
TÄITURID - ELEKTROMEHAANILISED TÄITURID
Elektrimootorite ehitus
Elektrimootorid on elektromehaanilised täiturmehhanismid, mis muundavad elektrienergiat mehaaniliseks energiaks, et panna sellega liikuma töömasinat. Elektrimootorid on tänapäeval kõige levinumad elektromehaanilised täiturmehhanismid.
Elektrimootorid koosnevad paigalseisvast staatorist ja pöörlevast rootorist. Staatoris tekitatakse pöörlev magnetväli, mis on vajalik rootori pöörlema panemiseks. Rootor pöörleb laagritele toetuval võllil, mille külge on omakorda ühendatud mehhanism. Staatori ja rootori vahel eksisteerib õhupilu, mille kaudu toimub magnetvälja penetratsioon staatorist rootorisse. Elektrimootori ehitust iseloomustab Joonis 2.5
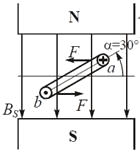
Mootori pöörlemiseks on vajalik tekitada pöördemoment. Pöördemomendi tekitamiseks on vaja vooluga juhti ja magnetvälja. Kui asetada magnetvälja raam ning lasta sellest läbi elektrivool (vt. Joonis 2.5, a), siis mõjub raamile jõud F, mis paneb raami pöörlema ümber laagritele asetatud telje (vt. Joonis 2.5, b). Pöördemomendiks nimetatakse jõu F ning jõuõla D korrutist ning arvutatakse
![]()
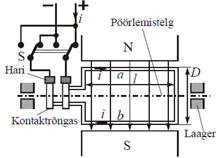
a
b
Elektrimootoreid võib sõltuvalt toitepinge tüübist jagada kolmeks grupiks:
- alalisvoolumootorid,
- vahelduvvoolumootorid,
- impulsstoitega mootorid.
Alalisvoolumootorid
Alalisvoolumootorid (direct current motors, dc motors) koosnevad õhupiluga üksteisest eraldatud staatorist ja rootorist. Staatoril paiknevad magnetvälja poolused, milles tekitatakse magnetväli. Pöörlevat osa nimetatakse ankruks, mis koosneb mitmetest mähistest. Alalisvoolumootorites kasutatakse magnetvälja tekitamiseks staatoril paiknevat ergutusmähist või püsimagneteid. Kontaktrõngaste ja harjakeste abil juhitakse pöörlevasse raami alalisvool (vt. Joonis 2.5). Et rootor pöörleks püsivalt ühes suunas, tuleb ankruvoolu suunda iga poolperioodi tagant reverseerida. Ankruvoolu suuna muutmiseks kasutatakse alalisvoolumootorites mehaanilist või pooljuhtidega töötavat kommutaatorit.
Sõltuvalt ergutusmähise asukohast võivad alalisvoolumootorid olla kas a) võõrergutusega, kus ergutusmähist toidetakse eraldi toiteahelast, b) jadaergutusega, kus ergutusmähis on ühendatud jadamisi ankruga, c) rööpergutusega, kus ergutusmähis on ühendatud paralleelselt ankruga, või siis kombineeritult jada -ja rööpergutusega. Lisaks sellele kasutatakse kas püsimagnetergutust, mille puhul staatoril paiknevate püsimagnetitega tekitatakse ajas muutumatu magnetväli [21].
Alalisvoolumootorite stabiilsel režiimil kehtib võrrand
![]()
kus U on mootori klemmidele rakendatud toitepinge, E on ankrus tekitatud vastu-elektromotoorjõud ning IaRa on pingelang ankrumähistes. Alalisvoolumootoris kehtib kiiruse n, magnetvoo Φ ja rakendatud pinge U võrdeline seos.
![]()
pöördemomendi M, elektrivoolu I ja magnetvoo Φ vahel kehtib
![]()
Siit järeldub, et mootori pöörlemiskiirust saab tõsta pinge suurendamisega või magnetvoo vähendamisega (ergutusmähise toitepinge vähendamisega). Pöördemomenti saab suurendada kas ankruvoolu või magnetvoo suurendamisega. Siit järeldub, et magnetvoo tugevuse reguleerimine mõjutab korraga kiirust ja momenti pöördvõrdeliselt. Alalisvoolumootorite käivitamine toimub käivitusvoolu piiramiseks läbi ankruga jadamisi ühendatud takisti. Mootori kiiruse kasvades tuleb käivitustakisti väärtust vähendada.
Nad olid varem laialdaselt kasutusel reguleeritava kiirusega ajamitena. Vaatamata heale kasutegurile, mis on tavaliselt üle 90 %, kasutatakse neid tänapäeval järjest harvemini, kuna mikroprotsessortehnika ja jõuelektroonika areng võimaldab palju efektiivsemalt juhtida vahelduvvoolumootoreid, mis lisaks heale juhitavusele vajavad vähem hooldust ning on odavamad. Lisaks sellele pole alalisvoolumootorid kasutatavad keemiliselt agressiivses ja plahvatusohtlikus keskkonnas, mõnedes kohtades lausa keelatud. Kui on kasutatud harjadega mehaanilist kommutaatorit, on sädelemine nende vahel täiskoormusel vältimatu (2).
Vahelduvvoolumootorid
Vahelduvvoolumootorid jagunevad omakorda veel ühe- ja kolmefaasilisteks mootoriteks. Ühefaasilisi mootoreid kasutatakse laialdaselt tööriistades ja kodustes majapidamistes. Kolmefaasilised vahelduvvoolumootorid on rohkem levinud võimsates tööstuslikes seadmetes. Ühefaasiliste mootorite käivitamiseks tuleb kasutada pöörleva välja tekitamiseks käivitusahelat. Käesolevas konspektis keskendutakse kolmefaasilistele mootoritele.
Asünkroonmootor on madala hinna ja lihtsa ehituse pärast tööstuses kõige enam kasutatav mootor, milles staatoril tekkiv pöörlev magnetväli paneb rootori pöörlema. Asünkroonmootori tööpõhimõte, juhtimine ja kasutamine on käesoleva konspekti põhipunktideks.
Sünkroonmootori (samuti ka asünkroonmasina) staatorimähis tekitab pöörleva magnetvälja. Erinevalt asünkroonmootorist tekitatakse aga sünkroonmootori rootoris elektromagnet- või püsimagnetergutusega veel teine magnetvoog (ergutusvoog), mis magnetahela kaudu aheldub staatorimähise magnetvooga. Selle tulemusena haarab staatori pöörlev magnetväli rootori endaga kaasa (s.t staatorivälja N poolused tõmbuvad rootori S poolustega ja vastupidi) ning rootor hakkab pöörlema staatorivälja sünkroonkiirusel. Rootori ergutamiseks elektromagnetite abil tuleb ergutusvool juhtida pöörlevasse rootorisse läbi rootoril asuvate kontaktrõngaste. Püsimagnetite kasutamisel sellist vajadust pole [21].
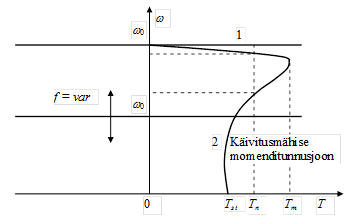
Sünkroonmootor arendab momenti ainult sünkroontalitluses. Seepärast on omaette probleemiks sünkroonmootori käivitamine otse võrkulülituse puhul, milleks kasutatakse asünkroonkäivitusmähist. Sünkroonmasina kiiruse reguleerimine toimub samuti nagu asünkroonmasina puhul toitepinge sageduse reguleerimine (vt. Joonis 2.7).
Püsimagnetitega sünkroonmootoritel ergutusmähis puudub ning ergutusvoog tekitatakse püsimagnetitega. Püsimagnetitega sünkroonmasina rootori ehitus on lihtne, mistõttu niisugune mootor on eriti töökindel muutuva kiirusega ajamites.
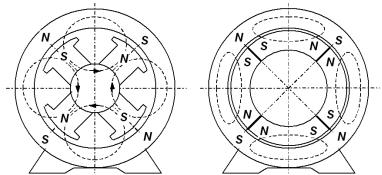
Reluktanstmootor (reluctance motor) on väljepoolustega sünkroonmasina vorm, milles puuduvad ergutusmähis ja püsimagnetid. Sellisel mootoril põhineb töö õhupilu magnetilise takistuse (ehk reluktantsi) muutumisel sõltuvalt rootori asendist.
Sünkroonmasinate põhilised kasutusalad on võimsad kompressorid, laeva veo- ja tüürimisajamid, veskid, pumbad, paberimasinad jm. Väikesevõimsuselisi püsimagnetergutusega masinaid kasutatakse tööpinkide ja robotite ajamites. Nad on võrreldes asünkroonmootoritega kallimad ning konstruktsioonilt keerulisemad [21].
Impulsstoitega mootorid
Sammmootorid erinevad sünkroonmootori selle poolest, et pöörlev magnetväli tekitatakse neis mitte kolmefaasisile siinuspingega, vaid järjestikuste impulsside jaotamisega masina mähistel. Samm-mootorid sobivad kasutamiseks väikese võimsusega positsioonjuhtimisega ajamites, mil mootorile antud impulsside arv on võrdeline rootori pöördenurga (ehk asendi) muutusega ning ajami positsioonimiseks pole vaja kasutada täiendavat asendiandurit. Sammu vähendamiseks ja positsioonimistäpsuse suurendamiseks valmistatakse samm-mootorid suure pooluste arvuga. Suurema võimsuse korral pole samm-mootorite kasutamine otstarbekas nende väikese kasuteguri tõttu [21].
Sammmootoriga elektriajam on kirjeldatud pikemalt peatükis 2.8.
Kaod elektrimootorites
Igas mehhanismis sh elektrimasinas tekkib paratamatult erinevaid kadusid. Kaod võivad tekkida järgmistel juhtudel [21]:
- Elektrivoolu kulgemisel läbi mähiste. Kuna mähistel on teatud aktiivtakistus, siis eraldub neil soojusenergiat. Kuna mähised koosnevad põhiliselt vasest, siis nimetatakse neid kadusid ka vaseskadudeks
- Magnetsüdamikus ajas muutuva magnetvälja toimel hüstereesist ja pöörisvooludest. Seda kadu tuntakse masina teraseskaona (ka rauaskaona). Teraseskadu on seda suurem, mida suurem ja massiivsem on magnetahel ning mida laiem on magnetmaterjali hüstereesisilmus ja suurem ümbermagneetimise sagedus.
- Masinaosade ja õhu vahelisest hõõrdest, mis põhjustab ventilatsioonikao.
- Masina laagrite hõõrdest, mis põhjustab hõõrdekao.
Mootori kasutegurit η saab tõsta nende kadude vähendamisega. Et vähendada vaseskadusid, tuleb kasutada võimalikult väikse aktiivtakistusega juhtmeid. Teraseskao vähendamiseks kasutatakse magnetmaterjalina ferromagnetilist materjali, vahelduvmagnetväljade puhul kasutatakse pöörisvoolude vähendmiseks lehtterast. Kuna magnetahelasse kuulub ka õhupilu, siis üritatakse teha mootori õhupilu võimalikult väikeseks. Hõõrdekadusid saab vähendada kvaliteetsete laagrite ning määrde valikuga.
Elektrimootorite talitlusviisid
Töömasinad võivad olla erineva talitusega, milleks elektrimootorid kui täiturmehhanismid peavad olema õigesti valitud. Sõltuvalt oludest võib muutuda töömasina koormus, pöörlemiskiirus, pöörlemissuund. Ka nende muutustega peavad mootorid tagama õige töö.
Talitused võivad olla järgmised [21]:
- ühtlasel püsikiirusel pööreldes (continuous constant speed rotation); ventilaator, ketassaag, elektertransport,
- muutuva kiirusega pööreldes (variable speed rotation); pump (rõhu lang), kõvaketas
- muutuva kiiruse- ja pöörlemissuunaga (rotation with variable speed in both directions); tõstemehhanismid: kraanad, liftid, robotid.
- ühtlaselt sirgjooneliselt (linear movement with constant speed); konveier
- perioodiliselt edasi - tagasi (periodical movement); trükkimisseadmed
- mitteperioodiliselt edasi tagasi (non- periodical movement). elektriline roolimehhanism autodes, positsioneerimisseadmed.
Elektrimootori pöörlemist ilma koormuseta nimetatakse tühijooksuks. Sellisel juhul tekib mootoris madal pöördemoment ning elektrimasin tarbib vähem voolu. Paraku jääb tarbitava reaktiivenergia kogus samaks, mistõttu on mootori võimsustegur cos φ madal.
Igasuguse mehhanismi töötamisel vabaneb teatud hulk soojust, mis tõstab selle osade (näiteks täiturmehhanismide) temperatuuri. Üheks temperatuuritundlikumaks osaks on seadme kunstmaterjalist valmistatud isolatsioon, mis kuumenedes üle teatud piiri võib üles sulada. Seadmete isolatsiooniklassid on määratud standardiga EN 60034, mis määrab ära ka elektrimootorite talitlusviisid (vt. Tabel 2.1). Elektriajamid võivad töötada nii püsirežiimis, kui ka tsükliliselt. Tavaliselt on mootorile märgitud suhteline lülituskestus protsentides, mis on koormuse kestuse tk ja tsükli (perioodi) T suhe (kataloogis mootori võimsused standardsete lülituskestuste jaoks 15 %, 25 %, 40 %, 60 %) [23].
![]()
Sageli valitakse mootori võimsus kestevtalitluse jaoks (S1), kuid suur osa elektriajameid töötavad ka teistes talitlustes. Näiteks tõstemasinad kord tõstavad, kord langetavad, kuid vahepeal esineb nende töös seisakuid (nt koorma laadimisel). Samuti puurimisseadmed, mis koormatakse vaid puurimise ajaks, pausi ajal on mootor välja lülitatud. See tähendab, et mootori võimsus võib erinevate talitlusviiside korral olla erinev, mistõttu tuleb talitlusviis täpselt ära määrata ajami projekteerimisel. Võimsates rakendustes, nagu tõsteseadmed ja tööstusrobotid, muutuvad moment ja kiirus talitluskestuse jooksul märgatavalt. Samuti vajatakse kiirenduse ajal suuremat kävitusmomenti ning pidurdamise ajal pidurdusmomenti.
Tabel 2.1. Elektrimootorite erinevad talitlusviisid EN 60034 järgi [23].
Tüüp |
Nimetus |
Kirjeldus |
|---|---|---|
S1 |
Kestevtalitlus Continuous running |
Talitlusviis, kus masin töötab pidevalt nimikoormusel, mille kestus on küllaldane, et masina kõigi osade temperatuurid saavutaksid väljakujunenud väärtuse. |
S2 |
Lühiajaline talitlus Short-term |
Masina töötamise aeg nimikoormusel on nii lühike, et masina üksikute osade temperatuurid ei jõua välja kujuneda. Töötamisele järgneb paus, mille vältel masin jõuab jahtuda temperatuurini, mis on kuni 2 °C kõrgem väliskeskkonna tempertuurist. |
S3 |
Vaheajaline talitlus Intermittent periodic |
Koosneb perioodiliselt vahelduvastest nimikoormusvahemikest ja pausidest, kusjuures tsükli vältus ei ületa 10 minutit. Masin ei saavuta tsükli ühegi osa vältel püsitemperatuuri. |
S4 |
Vaheajaline talitlus olulise soojenemisega käivitusel Intermittent periodic with a high startup torque |
Koosneb perioodiliselt vahelduvatest käivitus -ja nimikoormusvahemikest ning pausidest. Käivituskadu on selles talitluses suhteliselt suur ja mõjutab oluliselt masina soojenemist. |
S5 |
Vaheajaline talitlus olulise soojenemisega käivitusel ja elektrilisel pidurdusel Intermittent periodic with a high startup torque and electric braking |
Koosneb perioodiliselt vahelduvatest käivitus-, nimikoormuse- ja pidurdusvahemikest ning pausidest. Käivitus- ja pidurduskaod on selles talitluses suhteliselt suured ja mõjutavad oluliselt masina soojenemist. |
S6 |
Koormusmuutlik talitlus Continuous-operation periodic |
Pidevalt toitevõrku lülitatud mootori nimikoormus-vahemikud vahelduvad tühijooksuvahemikega, kusjuures masina osade temperatuurid ei jõua koormuse ega tühijooksu ajal välja kujuneda. |
S7 |
Suunamuutlik talitlus Continuous-operation periodic with a high startup torque and electric braking |
Lühikesed nimikoormusvahemikud järgnevad üksteisele pöörlemissuuna vaheldumisega. Pidurdus- ja käivituskaod on selles talitluses suhteliselt suured ja mõjutavad oluliselt masina soojenemist. |
S8 |
Kiirusmuutlik talitlus Continuous-operation periodic with related load-speed changes |
Lühikesed nimikoormusvahemikud järgnevad pidevlt üksteisele nimikiiruse vaheldumisega mingi teise kiirusega. Üleminek ühelt kiiruselt teisele on seotud suhteliselt suurte kadudega, mis mõjutavad oluliselt masina soojenemist. |
Tabelist võib näha, et talitlusviisid S2, S3 ja S6 võimaldavad väiksemat mootori võimsust kui S1, sest nende koormamiste ajal ei saavuta mootori osad lubatud suurimat temperatuuri väärtust. Talitlusviisid S4, S5, S7 ja S8 aga suuremat mootori võimsust kui S1, sest töö ajal soojenevad nad rohkem kui kestevtalitluse puhul.
