
ANDURID
JÕU- JA MEHAANILISE PINGE ANDURID
Enimkasutatavad jõu- ja mehaanilise pinge andurite tüübid on järgmised:
- tensoandurid;
- piesoelektrilised andurid;
- magnetoelastsed andurid.
Tensoandurid
Tensoandurid on kas elektrijuht- või pooljuhtmuundurid. Nende talitlus põhineb venitusefektile.
Venitusefekt on anduri aktiivtakistuse muutus selle geomeetrilise suuruse ja vastupanu muutuse tõttu elastsel mehaanilisel deformatsioonil. Sel viisil saadud muutust iseloomustavad suhteliselt väikesed väärtused. Venitusefekti kvantitatiivseteks tunnusjooneks on suhtelise venitustundlikkuse tegur k, mis on määratud avaldisega
(3.1)
kus ![]() on voolujuhi takistuse
suhteline muutus ja
on voolujuhi takistuse
suhteline muutus ja ![]() on selle pikkuse
suhteline muutus. Suurel osal voolujuht-tensoanduritel k väärtused on 1.9 kuni 2.5.
on selle pikkuse
suhteline muutus. Suurel osal voolujuht-tensoanduritel k väärtused on 1.9 kuni 2.5.
Tensoandurid jaotatakse:
- voolujuht-tensoandurid;
- foolium tensoandurid;
- pooljuht-tensoandurid.
Voolujuht-tensoandurid
Joonis 3.1 kujutab kõige tavalisemat voolujuht-tensoanduri lihtsustatud ehitust.
Vooljuhtidena kasutatakse sulameid, nagu manganiin, konstantaan jne, kuna neil on väike takistuse temperatuuritegur (TCR) ja suur takistus.
Vooljuhi paigutuse pikkust А nimetatakse baasiks ja В on anduri laius.
Tensoandur kinnitatakse liimiga selle osa külge, mille deformatsiooni tuleb uurida. Selle pikkuse suund peab olema rööbitine mehaanilise pinge suunaga.
Kui
tensoanduri tegur k on teada ning
pärast tensomuunduri takistuse muutuse mõõtmist ![]() võib määrata selle
pikkuse suhtelise muutuse kui
võib määrata selle
pikkuse suhtelise muutuse kui
![]()
ja samuti tõmbe- või survepinge
![]()
(3.3)
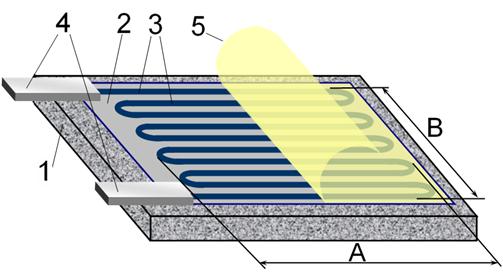
1 – uuritav osa; 2 – baas (õhuke isoleeritud paber või plastikpadi,
tavaliselt sitke pärgamiin või lakk - ![]() = 40...50 >m); 3 – voolujuht (d=0,01...0,03 mm); 4 – tinatatud
vaskjuhi klemmid (d=0,1...0,3 mm); 5 – kattekiht - kondensaatorpaber või lakk (
= 40...50 >m); 3 – voolujuht (d=0,01...0,03 mm); 4 – tinatatud
vaskjuhi klemmid (d=0,1...0,3 mm); 5 – kattekiht - kondensaatorpaber või lakk (![]() =10...15 m>m)
=10...15 m>m)
Joonis 3.1 Voolujuht-tensoandur [63]
Mõõdetav jõud F on määratud kui
![]()
(3.4)
kus s on objekti ristlõikepindala.
Kuna on võimatu kasutada ühte tensoandurit rohkem kui ühel objektil, tuleb märkida, et kasutatav k väärtus määratakse antud partii proovide statistilise keskmistamisega ja kalibreerimine teostatakse 8-10% näidistele partiist.
Selle tüübi tensoandurite puuduseks on nende suur risttundlikkus. Voolujuht-tenosandurite piki- ja risttundlikkus on määratud suhtega B/A.
Selle puuduse saab suures osas kõrvaldada ristpiirkondadesse paigutatud vasksildadega.
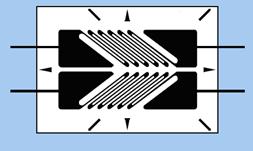
Foolium-tensoandurid
Foolium-tensoandureid kasutatakse praktikas laialdaselt (joonis 3.2).
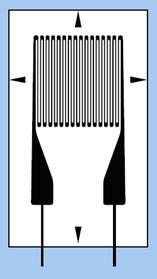
Joonis 3.2 Foolium-tensoandur [60]
Neid valmistatakse fotokeemilistel meetoditel. Metallfoolium kaetakse fototundliku kihiga ja sellele fotografeeritakse muunduri kuju. Nende eeliseks on voolujuhi suurem laius ristsuuna piirkondades, mis vähendab nende piirkondade takistust ja seega ka risttundlikkust.
Pooljuht-tensoandurid
Pooljuht-tensoandureid
valmistatakse sarnase meetodiga nagu foolium-tensoandureid. Nende rakendusi on
laiendatud, kasutades germaaniumist, ränist, gallium-arseniidist jne
pooljuhtmuundureid. Nende tõmbetundlikkus on tüüpiliselt 50-60 korda kõrgem kui
metall-tensoanduritel väga väikese baasi korral (2,5 mm). Nende
tõmbetundlikkuse tegur sõltub tugevasti temperatuurist ja tunnusjoon ![]() on mittelineaarne.
on mittelineaarne.
Foolium- või pooljuht-tensoandurite baasil valmistatakse tensoandurite erinevaid konfiguratsioone ning kombinatsioone.
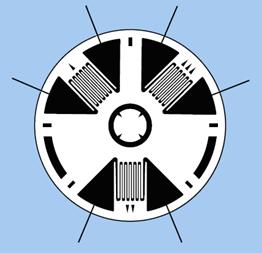
Joonis 3.3 Pooljuht-tensoandur [60]
Joonis 3.3 kujutab andurit 3 üksteise suhtes 120° all asetseva tensoanduriga. Need moodustavad roseti, mille kaudu saab määrata mõjuvate keerukate mehaaniliste pingete resulteeruva mehaanilise pinge antud kitsas alas (punktis).
Joonis 3.4 kujutab andurit, mis sisaldab kahte tensoandurit, mis on paigutatud 90° üksteise suhtes. Neid kasutatakse peamiselt mehaaniliste pingete ja pöördemomendi määramiseks pöörlevate masinate võllidel. (Joonis 3.5).
Joonis 3.4 Pooljuht-tensoandur 2x [60]
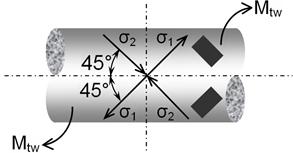
Joonis 3.5 Pooljuht-tensoandur 2x [60]
Piesoelektrilised andurid
Nende andurite töö põhineb piesoelektrilisele efektile, mis esineb mõnedes dielektrilistes materjalides. Kui sellisest materjalist lõigatud plaati mehaaniliselt koormata, see polariseerub ja tema pinnal tekivad rakendatud jõuga võrdelised elektrilaengud. Koormuse eemaldamisel polarisatsioon ja laengud kaovad. Seda nähtust nimetatakse otseseks piesoelektriliseks efektiks.
Kui selline plaat asetada elektrivälja, tekib temas mehaaniline pinge või muutuvad geomeetrilised mõõtmed. Seda nimetatakse kaudseks piesoelektriliseks efektiks.
Laialdaselt kasutatavate piesoelektrikute tüüpiliseks näiteks on moonutusteta kristallivõrega kvarts. Seignette sool ja mõned keraamilised materjalid: piesoelektrikutena kasutatakse ka kunstlikult polariseeritud baariumtitanaati, plii-tsirkoonium-titanaati jne.
Piesoelektrilised andurid on generaatori tüüpi. Elektrilised laengud tekivad välise jõu mõjul.
Jõudude mõõtmiseks kasutatava anduri tekitatud laengud ja pinge jäävad samaks ainult siis, kui mõõteahelal on lõpmata suur sisendtakistus, mis on praktiliselt võimatu.
Piesoandurite minimaalsed talitlussagedused on tavaliselt (1 ... 0,5) Hz. Staatiliste jõudude mõõtmiseks kasutatakse nn piesotrafosid (joonis 3.6).
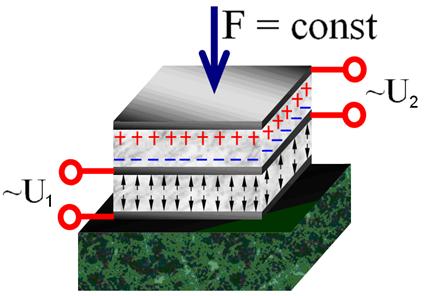
Joonis 3.6 Piesoelektriline andur [63]
Kaks
piesoandurit paigutatakse tulpa üksteise peale. Vahelduvpinge ![]() rakendatakse alumisele
andurile. Alumise kristalli geomeetrilised mõõtmed muutuvad sageduse taktis pöördpiesoelektrilise
efekti tulemusel, s. t. tekivad lainetused ja ta muutub emitteriks. Pealmine
staatilise jõuga koormatud muunduri seintel tekivad lainetest elektrilaengud
piesoelektrilise efekti tulemusel. Väljundelektroodide elektriliste
potentsiaalide vahe
rakendatakse alumisele
andurile. Alumise kristalli geomeetrilised mõõtmed muutuvad sageduse taktis pöördpiesoelektrilise
efekti tulemusel, s. t. tekivad lainetused ja ta muutub emitteriks. Pealmine
staatilise jõuga koormatud muunduri seintel tekivad lainetest elektrilaengud
piesoelektrilise efekti tulemusel. Väljundelektroodide elektriliste
potentsiaalide vahe ![]() >on võrdeline
rakendatud jõuga. Viimast saab määrata kas
>on võrdeline
rakendatud jõuga. Viimast saab määrata kas ![]() >väärtuse alusel või
>väärtuse alusel või ![]() ja
ja ![]() faasinihke järgi.
faasinihke järgi.
Praktikas piesotrafod on valmistatud ühtse kolme elektroodiga muundurina.
Magnetoelastsed andurid
Magnetelastsed muundurid põhinevad magnetoelastsel efektil, mis avaldub ferromagnetiliste materjalide magnetilise läbitavuse muutuses välistest jõududest põhjustatud mehaaniliste pingete toimel.
On olemas
ka vastupidine nähtus, mida nimetatakse magnetostriktiivseks efektiks, mis
avaldub magnetvälja paigutatud ferromagnetiliste materjalide geomeetriliste
mõõtmete muutuses. Seega, kui ferromagnetilise eseme mõõtmed suurenevad, on see
positiivne magnetostriktsioon ![]() , kui väli vähendab eseme mõõtmeid – negatiivne magnetostriktsioon
, kui väli vähendab eseme mõõtmeid – negatiivne magnetostriktsioon ![]() . Raual ja enamusel rauasulamitel esineb positiivne
magnetostriktsioon, kuid nikkel jt on negatiivse magnetostriktsiooniga.
. Raual ja enamusel rauasulamitel esineb positiivne
magnetostriktsioon, kuid nikkel jt on negatiivse magnetostriktsiooniga.
Magnetoelastse efekti abil saab mõõta jõude, mehaanilisi pingeid ja momente. Magnetostriktiivse efekti põhjal on välja töötatud ultrahelilainete allikaid.
Induktiivset tüüpi magnetoelastsed andurid
Induktiivset tüüpi magnetoelastne andur on kujutatud joonisel 3.7.
Joonis 3.7
Kui jõud F on rakendatud magnetsüdamikule,
tekivad mehaanilised venitused ja pinged ![]() , mille tulemusel muutub magnetiline läbitavus
, mille tulemusel muutub magnetiline läbitavus ![]() , põhjustades magnetilise takistuse
, põhjustades magnetilise takistuse ![]() muutuse. Kui
muutuse. Kui ![]() muutub, siis pooli
induktiivsus L muutub, mis põhjustab
näivtakistuse z muutuse.
muutub, siis pooli
induktiivsus L muutub, mis põhjustab
näivtakistuse z muutuse.
 ;
; ;
;![]()
(3.5)
Kui ![]() , siis
, siis ![]()
Seega
![]()
(3.6)
Andur joonis 3.7 positiivsel magnetostriktsioonil
![]()
(3.7)
kehtib, kus ![]() on pooli algne
näivtakistus, kui F=0.
on pooli algne
näivtakistus, kui F=0.
3.3.2. Vastastikku induktiivset tüüpi magnetoelastsed andurid
Iga magnetelastse muunduri võib muuta vastastikku induktiivset (trafo-) tüüpi muunduriks, kui ümber magnetsüdamiku kerida mõõtepool (joonis 3.8).
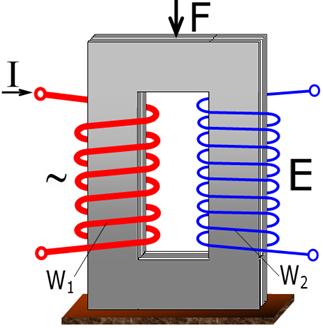
Joonis 3.8 Magnetoelastne andur [63]
Seda tüüpi muundurites

![]()
(3.9)
kehtib.
Vastastikku induktiivset tüüpi magnetoelastne muundur positiivse magnetostriktsiooni korral joonis 3.10
![]()
(3.10)
kehtib.
Vaadeldud muundurid võivad olla üksikud ja diferentsiaalsed. Joonis 3.9 illustreerib magnetoelastset painduva magnetahelaga trafo-diferentsiaalmuundurit.
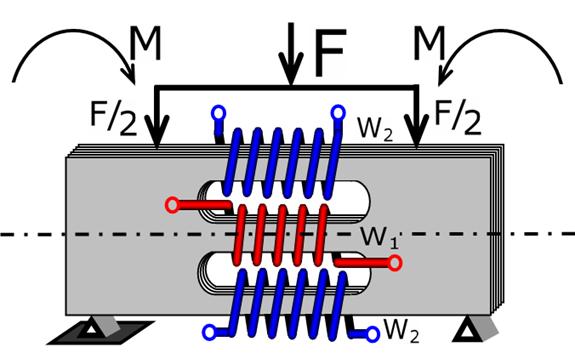
Joonis 3.9 Magnetoelastne painduva magnetahelaga trafo-diferentsiaalmuundur [63]
Ferromagnetilisest
materjalist varras asetatud kahele toele. Ergutusmähis W1 asetseb keskmisel sambal ning mõõtepooli kaks
sektsiooni ![]() ja
ja ![]() on paigutatud teisele
kahele sambale.
on paigutatud teisele
kahele sambale.
Magnetoanisotroopsed muundurid
Nn magnetoanisotroopsed muundurid kuuluvad magnetoelastsete muundurite hulka. Nad põhinevad ferromagnetiliste materjalide magnetilisel mitteisotroopsusel, kui neis tekivad välistest jõududest põhjustatud mehaanilised pinged.
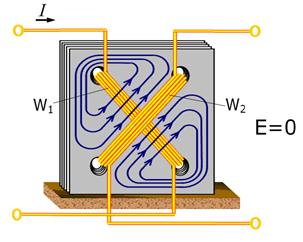
Joonis 3.10 Magnetoanisotroopsed muundurid [63]
Mitteisotroopsus on materjalide magnetilise läbitavuse erinevus erinevates geomeetrilistes piirkondades. Muundur on kujutatud joonisel 3.10. See on trafotüüpi.
Magnetsüdamik on valmistatud lehtmaterjalist. Sellesse on puuritud neli ava, mis asuvad ruudu tippnurkades. Ergutusmähis W1 ja mõõtemähis W2 on paigutatud üksteise suhtes täisnurga alla, mis väldib nendevahelist induktiivset sidet.
Kui mõõtemuundur on koormamata (F=0 - joonis 3.12а), siis materjalis pole magnetilist mitteisotroopsust. Ergutusmähise tekitatud magnetvoog kulgeb piki jooni, mis ei lõiku mõõtemähisega W2 ja selles ei teki e.m.j.
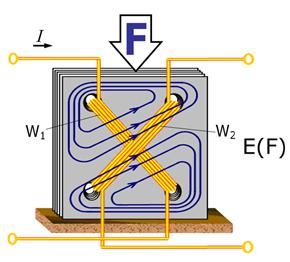
Kui rakendatakse jõudu F (joonis 3.12b), tekivad magnetsüdamikus mehaanilised pinged – sel juhul need on survepinged. Magnetiline mitteisotroopsus tekib materjalis. Positiivse magnetostriktsiooni korral magnetiline läbitavus väheneb rakendatud jõuga paralleelses suunas, kusjuures jõuga ristsihis magnetiline läbitavus väheneb. Selle tulemusena magnetvälja jõujooned moonduvad. Osa nendest jõujoontest ümbritsevad mõõtemähise ja e.m.j.
![]()
indutseeritakse selles võrdeliselt jõuga.
