoride tüürsignaal määrab väljundpinge sageduse, polaarsuse ja amplituudi. See tähendab, et kahe alammuunduri tüürnurgad sõltuvad juhtsignaalist. Sel ajal kui tüürnurgad muutuvad miinimumist maksimumini, sõltuvad võimalikud sageduste väärtused seadesignaali väärtusest.
Kuuepulsilise kaudse tsüklokonverteri elektriline skeem on joonisel 5.19 Antud seadmel on kolmefaasiline sisend ja ühefaasiline sisend, mis koosneb kahest vasturööpselt lülitatud kolmefaasilisest sillast, kus türistorid sulguvad tänu pinge loomulikule kommutatsioonile.
Mõlemasuunalise koormusvoolu juhtimiseks on “negatiivne muundur,” mis juhib negatiivset voolu rööpühenduses“positiivse muunduriga”. Sellist lülitust tuntakse loomuliku kommutatsiooniga tsüklokonverterina. Antud tsüklokonverter annab väljundis vahelduvpinget ning juhib mõlemasuunalist koormusvoolu. Türistoride tüürnurki juhitakse nii, et väljundpinge oleks võimalikult lähedane siinuspingele.
Voolu sujuva kommutatsiooni tagamiseks ühelt sillalt teisele muudetakse tüürnurka hetkeliselt üle 45 elektrilise kraadi ja sild läheb vahelditalitlusse.
Väljundpinge sagedus jääb alati vähemalt toitepinge sagedusest, kaks korda madalamaks. Peale selle tundub suur hulk türistore skeemis esmapilgul ebavajalik. Tsüklokonverterid pakuvad huvi eeskätt suurtes süsteemides, kus rööpsed türistorsillad võivad osutuda vajalikeks muunduri teistes ahelates.
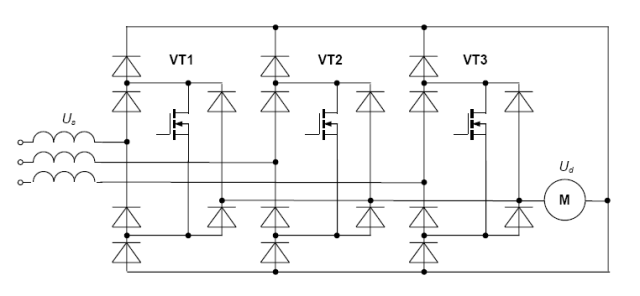
Alalisvoolu vahelüliga sagedusmuundurid kasutatakse kõigis tööstusharudes, nii ühe-kui mitmemootorilistes elektriajamites nende sõltumatu stabiilsuse, teenindusvaba talitluse ja kõrge kasuteguri tõttu. Tänu alalisvoolu vahelülis salvestatud pingele töötavad muundurid stabiilselt ülekoormusel ja tühijooksul ning võivad seiskuda olenevalt koormusest ilma täiendava käsusignaalita. Tavaliselt töötavad need ühes, kahes ja neljas kvadrandis, kui lisatakse vajalikud lisaseadmed. Reeglina ületab selliste muundurite väljundpinge väärtus sisendpinge väärtuse ning kasvab võrdeliselt väljundsagedusega. Väljundsageduste vahemikud on tavaliselt 0,1…10 Hz ja 120…400 Hz. Joonisel 5.20 on toodud mittetüüritava alaldiga alalisvoolu vahelüliga sagedusmuunduri jõuahela skeem.
Dioodidega VD1…VD6 alaldi muundab kolmefaasilise või ühefaasilise vahelduv-sisendpinge sellega võrdeliseks alalispingeks. Sagedusmuunduris kasutatakse vaheldis IGBT-transistore või väljatransistore ning vabavooludioode.
Tavaliselt ühendatakse alaldussild võrgupingele läbi drosselite või trafode, et kaitsta võrgupinget muundurist tulevate mittelineaarsete moonutuste eest. Sisendalaldi ja transistorvaheldi vahele on ühendatud reaktor (drossel) L, mis on ette nähtud muunduri kaitseks ja talitlusviisi optimeerimiseks. Tänu siludrosselile on alaldi väljundpinge madala pulsatsiooniga, mis samuti vähendab liigpingeimpulsse ja rikkevoolu. Mõnikord sillatakse drossel vabavooludioodiga VD7, et vähendada tagasimõju avatud lülitite puhul.
Suure mahtuvusega elektrolüütkondensaator C kaitseb alalisvoolulüli liigpingete eest. Kondensaator “tugevdab” alalisvoolulüli pinget, moodustades kiirelt muutuva vooluga haru.
Mõningates lülitustes on alalisvoolulüli sillatud täiendava RC ahelaga, mis takistab kõrgemate harmooniliste pääsu pingesse. Kui muundur sisse lülitada, siis kondensaator laadub vähendades sellega käivitusvoolu. Kondensaator võimaldab alalisvoolul, konstantse koormuspinge puhul, vaheldi kommutatsiooni kestel ajutiselt kasvada või kahaneda.
Vaheldi lülitid VT1…VT6 toidavad vahelduvvoolumootorit nõutava pingega vahelduvvooluga. Transistorvaheldi juhtimisega võimaldavad kahesuunaline vool ja pinge kahekvadrandilist talitlust, kus vastassuunaline energiavoog saadakse transistoride juhtimise abil.
Elektrilise pidurduse tagamiseks neljakvadrandilises talitluses hajutab vaheldi vabaneva soojusenergia alalisvoolulülis. Sel ajal, kui lülitid on avatud, moodustavad tagasiside dioodid induktiivvoolu juhtimiseks alternatiivse vooluahela. Dioodid suunavad regeneratiivse võimsuse alalisvoolu vahelülisse, mis tõstab lüli pinge kõrgemaks nimiväärtusest ning selle energia hajutamine võib põhjustada alalisvoolu vahelüli pinge ohtlikku kasvu.
Tavaliselt kasutatakse pinge liigse kõrgenemise vältimiseks, st pidurdusenergia hajutamiseks koos energiasalvestitega veel spetsiaalset pidurdustransistori VT7 ning kondensaatoriga C rööpselt lülitatud pidurdustakistit R. Harilikult avaneb pidurdustransistor automaatselt, kui alalisvoolu vahelüli pinge ületab teatud väärtuse. Sõltuvalt juhtimissüsteemi riistvarast tuleb täiendavalt alaldi, pidurdustransistori või vaheldi ja mootori vahel kasutada vooluandureid. Need mõjutavad transistoride juhtimist sõltuvalt talitluse voolust ning tagavad ohutuse.
Tulenevalt sisendalaldist on antud lülitusel mõningad puudused:
- vahelduv-toitevool on mittesiinuseline ning seetõttu võib häirida teiste tarvitite normaalset talitlust
- voolu harmoonilised moonutused põhjustavad pinge moonutuse, mis võib häirida samasse võrku lülitatud muude tarvitite tööd
- antud lülitus ei saa töötada mootori sagedaste käivituste, pidurduste ja voolu suuna muutuste korral.
Eelnimetatud probleemide lahenduseks kasutakse sagedusmuundur (joonis 5.21) mis on võimeline energiat üle kanda mõlemas suunas.
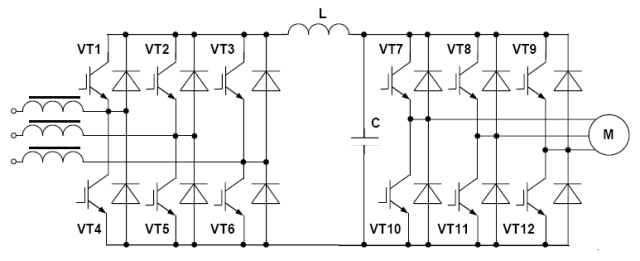
Alaldi skeem on sarnane sõltumatu vaheldi skeemiga, kuid talitleb nagu võrguga sünkroniseeritud muundur. Mootori talitluses, kui koormus saab elektrienergiat võrgust juhib transistoralaldi voolu läbi dioodide, aga vahelditalitluses läbi transistoride.
Pidurdustalitluses läheb vaheldi üle alalditalitlusse, juhtides voolu läbi dioodide, aga alaldi läheb üle vaheldi talitlusse, juhtides voolu läbi transistoride. Selle lülituse eeliseks on paindlik mõlemasuunaline energia ülekanne koormusesse ning koormusest tagasi toitevõrku. Lihtne energia tagastus toitevõrku saadakse sümmeetrilise ahelaga, võimsusteguri juhtimisega positiivses ja negatiivses piirkonnas ning laia sagedusvahemikuga all- ja ülalpool võrgusagedust. Normaalseks talitluseks on toiteahelas vajalik minimaalne induktiivsus hoidmaks ära avariiolukordi kommutatsioonil. Liinireaktorid (drosselid) osutuvad vajalikeks juhul, kui võrk on madala häirekindluse ja näivtakistusega.
Trafod ja drosselid
Trafode ja drosselite vajadus. Trafode ja drosselite (reaktorite) vajadus tekib siinuspingega tööstusvõrkude korral, kus pinge kõikumine võib häirida elektriajamite talitlust. Nimipingel talitleb ajam normaalselt. Kui aga seda väärtust ületatakse, võib ajam seiskuda ning rikneda. Vähemtähtis on toitepinge sagedus. Ilma alalisvoolu vahelülita kasutatakse elektriajami toitevõrku lülitamiseks kahte meetodit – läbi trafo või voolu piirava induktiivsuse, mida sageli nimetatakse reaktoriks või drosseliks. Trafo madaldab toitepinget kooskõlas muunduri võimsusega, mis tagab pooljuhtseadiste parema ärakasutamise. Juhul kui kasutatakse keskväljavõttega täisperioodalaldit, on ainsaks võimaluseks sekundaarmähises neutraalpunkti tekitava keskväljavõttega trafo kasutamine.
Trafo kasutamine suurendab aga elektriajami massi ja mõõtmeid ning vähendab kasutegurit. Induktiivsus pooljuhtide anood-ja katoodahelas põhjustab omakorda aeglase kommutatsiooni ja muunduri suurema energiatarbe. Teisalt, piiravad induktiivsed elemendid seadmete toitevoolu ning kaitsevad seadet lühiste eest. Selle poolest on toitevõrgupoolsed liinireaktorid eriti efektiivsed.
Ajami installeerimisel on drosselite kasutamiseks palju erinevaid vajadusi. Toitepoole drossel asendab mitmeid voolu piiravaid mahtuvuslikke komponente, vähendab häireid toiteliinides, kaitseb kommutatsiooni liigpingete eest ja parandab süsteemi võimsustegurit laias võimsuste ja kiiruste vahemikus. Kui drossel asub vaheldi ja mootori vahel, vähendab see nii rikke-kui lekkevoolu. Alalisvooluahelates vähendab drossel kõrgemate harmooniliste poolt tekitatud pinge moonutusi ja vähendab pulsatsiooni.
Trafo. Jõuelektroonika seadistes on hädavajalik, et trafo (joonis 5.22) koosneks kahest või enamast tihedalt sidestatud mähisest, kus kogu magnetvoog tekitatakse ühe mähise või selle sektsiooni poolt.
http://d1105488.mydomainwebhost.com/usuarios/Toni/web_magnetismo_3/imagenes/transformador_3d.jpg
Trafo madaldab toitepinge efektiivväärtuse U1 väärtusele U2, mis mõnikord on alaldites sobivam kasutada. Primaarmähise keerdude arv on w1 ja sekundaarmähise keerdude arv w2. Sekundaarmähises indutseeritud pinge avaldub kujul
U2=W2/W1·U1=U1·KW,
Kus KW trafo ülekandesuhe, järelikult trafo sekundaarvool on:
I2=I1·KW.
Seega sõltuvad trafo voolude ja pingete suhted keerdude arvu suhtest. Trafo sekundaarnäivvõimsus on ligikaudu võrdne primaarnäivvõimsusega:
U2·I2 = U1·I1.
Tavaliselt on trafod ja muundurid projekteeritud koos ning seetõttu pole trafo tehnilisi andmeid eraldi allikates.
Trafo magnetsüdamiku materjali valik peab olema kooskõlas südamiku mõõtmetega ja pinge sagedusega. Ferriit on siin parim mehaanilise tugevuse poolest. Kõrgsageduslikel ferriitidel on kõrgem eritakistus ning seega väiksemad pöörisvoolukaod. Siiski on nende magnetiline läbitavus suurema magneetimisvoolu tõttu üldiselt väiksem. Metallisulamist südamikel on kõrge eritakistus ning need koosnevad õhukestest plaatidest (plekkidest). Sellele vaatamata on nende küllastust tekitav magnetiline induktsioon palju suurem kui ferriitidel, kuid see ei oma tähtsust, sest magnetvoogu piiravad rangelt pöörisvoolukaod.
Allikas: http://www.youtube.com/watch?v=i4eyG99jC1c
Teine tähtis näitaja trafo puhul on magnetahela ava konfiguratsioon. Ava peab olema nii lai kuivõimalik, et suurendada mähise laiust ja vähendada kihtide arvu. Eelmainitu tagab minimaalse takistuse ja puisteinduktiivsuse. Peale selle mõjutab laiem ava trafo mõõtmeid vähem. Laiema ava korral kulud vähem mähisetraati ning ava on paremini ära kasutatud. Mantelsüdamikel ja PQ-südamikel on südamiku pinnaga võrreldes väiksem ruudukujuline ava.
Mähis täidab peaaegu kogu ava ning mähise laius on lähedane optimaalsele. Selline südamik pole mõeldud kõrgsageduslikele rakendustele. Üks mantelsüdamike ja PQ-südamike eeliseid, võrreldes E-E-südamikega, on parem magnetiline varjestus. EC, ETD ja LP-südamikud on kõik E-E-südamike eritüübid. Nendel on lai ava, võrreldes südamiku mõõtmetega, ja soovitatav konfiguratsioon.
Toroidsüdamike korral peavad mähise keerud olema terve südamiku ulatuses ühtlaselt jaotatud. Seegapaikneb kogu mähis südamiku ümber, tagades madala puisteinduktiivsuse ning minimaalse mähise kihtide arvu. Puisteinduktiivsus on siin samuti väga madal. Põhiprobleemiks toroidsüdamike puhul on asjaolu, et mähiste valmistamine on keeruline. Kõrgete sageduste puhul muutuvad üha populaarsemaks tasapinnalised südamikud, mis toovad uues valguses vaatluse alla väga vanad probleemid trafode arvutamisel. On kindel, et Faraday ja Ampere seadused on senini rakendatavad, kuid tasapinnaliste südamike korral muutuvad magnetiline induktsioon ja magnetvälja tugevus kõikides südamiku tähtsates piirkondades, mis muudab arvutuse palju keerulisemaks.
Trafo kasutamine suurendab aga elektriajami massi ja mõõtmeid ning vähendab kasutegurit. Teisest küljest vähendavad induktiivelemendid liinivoolusid ning lihtsustavad kaitsenõudeid lühise korral.
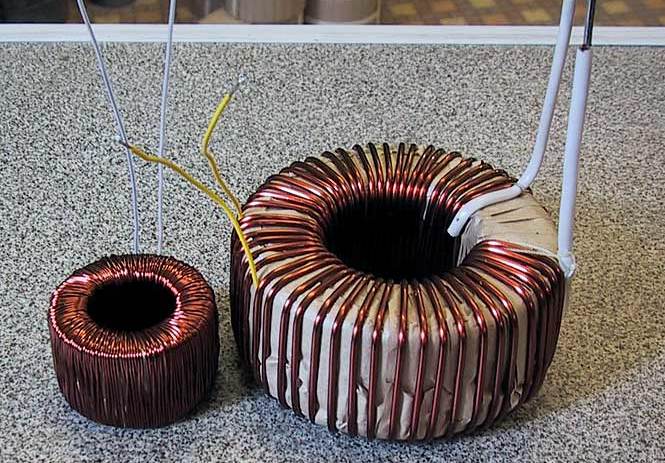
Drossel.Induktiivkomponentide tootjad (MTE Corp., AFP Transformers, Precision Electronics jt) pakuvad laia valikut drosseleid, mis sobivad alalisvoolumuunduritesse. Mõned neist on tasapinnalise paigaldusega (joonis 5.24).
Allikas: http://www.dialelectrolux.ru/files/image/Epcos/inductors/induct_power_i_chokes.jpg
Drosselite populaarseimad südamike materjalid on ferriidid ja pulbermetallurgiline teras. Rull-ja varrassüdamikud on kergesti kättesaadavad, kuid kallid ning põhjustavad rohkem häiringuid. Drosselid piiravad lühisvoolusid pooljuhtseadistes. Reeglina vajatakse diood-ja türistoralaldites siludrosselit kui pulsatsioon ületab 10 %.

{kind=link}
{kind=link}
{kind=link}
{kind=link}