
TÄITURID - PNEUMAATILISED JUHTIMISKOMONENDID JA TÄITURID
Pneumaatilised juhtimiskomponentide klassifikatsioon
Pneumaatiliste täiturite rakendamiseks on vajalikud juhtimiskomponendid, millede ülesandeks on vajalike juhtimissignaalide tekitamine, täiturite liikumiskiiruse, suruõhu rõhu reguleerimine ja muude juhtimisoperatsioonide täitmine pneumosüsteemides. Juhtimiskomponendid on (Joonis 4.1):
Joonis 4.1. Pneumaatilised juhtimiskomponendid
Pneumojaotid
Pneumojaotid on pneumokomponendid, mille abil muudetakse suruõhu liikumisteekonda pneumotorustikes.
Pneumoskeemides kujutatakse pneumojaoteid tingmärkidena, milles ei kajastu pnumojaoti ehitus, vaid ainult nende poolt täidetav funktsioon.
Nullasendiks nimetatakse (nt. vedruga tagastuval pneumojaotil) seda asendit, milles paiknevad pneumojaoti liikuvad osad, kui pneumojaoti ei ole rakendunud olekus. Lähteasendiks nimetatakse asendit, millisesse liiguvad pneumojaoti liikuvad osad, kui pneumoskeem, millesse ta on lülitatud, ühendatakse pneumovõrku ja millest algab pneumoseadme töötsükkel.



Pneumaatiline lõpulüliti Kangiga juhitav pneumojaoti Trossiga juhitav pneumojaoti


Rullikuga juhitav pneumojaoti Elektriliselt juhitav pneumojaoti
Joonis 4.2. Pneumojaotite näited
Pneumojaotite tingmärgid
Pneumoskeemides kujutatakse pneumojaoteid tingmärkidena, milles ei kajastu pnumojaoti ehitus, vaid ainult nende poolt täidetav funktsioon. Pneumojaotite tingmärgid vastavad standardile DIN ISO 1219 [31]
Nullasendiks nimetatakse (nt. vedruga tagastuval pneumojaotil) seda asendit, milles paiknevad pneumojaoti liikuvad osad, kui pneumojaoti ei ole rakendunud olekus.
Lähteasendiks nimetatakse asendit, millisesse liiguvad pneumojaoti liikuvad osad, kui pneumoskeem, millesse ta on lülitatud, ühendatakse pneumovõrku ja millest algab pneumoseadme töötsükkel.
Liiteid kujutatakse lähtasendist
Pneumojaoti sisemisi liiteid kujutatakse punktiga kanalite ühenduskohas
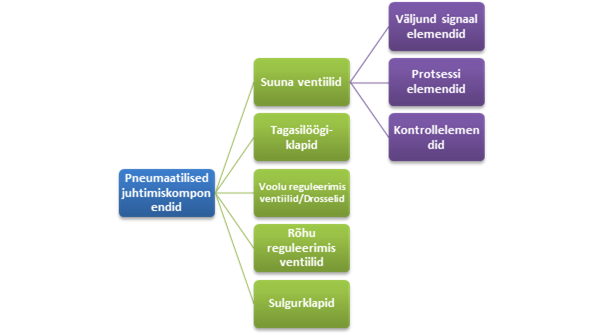
Pneumojaoti tööasendit kujutatakse ruutudena |
|
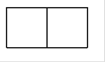
Ruutude arv määrab ara pneumojaoti tööasendite arvu |
|
Pneumojaoti sisemised ühendused kujutatakse õhu voolusuunda osutavate nooltega |
|
Suletud avasid tähistatakse risti joonega |
|
Liiteid kujutatakse null või lähtasendis |
|



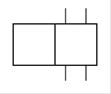
Pneumojaoti tähistuses näitab esimene number pneumojaoti avade arvu (väljaarvatud juhtimisavad) ja teine number pneumojaoti tööasendite arvu.
Näide: 3/2 pneumojaoti 3 ava 2 asendit 4/3 pneumojaoti 4 ava 3 asendit (Joonis 4.3, Joonis 4.4)
Joonis 4.3. Pneumojaoti avade arv: Avade arv 3
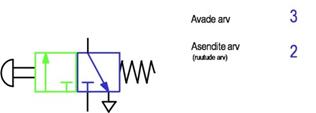
Joonis 4.4. Pneumojaoti asendite arv: Avade arv 3; Asendite arv 2
![]()
Joonis 4.5. Algasend
Selleks, et määratleda pneumojaoti avasid, kasutatakse järgnevaid avade tähistussüsteeme DIN ISO 5599-3 (Joonis 4.6):
Tähed |
Ava nimetus |
Numbrid |
||
|---|---|---|---|---|
|
P |
Toide |
1 |
|
A,B,C |
Tööväljund |
2,4,6 |
||
|
R,S,T |
Tühjenemine |
3,5,7 |
|
X,Y,Z |
Juhtava |
10,12,14 |
||
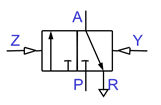
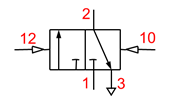
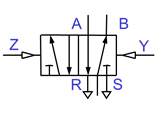
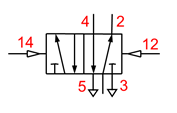
Joonis 4.6. Avade tähistus
Pneumojaotite juhtimismeetodid
Juhtimisviisi poolest eristatakse:
Pideva juhtimisega. Pneumojaoti on rakendunud asendis nii kaua kuni kestab juhttoime: kas manuaalne, pedaaliga, mehaaniline, pneumaatiline, elektriline (lülitus lähteasendisse toimub kas manuaalselt või vedruga). Neid pneumojaoteid nimetatakse ka monostabiilseteks.
Impulssjuhtimisega. Pneumojaoti viimiseks uude asendisse mõjutatakse jaotit juhtsignaaliga suhteliselt lühikese aja vältel (impulsiga). Peale juhtsignaali lõppemist jääb jaoti uude asendisse. Pneumojaoti muudab oma asendit alles uue juhtimissignaali toimel. Neid pneumojaoteid nimetatakse ka bistabiilseteks.
Pneumojaotite juhtimiseks kasutatakse järgnevaid tingmarke mis vastavad standardile DIN ISO 1219:
Manuaalne
Üldtähis ![]()
Surunupp ![]()
Lukustav hoob ![]()
Pedaal ![]()
Mehaaniline
Tagastusvedru ![]()
Keskele viiv
vedru ![]()
Rulllik ![]()
Ühesuunaline
rullik ![]()
Pneumaatiline
Otsene
juhtimine ![]()
Kaudne
juhtimine ![]()
Elektriline
Ühe mähisega ![]()
Kahe mähisega ![]()
Kombineeritud
Kahe
mähisega, kaudne juhtimine ![]()
Pneumojaotites kasutatakse väga erinevaid juhtimismeetodeid: mehaaniline, pneumaatiline, elektromagnetiga või kombineeritud (kasutatakse erinevaid meetodeid nt. juhtimine pneumaatiliselt ja mehaaniliselt).
Kasutaja vaatevinklist on oluline eristada vahetut juhtimist ja võimendusega juhtimist (vt. Pneumojaotite juhtimist kajastavad tingmärgid).
Vahetu juhtimise korral kantakse juhttoime pneumojaoti klappidele või siibritele üle vahetult. Antud juhtimise puuduseks on see, et suuremate pneumojaotite juhtimiseks vajalik juhtimisenergia peab olema suhteliselt suur (jõud nuppude või tõukurite liigutamiseks, elektromagneti võimsus jne). Samal ajal on aga plussiks see, et nad on tundetud tüüritava õhu rõhu suhtes.
Võimendusega juhtimise korral juhitakse nn abijaotit, mille kaudu omakorda toimub pneumojaoti juhtimine
Pneumojaotite näited
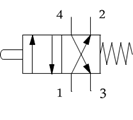
4/2 – pneumojaoti, ümberlülitav ![]()
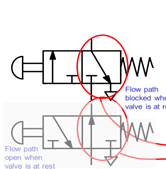
3/2 – pneumojaoti normaalasendis
avatud ![]()
4/3 – pneumojaoti keskasendis
tühjenev ![]()
2/2 – pneumojaoti normaalasendis
suletud ![]()
5/3 – pneumojaoti keskasendis
avatud ![]()
Pneumoskeemi kujutamine
Pneumaatika protsessi skeem joonestatakse kindlate reeglite järgi (Joonis 4.7):
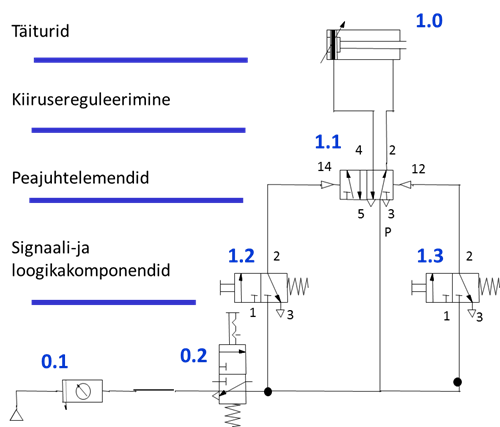
Joonis 4.7. Pneumoskeemi kujutamine
Pneumokomponentide numeratsioon on järgmine:
Grupp 1,2,3... – individuaalsed kontrollahelad (silindrite kaupa)
Grupp 0 – energiajaotuselemendid
Seerianumbrid:
.0 – tööorgan
.1 – peajuhtelement
.2,.4,.6,...(paarisnr.)- kõik elemendid, mis avaldavad mõju (+) liikumisele
.3,.5,.7,...(paaritud) - kõik elemendid, mis avaldavad mõju (-) liikumisele
.01,.02,... – kõik elemendid, mis on juht-ja tööelemendi vahel (drosselid)
Pneumojaotite ehitus (Klappjaotid; Siiberjaotid)
Pneumojaotite konstruktsioone; Klappjaotid; Siiberjaotid
Pneumojaoti konstruktsioon määrab ära pneumojaoti tööea, tema juhtimise, liidete konstruktsiooni ja mõõtmed. Kuigi pneumojaotite konstruktsioon areneb pidevalt on praegu laiemalt kasutusel järgmist tüüpi pneumojaotid.
Klappjaotid:
- kuulklapiga,
- plaatklapiga.
Siiberjaotid:
- kolviga,
- plaadiga,
- pöördsiibriga jaotid.
Klappjaotid
Antud pneumojaotites toimub õhu liikumissuuna muutmine avatava ja suletava kuulklapi või plaadi toimel. Klapi tihendamine toimub üldjuhul elastsete tihendite kasutamisega. Seda tüüpi pneumojaotites on suhteliselt vähe liikuvaid detaile, tänu millele on nende tööiga pikk, ning nad on suhteliselt tundetud mehaanilistele lisanditele suruõhus. (Joonis 4.8; Joonis 4.9; Joonis 4.10)
Juhtimiseks vajalik jõud on suhteliselt suur, kuna pneumojaoti asendi muutmiseks tuleb ületada sisseehitatud vedru ja juhitava õhuvoolu rõhust tingitud jõud. [31]
Kuulklapiga pneumojaotid on oma ehituselt lihtsad, väiksemõõtmelised ja seetõttu ka odavad.
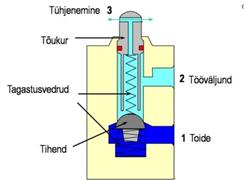
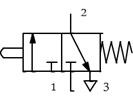
Joonis 4.8. Mehaaniliselt juhitav 3/2 klappjaoti
Joonis 4.9. Mehaaniliselt juhitav 4/2 taldrikklappjaoti
Klappjaotid on kindla tihedusega ja tolerantsed mustuse suhtes.


Joonis 4.10. Klappjaotid
Siiberjaotid
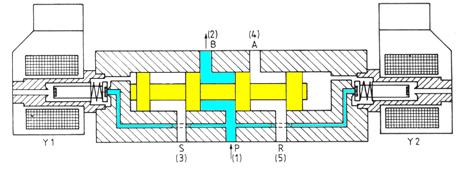
Võrreldes klappjaotitega iseloomustab siiberjaoteid suurem läbivool, kuid samal ajal on neil suurem ümberlülitumise aeg. Samuti ei ole nad nii hea tihendusega kui klappjaotid. Antud pneumojaotites on kasutusel liuguvad tihendid. Selleks, et vähendada tihendite kulumisest põhjustatud suruõhu leket, kasutatakse nendes pneumojaotites ühelt poolt õhuvoolu juhtimist siibriga, kuid tihenduses kasutatakse klappjaotite juures kasutatavaid konstruktsioonipõhimõtteid (Joonis 4.11; Joonis 4.12). [31]
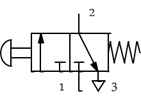
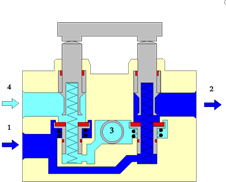
Joonis 4.11. Mehaaniliselt juhitav 3/2 siiberjaoti
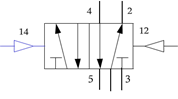
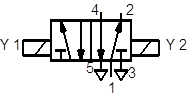
Joonis 4.12. Pneumaatiliselt juhitav 5/2 siiberjaoti
Siiberjaotid on kasutusel suurtel voolukiirustel või kui on vaja kasutada väikest jõudu
Bi- ja monostabiilne pneumojaoti. Kahepoolse toimega e. bistabiilne jaoti. Juhtsignaal muudab jaoti seisundit. Signaali katkestamisel jaoti säilitab seisundi (Joonis 4.13). Ühepoolse toimega e. monostabiilne jaoti. Juhtsignaal muudab jaoti seisundit. Signaali katkestamisel jaoti tagastub normaalseisundisse (Joonis 4.14).
Joonis 4.13. Kahepoolse toimega e. bistabiilne jaoti.
Joonis 4.14. Ühepoolse toimega e. monostabiilne jaoti.
4.1.7. Pneumojaotite vooluväärtused
Rõhukadu ja õhu voolukiirus on kasutaja jaoks tähtsad näitajad. Pneumojaoti valik sõltub:
- silindri mahust ja kiirusest
- nõutavast lülitussagedusest
- lubatavast rõhulangusest
Pneumojaotitel on määratud nominaalne voolukiirus. Vooluväärtuste arvutamisel tuleb arvestada mitmete teguritega. Need tegurid on:
- p1 rõhk jaoti sisendis (kPa või bar)
- p2 rõhk jaoti väljundis (kPa või bar)
- Δp diferentsiaalrõhk ehk rõhkude vahe (p1 – p2) (kPa või bar)
- T1 temperatuur (K)
- qn nominaalne voolukiirus (l/min)
Mõõtmise ajal liigub õhk ühesuunaliselt läbi pneumojaoti. Mõõdetakse sisend- ja väljundrõhku ning õhuvoolukiirust.
Pneumojaoti voolu nominaalväärtuste kohta leiab andmeid tootja tootekataloogist. [31]
Pneumojaotite paigaldamine ja töökindel toimimine
Lisaks pneumojaoti hoolikale valimisele on heade lülitusomaduste, stabiilse töö ning lihtsa juurdepääsu ning hooldamise tagamiseks väga oluline ka selle õige paigaldus. See kehtib nii juht - kui jõulülitusteks mõeldud jaotitele. Hooldus ja parandusoperatsioone lihtsustab oluliselt:
- komponentide süstemaatiline nummerdamine
- kirjeldavate siltide kasutusele võtmine
- sisukas ja kõikehõlmav dokumentatsioon
Käsijuhitavatele sisendsignaalideks mõeldud pneumojaotid paigaldatakse enamasti kontrollpaneelile või –lauale. Sellest tulenevalt on mugav ja otstarbekas kasutada jaoteid, mida saab kombineerida erinevate nuppude ja hoobadega. Erinevateks sisendfunktsioonideks on saadaval lai valik baasjaotiga kombineeritavaid elemente. Kontrollelementidena toimivad pneumojaotid juhivad pneumaatiliste jõuelementide tööd. Nende ehitus peab tagama täiturite kiire reageerimise antud signaalile. Jõuelemendina toimiv pneumojaoti peab seega olema täiturile nii lähedal, kui võimalik, et voolikute pikkusest tulenevad viited hoida nii lühikesed, kui võimalik. Ideaalis peaks pneumojaoti olema täiturisse sisseehitatud. Selle täiendav eelis oleks lihtsam ja kiirem paigaldus ning see, et kulub vähem ühenduskomponente.
Juhtahela töökindel toimimine on tugevas sõltuvuses lõpulülititena kasutatavate pneumojaotite õige paigaldusega Nende paigaldamisel tuleb silmas pidada edaspidise seadistamise võimalikkust ja lihtsust, et tagada nende õigeaegne lülitumine olenevalt silindri liikumisest. [31]
4.1.9. Elektromagnetiga juhitavad pneumojaotid (Elektromagnetid ja nende kommuteerimine)
Pneumojaotites kasutatakse vahetut juhtimist ja võimendusega juhtimist. Võimendusega juhtimise korral juhitakse solenoidi kaudu abijaotit, mille kaudu omakorda toimub pneumojaoti juhtimine (Joonis 4.15)

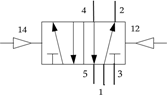
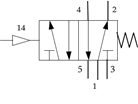
Joonis 4.15. Võimendusega 5/2 elektriliselt juhitav monostabiilne pneumojaoti [31]
Kahe sisendiga ilma tagastusvedruta pneumojaoti nimetatakse impulssjaotiks ehk bistabiilseks pneumojaotiks. (Joonis 4.16)
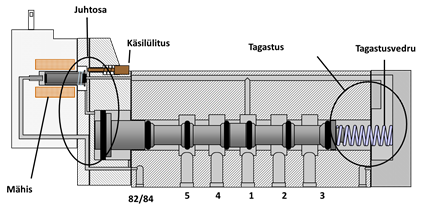
Kui aktiveerida elektromagnet Y1, siis käiguventiili südamik muudab oma positsiooni ja avaneb käiguventiili õhukanal 1.4. Selle käiguventiili südamik jääb sellisesse asendisse seni, kuni antakse juhtsignaal elektromagnetile Y2. Ainult siis lülitub käiguventiil ümber ja avaneb õhukanal 1.2.
Tagastusvedru puudumise tõttu on sellel ventiilil tekkinud uued omadused:
- Jaoti ümberlülitamiseks piisab lühiajalisest signaalist – impulsist
- Kuna südamik jääb peale ümberlülitamist muutumatusse asendisse, siis võib rääkida, et sellel elemendil on viimase signaali mälu
- Juhtsignaali olemasolul mõlemalt poolt pneumojaoti südamik ei muuda oma asendit.
Joonis 4.16. Elektromagnetiga bistabiilse impulssjaoti ehitus ja sümbol [31]
Seadme juhtimisel tekib mõnikord ebasoovitav situatsioon kui impulssjaotile mõjuvad korraga kaks signaali vastusuunas. Sellisel juhul pneumojaoti ei soorita nõutavat ümberlülitamist. Ebasoovitavat juhtsignaali nimetatakse vastusignaaliks. Tema kõrvaldamiseks kasutatakse erinevaid lahendusi.
Pneumaatilised täiturid (silindrid, mootorid)
Pneumaatilises täituris toimub pneumaatilise energia muundamine ja edastamine valmistustööks kasutatava masina mehhaanilise liikumise energiaks (füüsikaliseks tööks), mille tulemusena võib muutuda valmiva toote ja valmistusseadmete sisu või vorm. Pneumaatilised täiturid jagunevad linear- ja pöördliikumisega täituriteks. (Joonis 4.17)
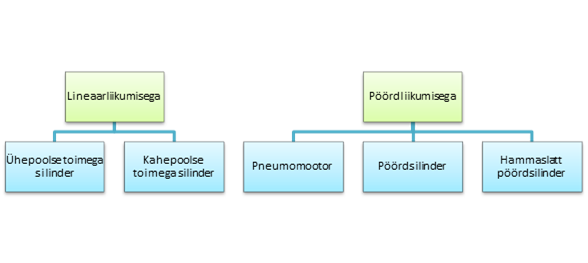
Joonis 4.17. Pneumaatiliste täiturite liigitus.
Lineaarliikumisega pneumotäiturid
Lineaarliikumisega täiturid (pneumosilindrid) Kasutatakse lineaarliikumise saamiseks mehaanilistes süsteemides.
Ühepoolse toimega silinder
Ühepoolse toimega silindri puhul juhitakse suruõhku ainult ühele poole kolbi. Sellised silindrid on kasutusel juhtudel, kui on tarvis sooritada tööliikumist ainult ühes suunas. Kolvi tagasiliikumine toimub silindrisse sisseehitatud vedru mõjul. (Joonis 4.18)
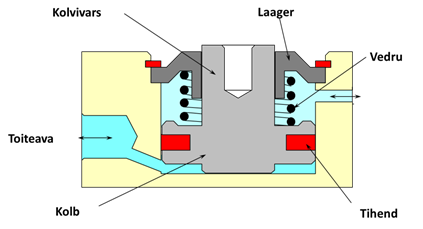
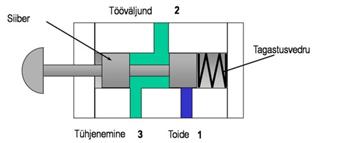
Joonis 4.18. Ühepoolse silindri tööpõhimõte ja tingmärk.
Tagastusvedru jõud on arvestatud selliselt, et tagada piisavalt kiire kolvi tagasiliikumine. Ühepoolse toimega silindritel on kolvi liikumisulatus piiratud tagastusvedru pikkusega ja ei ole üldjuhul suurem kui 100 mm. Seda tüüpi silindreid kasutatakse lukustamiseks, kinnitamiseks, kokkusurumiseks, tõukamiseks, tõstmiseks, detailide etteandmiseks, jne.
Kasutusel on kahte tüüpi ühepoolse toimega silindreid:
tööliikumine toimub suruõhu mõjul, kolvi tagasiviimine lähteasendisse toimub aga vedru mõjul
tööliikumine toimub vedru mõjul, kolvi tagasiviimine lähteasendisse toimub aga suruõhu mõjul Selliseid silindreid kasutatakse siis, kui on olemas suruõhu kadumise oht (autode- ja rongide suruõhuga töötavad pidurid).
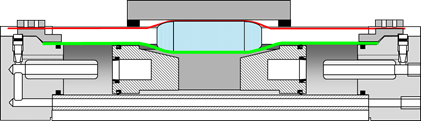
Ühepoolse toimega silindrite konstruktsiooniline eritüüp on membraansilindrid. Membraansilindrites asendab kolbi kas kummi-, plastik- või terasmembraan. Kolvivars on kinnitatud membraani keskele. Sellistes silindrites puudub hõõrdejõud, tekib ainult membraani deformatsioonist tekkiv elastsusjõud
Kahepoolse toimega silindrid
Kolvi liikumine silindris toimub suruõhuga mõlemas suunas, nii miinus- kui ka plusssuunas. Kahepoolse toimega silindrid on kasutusel juhul kui on vajalik sooritada kasulikku tööd mõlemas suunas. Kolvi liikumisulatus on kahetoimelisel silindril praktiliselt piiramatu, kuid see peab olema selline, et silinder säilitaks jäikuse (Joonis 4.19).
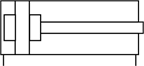
Joonis 4.19. Kahepoolse silindri tööpõhimõte tingmärk. [31]
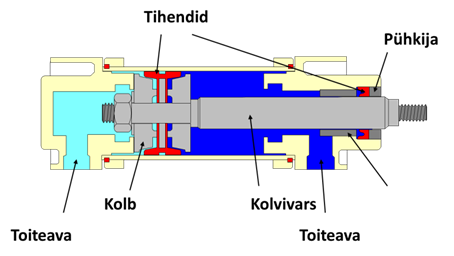
Silindri amortisaatorid
Kui silindrit kasutatakse suurte masside liigutamiseks, siis kasutatakse löökide ja purunemiste vältimiseks silindrisse sisseehitatud amortisaatoreid. Kui kolb on jõudnud piirasendi lähedale, sulgeb amortisaatori kolb väljavoolavale õhule otseväljavoolu ning õhk pääseb välja läbi drosseli. Seetõttu liigub kolb piirasendisse aeglustusega. Enamikel juhtudel on aeglustus reguleeritav. Silindri teisesuunalisel liikumisel pääseb õhk kolvi taha otse läbi möödavooluklapi (Joonis 4.20; )
Joonis 4.20. Kahepoolse toimega amortisaatoritega silindri tööpõhimõte tingmärk.

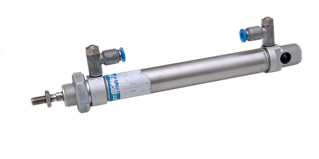
Joonis 4.21. Kahepoolse toimega silinder.
Kolvivarreta silindrid
Traditsiooniline kahepoolse toimega silinder vajab ruumi korpuse jaoks ja pluss ruumi töökäiguks (Joonis 4.22).

Ruumi on võimalik efektiivsemalt ära kasutada kolvivarreta silindriga

Kasutusel on kolvivarreta silindrid, kus kolb ja liugur on omavahel mehaaniliselt seotud, silindri ja kolvi vaheline tihendamine toimub erikonstruktsiooniga tihendi abil
Joonis 4.22. Kolvivarreta silindri tööpõhimõte. [31]
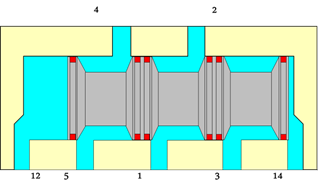
Kolvivarreta silindri ehitus
Joonis 4.23. Kolvivarreta silindri ehitus.
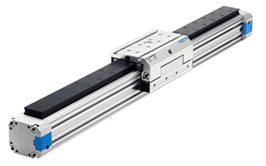
Joonis 4.24. Juhikutega kolvivarreta silinder.
Kolvivarreta silinder
Läbimõõt 8 mm ... 80 mm
Käigupikkus 100 mm ... 3000 mm
Jõud 3,000 N
Magnetilise ülekandega silinder
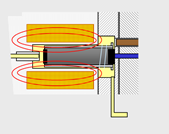
Kolvivarreta silindrites kasutatakse kolvi ja tööorgani sidumiseks ka magnetvälja, mis tekitatakse kasutades püsimagneteid (Joonis 4.25; Joonis 4.26)
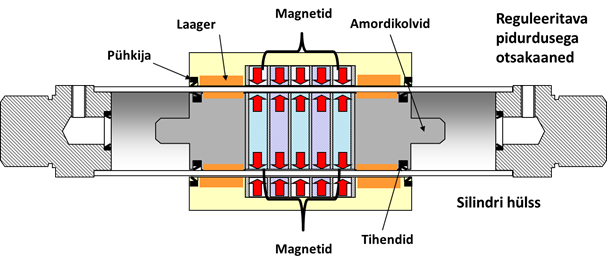
Joonis 4.25. Magnetilise ülekandega silindri ehitus.

Joonis 4.26. Magnetilise ülekandega silinder.
Neid silindreid kasutatakse juhtudel, kui vajatakse konstruktsiooni väikesi mõõtmeid nt. uste avamismehhanismides Kolvivarreta silindrid võimaldavad realiseerida pikki liikumisi, säästes samaaegselt ruumi.
Magnetilise ülekandega silindrid
Läbimõõt 12 mm ... 40 mm
Käigupikkus 10 mm ... 4000 mm
Jõud 750N, magneti hoidejõud kuni 1050N
Pöördliikumisega täiturid
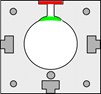
Pöördsilindrid
Labaga pöördsilindris asendab kolbi laba, mille pöörlemissuund sõltub sellest, kummale poole laba suruõhku juhitakse. Standardsed pöördenurgad on 45°, 90°, 180°, 270°. Pöördenurka saab reguleerida ka reguleerimiskruvide abil (Joonis 4.27Joonis 4.28.)

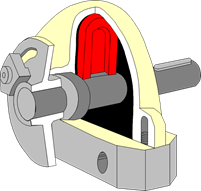
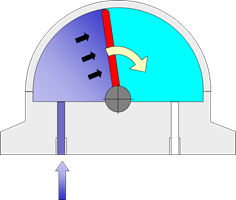
Joonis 4.27. Pöördsilindri ehitus.
Jõud kantakse üle pöördemomendina.
Moment = Jõud x Õlg
Ühikuks njuutonmeeter - Nm

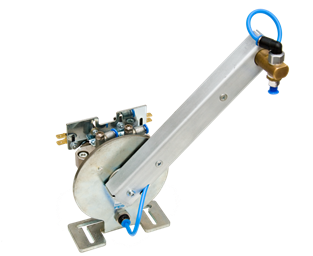
Joonis 4.28. Pöördsilinder.
Ekvivalentläbimõõt 6 mm ... 40 mm
Pöördenurk 0 ... 270o
Pöördemoment ... 20 Nm
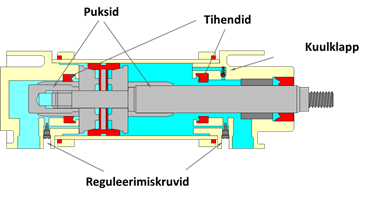
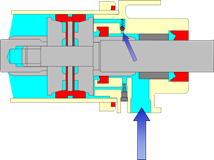
Hammaslatt konstruktsiooniga pöördsilinder
Antud kahepoolse toimega silindri kasutatakse pöörleva liikumise saamiseks hammaslatte. Standardsed pöördenurgad on 45°, 90°, 180°, 270°, 720°. Pöördenurka saab reguleerida ka reguleerimiskruvide abil (Joonis 4.29Joonis 4.30).
Silindri pöördemoment sõltub kasutatavast töörõhust, kolvi pindalast ja ülekandesuhtest.
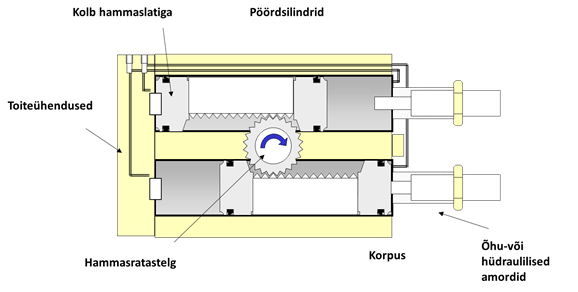
Joonis 4.29. Hammaslatt pöördsilindri ehitus [31]
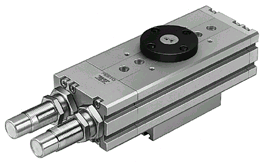
Joonis 4.30. Hammaslatt pöördsilinder.
Läbimõõt 6mm ... 50mm
Pöördenurk 0 ...720o
Pöördemoment ...78Nm
Pneumosilindrite karakteristikud jõudude määramine
Pneumosilindri poolt arendatav jõud sõltub töörõhust, kolvi läbimõõdust ja tihendite poolt põhjustatud hõõrdejõust.
Pneumosilindri poolt arendatava teoreetilise jõu suuruse saab leida kasutades valemit:
Fth = A • p
Fth - silindri poolt arendatav teoreetiline jõud (N)
A - kolvi pindala (m2)
p - kasutatav töörõhk (Pa)
Praktikas arvestatakse silindri poolt arendatavat tegelikku jõudu, mille leidmisel võetakse arvesse ka hõõrdejõudu. Normaaltingimustes (töörõhk 400-800 kPa) arvestatakse hõõrdejõu väärtuseks ligikaudu 3-20% silindri poolt arendatavast teoreetilisest jõust.
Ühepoolse toimega silindri tegelik arendatav jõud:
Feff = (A • p) - (FR + FF)
Kahepoolse toimega silindri tegelik arendatav jõud kolvivarre väljaliikumisel (plusssuunalisel liikumisel):
Feff = (A • p) - FR
Kolvivarre sisseliikumisel (miinussuunalisel liikumisel):
Feff = (A' • p) - FR
Feff - silindri poolt arendatav jõud (N)
A - kolvi pindala π×D2/4 (m2)
![]() A' -
kolvi kolvivarrepoolne pindala (D2-d2)×π/4 (m2)
A' -
kolvi kolvivarrepoolne pindala (D2-d2)×π/4 (m2)
.p - töörõhk (Pa)
FR - hõõrdejõud 3-20% Fth (N)
FF - vedru jõud (N)
D - kolvi läbimõõt (m)
D - kolvivarre läbimõõt (m)
Kolvi poolt arendatava jõu leidmiseks on sobilik kasutada ka nomogrammi (Joonis 4.31).
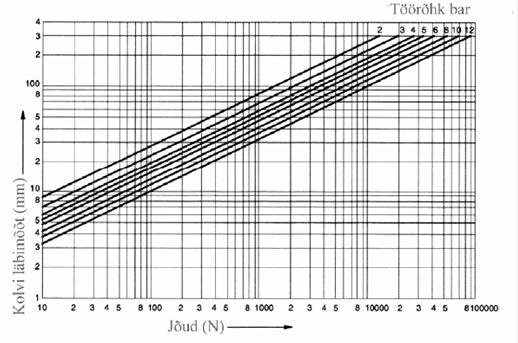
Joonis 4.31. Kolvi poolt arendatava jõu leidmine.
4.1.13. Suruõhumootorid
Erinevalt pöördsilindritest ei ole suruõhumootoritel pöördenurga piirangut. Oma konstruktsioonilt jaotatakse suruõhumootorid järgnevalt:
- kolbmootorid,
- tiivikmootorid,
- hammasratasmootorid,
- turbiinid.
Kolbmootorid
Kolbmootoreid jaotatakse radiaal- ja aksiaalkolbmootoriteks. Suruõhuga pannakse liikuma kolvid, millede liikumine muudetakse ülekandemehhanismi abil pöörlevaks liikumiseks. Mootori sujuva töö tagamiseks kasutatakse mitut pneumosilindrit. Selliste mootorite parameetrid on otseses sõltuvuses töörõhust, silindrite arvust, kolvi pindalast jne. Sellist tüüpi suruõhumootorid on kas päripäeva või vastupäeva pöörlemisega. Maksimaalne pöörlemissagedus ulatub kuni 5000min-1 ja võimsus nominaalkoormusel kuni l,5-19kW. (Joonis 4.32)
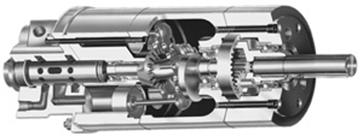
Joonis 4.32. Aksiaalkolbmootorid.
Tiivikmootorid
Tiivikmootorid on oma ehituselt lihtsa konstruktsiooniga ja kerge kaaluga. Seetõttu on nad leidnud laialdast kasutamist. Oma tööpõhimõttelt on nad sarnased tiivikkompressorile ja on kergesti reverseeritavad. Nende mootorite pöörlemissagedus on 3000-5000min-1 ja arendatav võimsus on 0,1-17kW (Joonis 4.33.)
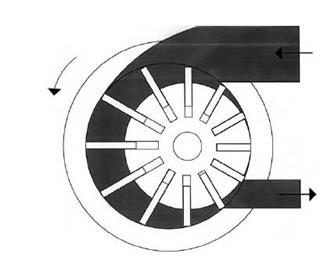
Joonis 4.33. Tiivikmootor.
Hammasratasmootorid
Seda tüüpi mootorites tekitatakse pöördemoment suruõhu suunamisel vastu hammasratta hambaid Teine hammasratas on kinnitatud mootori teljele. Selliste mootorite maksimaalvõimsus on kuni 44kW, pöörlemissuund on reverseeritav.
Turbiinmootorid
Turbiinmootoreid saab kasutada väikestel võimsustel, kuid nende pöörlemissagedus on suur (näiteks hambapuuridel kuni 500000 p/min-1).
Suruõhumootorite omadused:
- pöörlemissageduse ja pöördemomendi sujuv reguleerimine,
- väikesed mõõtmed,
- ole tundlikud ülekoormusele,
- võimalik kasutada tolmustes, niisketes tingimustes, samuti laias
- emperatuuride vahemikus,
- ei ole plahvatusohtlikud,
- uur pöörlemissageduse diapasoon,
- ihtne hooldus,
- ihtne pöörlemissuuna muutmine
