
TÄITURID - TÖÖSTUSROBOTID
Tööstusroboti mõiste
Standardi EN 775 järgi defineeritakse tööstuslikku robotit (Industrial robot) kui automaatselt juhitavat, ümberprogrammeeritavat, multifunktsionaalset, mitme vabadusastmega manipulaatorit sisaldavad masinat, mis on kas paikselt või mobiilselt installeeritud automatiseeritud tootmissüsteemidesse. Lihtsamalt öeldes on tööstusrobotid eesmärgipäraseks liikumiseks mõeldud masinad, mida kasutatakse tootmise automatiseerimises [22].
Tänapäeva tööstusroboteid iseloomustavad [22]
- programmeeritavus erinevates keeltes ning keskkondades,
- võimalus määratleda positsioone, koordinaatsüsteeme, liikumistrajektoori parameetreid ning korrata tegevust suure täpsusega,
- tööstuskontrollerite võime kontrollida sisendeid ning väljundeid, töödelda informatsiooni, teostada andmesidet teiste seadmetega läbi erinevate andmesidekanalite, koordineerida robotite liikumist teiste seadmetega ning olla integreeritud arvuti- ning tööstussüsteemidesse
Tabel 5.1. Tänapäeva tööstusrobotite tähtsamad tehnilised näitajad [22]
Näitaja |
Arvväärtus |
|---|---|
Vabadusastmete arv |
3-7 |
Kiirus [m/s] |
≤ 20 (keskmine 1-5) |
Korratavuse täpsus [mm] |
0,005...2 |
Tõstekaal [kg] |
1...1000 |
Resolutsioon [mm] |
0,001...0,5 |
Kiirendus [m/s2] |
≤ 10g (keskmine: 3-4g) |
Keskmine eluiga [a] |
12 |
Robotitehnika on tänapäeval väga kiiresti arenev teadusharu, mis hõlmab endas nii mehhatroonikat, infotehnoloogiat ning elektroonikat. Oma suure tööviljakuse ja kvaliteedi poolest ületavad nad inimeste võimeid, mistõttu rakendatakse neid tänapäeva tootmisliinides aina sagedamini.
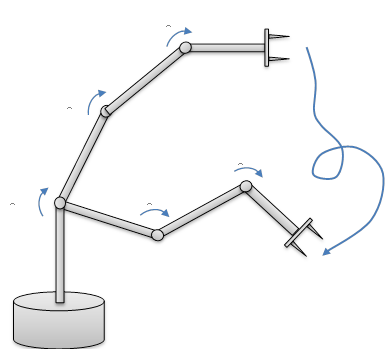
Tööstusrobot koosneb erinevatest telgedest, mille ümber robot võib pöörelda, ja neid telgi ühendavatest lülidest (vt. Joonis 5.1). Roboti lüli paneb liikuma mõni täiturmehhanism, tänapäeval on selleks elektrimootorid: kas sammmootorid, harjadeta alalisvoolumootorid, või püsimagnetergutusega sünkroonmootorid. Iga mootor on samuti varustatud mõne seisupiduriga nt elektromagnetilise piduriga, mis rakendub sel juhul, kui mootoritel kaob toide. Tavaliselt +24 V pinge rakendamisel pidur vabastatakse. Liigend võib olla kas pöörlev ehk rotatiivne või sirjooneline ehk translatoorne. Iga lüli tööpiirkond on piiratud kas mehaaniliste pidurite abil või siis tarkvaraliselt. See on vajalik, et robot ei keeraks oma liigendeid tööalast välja. Mootori pöördemomendi vähendamiseks kasutatakse mehaanilisi ülekandeid, mis võimaldavad valida täituriteks väiksemaid mootoreid.
Tööstusrobotid on varustatud paljude anduritega, mis aitavad neil teostada töid eeskätt ohutult ja täpselt. Tööstusrobot suudab tuvastada kokkupõrget mõne takistusega ning sellele koheselt reageerida, tuvastab ülekiirust või tegeliku positsiooni lahknevust soovitud positsioonist, tunneb ära valesti ette antud parameetreid, katkestab roboti liikumise ohutusahela avanemisel ja palju muud. Lisaks sisseehitatud kaitsefunktsioonidele on võimalik robotsüsteem varustada ka muude kaitseanduritega näiteks tuvastusanduriga, mis tuvastades inimese kohalolu edastab robotile info töö katkestamiseks.
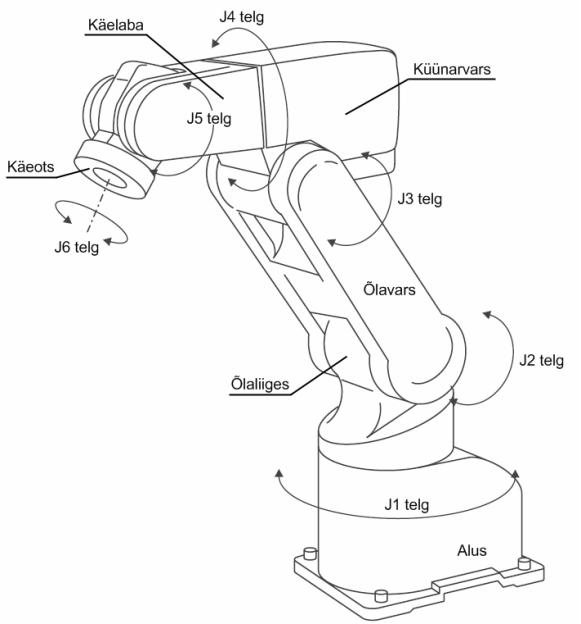
Joonis 5.1. MELFA RV–1A roboti manipulaator [22]
Robotsüsteem
Robot ei saa kunagi töötada üksinda. Tehnoloogilise operatsiooni teostamiseks on peale robotite vaja veel tehnoloogilisi masinaid ja abiseadmeid. Töödeldav detail tuleb robotile ette anda, edastada info töö alustamiseks ning reageerida protsessi tagasisidele. Seega tuleb igat tootmisüksust vaadelda eraldi robotsüsteemina. Robotsüsteemiks (robot system) nimetatakse automaatselt toimivat tootmismoodulit, mis koosneb omakorda ühest või mitmest manipulaatorist, tehnoloogilisest- ja/ või transpordimasinast ja töödeldavate detailide hoidmiseks ette nähtud kassetist või alusest [22].
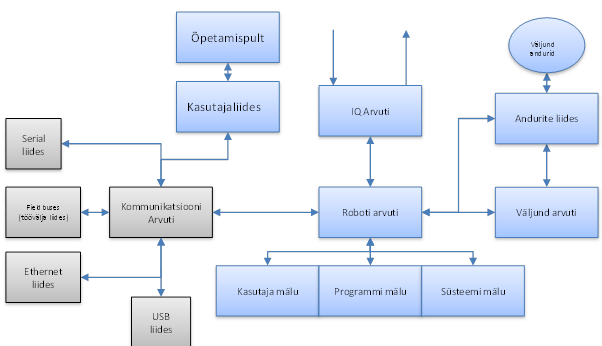
Robotsüsteemi plokkskeem on näidatud ning üksikosade kirjeldused järgmistes alapunktides.
|
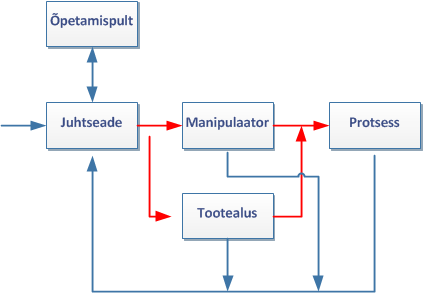
Joonis 5.2. Robotsüsteemi ülesehitus
Juhtseade
Juhtseade (controller) on robotsüsteemi osa, mis juhib manipulaatorit ja teisi seadmeid, töötleb erinevatelt anduritelt saadavaid tagasisidesignaale süsteemi oleku kohta ning vahetab andmeid kasutajate ning teiste robotsüsteemidega läbi erinevate andmesideliideste. Juhtseade juhib korraga nii manipulaatorit kui ka tootealust vastavalt programmile ning võib töötada sünkroonselt ka teiste juhtseadmetega. Juhtseade koosneb juhtimis- ja jõuahelatest. Robotsüsteemi juhtimiseks kasutatav juhtseadme funktsioonid on tunduvalt laiemad kui näiteks programmeritavatel kontrolleritel. Firma ABB juhtimisseade IRC5 on näidatud (Joonis 5.3).
|

Joonis 5.3. Firma ABB juhtseade IRC5
Õpetamispult
Õpetamispult (Teachpendant) on käes hoitav ja kontrolleriga ühenduses olev seade manipulaatori käsitsijuhtimiseks, positsioonimispunktide õpetamiseks, juhtprogrammi kirjutamiseks, programmi testimiseks ning sätete muutmiseks. Õpetamispult on vajalik ka sidustalitluses programmeerimiseks personaalarvutiga. Seega toimub kasutaja ja juhtseadme vaheline kommunikatsioon läbi õpetamispuldi, mille kaudu antakse sisse manipulaatori juhtimiseks vajalikud sisendsuurused.
Joonis 5.4. Õpetamispult |
Manipulaator
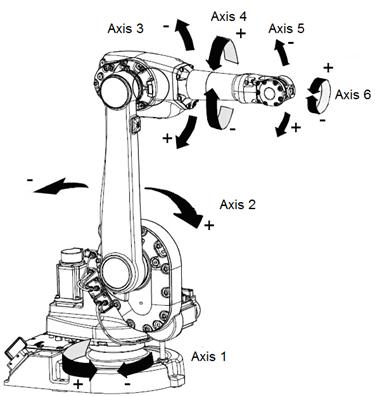
Manipulaator (manipulator) on mitmelülilisest mehhanismist, mootoritest ja ülekandemehhanismidest koosnev agregaat. Manipulaator on võimeline pöörama ennast ruumis ümber mitmete telgede ning võtta sisse erinevaid asendeid. Mida rohkem on robotil neid telgi (vabadusastmeid), seda paindlikum ta on. Igat telge paneb liikuma elektrimootor või mõni muu täiturmehhanism, mida juhitakse juhtseadmega. Iga vabadusaste on varustatud lisaks mootorile ka mehaanilise ülekandemehhanismiga ning tagasisideanduriga, mida on vaja roboti juhtimiseks. Manipulaatori käelaba külge kinnitatakse tööriist.
Joonis 5.5. Mõned tööstusrobotite näited |

Tootealus
Tootealus või positsioneer on robotsüsteemi osa, mis asetab töödeldava detaili manipulaatorile vajalikku asendisse. Positsioneeri pöörlemistelg võib olla robotsüsteemi üheks vabadusastmeks, mida juhitakse juhtseadmega samuti nagu manipulaatori liigendeidki. Tootealust võib juhtida ka mõni teine juhtseade. Sellisel juhul tuleb kahe juhtseadme tööd omavahel sünkroniseerida. (Joonis 5.6)

Joonis 5.6. Firma ABB positsioneer IRBP 250 D |
Tööstusrobotite juhtimine
Kui mootori juhtimine kujutas endast mootori pöörlemiskiiruse ja -suuna reguleerimist, elektriliste täiturite juhtimine aga nende sisse ja väljalülitamist, siis tööstusrobotite juhtimine on palju keerukam. Tööstusrobotite juhtimine toimub kolmemõõtmelises ruumis arvestades samuti ka tööriista orienteerumisega ümber mitme telje. Selle tarvis peab juhtseade üheaegselt juhtima mitut mootorit. Tööstusrobot liigub eelnevalt programmeeritud trajektoori mööda, mille jaoks peab juhtseade eelnevalt trajektoori välja arvutama, sellele vastavalt mootoreid juhtima ning pidevalt kontrollima roboti trajektoori jälgimist. Kui roboti telgedelt saadud tagasisideanduritelt saadud väärtused ei lange kokku juhtseadme poolt väljaarvutatud väärtustega, peatatakse roboti töö.
Robot liigub alati ühest punktist teise. Kahe punkti vaheline liikumine võib olla kas rangelt sirgjooneline või kõverjooneline. Selleks, et jõuda ühest punktist teise, peab juhtseade punktide koordinaate teades välja arvutama vajaliku trajektoori. Trajektoori väljaarvutamisel määratakse ka iga mootori pöörlemiskiirus, et kõik lülid jõuaksid lõpppunkti üheaegselt. Üks võimalik trajektoor ühest punktist teise on näidatud Joonis 5.7, kus kolme liigendiga robot teostab ebakorrapärast kõverliikumist kahe punkti vahel.
Joonis 5.7. Tööstusroboti liikumine trajektoori mööda [22]
Selleks, et tagada roboti sujuv ja täpne liikumine, kasutatakse robotite telgedel absoluut-tagasisideandureid (resolver, absoluutenkooder), mis edastavad juhtseadmele roboti positsiooni, liikumiskiiruse, kiirenduse ja pöörlemissuuna. Ühe roboti juhtimisseadme plokkskeem on toodud Joonis 5.8.
Joonis 5.8. Roboti juhtimissüsteem [22]
Tööstusrobotitel kasutatavad tööriistad
Tööstusrobotid on alati varustatud mõne tööriistaga, mida nad kasutavad ette nähtud töö teostamiseks. Näiteks haaratsiga robot võib teostada teisaldustöid või detaili hoidmis- ja et teandmistöid. Keevituspüstoliga varustatud robot teostab keevitustöid. Tööriistu on väga palju ning nad on projekteeritavad ka erinevate tööde jaoks nt erineva kujuga detailide haaramiseks ei pruugi standardlahenduses olev haarats üldse sobida. Enimlevinud tööriistad on pneumaatiline/elektriline haarats, puur-, frees-, keevitus- või värvimisseade.
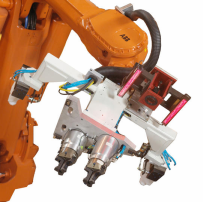
a |
b |
c |
d |
Joonis 5.9. Erinevad roboti tööriistad: a – keevituspüstol, b – kahe pneumaatilise haaratsiga ja videokaameraga multitööriist, c – iminappadega haarats, d – vahetatavate freesipeadega tööriist |
|



Tööstusrobotite rakendamine tootmise automatiseerimisel
Tänapäeval on tööstuses suurimaks väljakutseks saavutada kõrge kvaliteet võimalikult madala hinnaga, mistõttu saritootmisega tegelev ettevõtte pole konkurentsivõimeline ilma roboteid kasutamata. Neid kasutatakse selliste tööde teostamiseks tööstuses, mis on inimestele rasked või ohtlikud, nõuavad suurt teostamise täpsust või on inimeste jaoks liiga üksluised. Kõige levinuimaks töödeks on kaar- ja punktkeevitus, värvimine, pakendamine, metallivalu, koostamine, konveieri teenindamine, liimimine ja muud detailitöötlemistööd.
Tööstusroboteid kasutatakse kõige enam keevitustöödes, eriti kaarkeevituses ja punkt-keevitustöödes. Robotkeevitust on kõige enam kasutatud autotööstuses autokerede keevitamisel. Aga lisaks sellele kasutatakse neid nt veemahutite, ukseraamide jm keevitamiseks. Robot, erinevalt inimesest, ei karda inimesele ohtlikke heitgaase, keevituskaare eredust ega keevitusel tekkivaid pritsmeid. Lisaks sellele teostab robot keevitustöid kiiremini ja kvaliteetsemalt kui seda teeb inimene. Kui inimene keevitab, siis läheb keevitamiseks 20-30 % ajast, ülejäänud osa ajast moodustab isikukaitsevahendite (kinnaste, kiivri jm) sättimine.
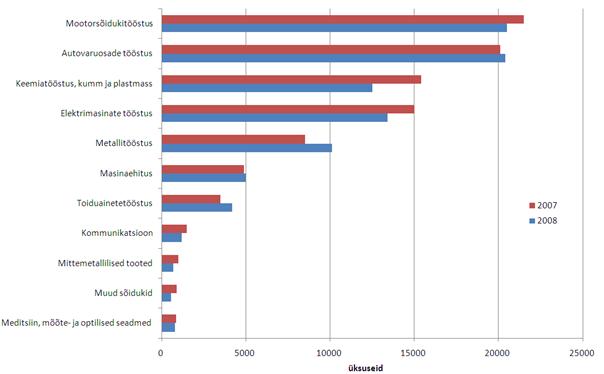
Joonis 5.10. Tööstusrobotite kasutamine maailmas tööstusharude kaupa
Tööstusrobotite klassifikatsioon
Erinevad tööd nõuavad erinevaid tüüpi roboteid, mis erinevad konsktruktsiooni, juhtimise, võimsuse ja muude tehniliste näitajate poolest. Näiteks, et teostada 3 mõõtmelist liikumist nõudvat tööd on mõttekas kasutada kolme vabadusastmega robotit. Juhul kui kasutatakse suurema vabaduastmete arvuga robotit, ei kasutata tema ressurssi optimaalselt ära. Iga vabadusaste tähendab uue liigendi lisamist robotile, mis koosneb mootorist, mehaanilisest ülekandest, tagasisideanduritest ja vajalikest kaablitest. See aga omakorda tõstab roboti hinda ja ekspluatatsioonikulusid.
Tööstusroboteid võib liigitada manipulaatori ehituse järgi, ajamite järgi, juhtimispõhimõtte järgi, tehnoloogilise tegevuse järgi. Tööstusrobotite liigitust manipulaatori ehituse järgi iseloomustab Tabel 5.2.
Tabel 5.2. Manipulaatorite liigitus manipulaatori ehituse järgi
Roboti tüüp |
Kinemaatiline struktuur |
Tööala |
Illustreeriv näide |
|
|
|
|
Karteesianrobot |
|||
|
|
|
|
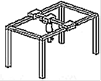
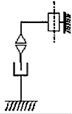
Silinderrobot |
|||
|
|
|
|
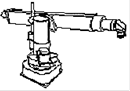
Sfääriline robot |
|||
|
|
|
|
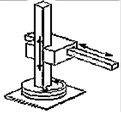
SCARA robot |
|||
|
|
|
|
Liigendrobot |
|||
|
|
|
|
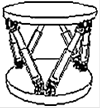
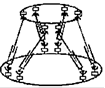
Paralleelrobot |


















Tööstusrobotite rakendamine
Järgnevalt on toodud kahe tööstusliku protsessi kirjeldused: alumiiniumvelgede koostamine ja metallivalu, mis peaksid lühidalt kirjeldama tööstusroboti rakendamist tootmisliini ja tema funktsioone seal.
Autode alumiiniumvelgede lihvimine
Süsteem koosneb ühest tööstusrobotist, mis haarab konveierilt tulevat alumiiniumvelge. Spetsiaalse lasermõõteriistadega asetab robot velje fikseeritud asendisse. Seejärel pannakse tööle statsionaarselt paiknevad lihvimismasinad, millega eemaldatakse velje valul tekkinud ebatasasused. Tööstusrobot keerab hoitavat velge lihvimismasinatele vastavalt ette. Pärast töö lõpetamist asetab robot velje tagasi konveierile ning haarab järgmise. Kogu süsteem asub kaitsva tõkke taga.
Süsteemi eeliseks on pidev ja katkematu tootmine, hea kvaliteet roboti suure täpsuse tõttu, väike seadmete kulumine.
Metalli kastmine
Järgnev süsteem kujutab endast metallikastmise (die casting) protsessi. Metallivalu on kõigist teistest protsessidest kõige mustem ja robotit kahjustav, kuna töökeskkond on tavaliselt must ning tekkivad pritsmed tekitavad kahju, kui sattuvad roboti liikuvate osade vahele (mootorite tihendid). Antud juhul haarab tööstusrobot detaili nöörkonveierilt. Haaramiseks on kasutatud pneumaatilist haaratsit ning täpseks positsioneerimiseks kaameraga jälgimissüsteemi. Õigesti positsioneerides kastab robot detaili spetsiaalsesse sulametalliga (nt Zn) vanni, hoiab seda vastavalt ning tõstab välja. Seejärel riputab kastetud detaili tagasi nöörkonveierile.
Süsteemi eelisteks on hea töö kvaliteet ja katkematu tootmine. Roboti kasutamine võimaldab vältida inimese osavõttu antud protsessist, mis toimub inimese jaoks kahjulikus keskkonnas.
