
TÄITURID - ELEKTROMEHAANILISED TÄITURID
Servoajamid
Servoajami ehitus ja tööpõhimõte
Servoajam koosneb servomootorist ja servovõimendist (Joonis 2.43 ja Joonis 2.44). Servovõimendi (ka servokontrolleri või servomuunduri) peamine ülesanne on mootori toitevoolude reguleerimine. Sõna „servo” tuleneb ladinakeelsest sõnast „servus”, mis tähendab teenijat, orja või abimeest. Tööpinkides on servoajamid kasutusel peamiselt abiajamitena.
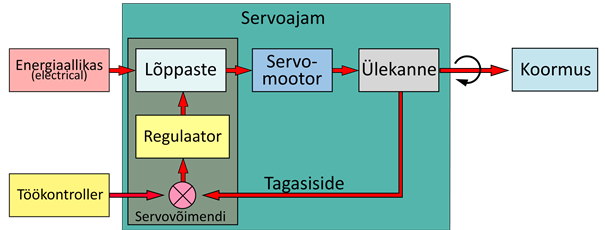
Joonis 2.43. Servoajami struktuurskeem

Joonis 2.44. Servovõimendid ja -mootorid
Servovõimendi ehk servomuundur reguleerib etteantud momendi ja kiiruse saavutamiseks mootori mähistesse antavat voolu. Servovõimendi koosneb põhiosadena lõppastmest ja regulaatorist.
Regulaator tüürib lõppastet ja tagab etteande- ja tegelike suuruste (vool, asend, kiirus) pideva võrdlemisega mootori täpse töö ka muutuva koormuse tingimustes.
Lõppaste kujutab endast jõuelektroonikal põhinevat modulaatorit, mis formeerib servomootori toitevoolud tagamaks täituri ettenähtud liikumistrajektoori.
Erinevalt tavalistest elektriajamitest, mis töötavad enamasti püsikiirusel, on servoajami talitlus reeglina ebaühtlane. Nimikiiruseni kiirendamine kestab tihti ainult mõne millisekundi, millele järgneb lühikese aja pärast sama kiire pidurdus; seejuures peab positsioneerimistäpsus olema sajandikmillimeetri suurusjärgus.
Servoajamitele esitatakse paljudel juhtudel alljärgnevalt loetletud nõudeid:
1) suur positsioonimistäpsus;
2) suur kiiruse reguleerimistäpsus;
3) suur reguleerimispiirkond;
4) momendi stabiilsus;
5) küllaldane ülekoormatavus;
6) suur toimekiirus.
Servoajami eelised ülejäänud reguleeritavate ajamite ees on head dünaamilised näitajad, suur täpsus ja nullkiirusmoment (suur moment nullilähedastel kiirusel) ning kompaktne ehitusviis suure erivõimsuse juures. Ajami dünaamiliste omaduste all mõistetakse tema toimekiirust, mille suurenemisel kasvab ka töömasinate kiirus, töötsüklite arv ja lõpptulemusena masinate tootlikkus.
Ajami nõutav täpsus on sageli määratud töömasinaga, mille käitamiseks ajamit kasutatakse. Moodne suure toimekiirusega ajam peab rahuldama erinevate töömasinate omadustega määratletud nõudeid.
Servoajamid on suure täpsuse ja toimekiirusega ning laias kiirusvahemikus töötavad ajamisüsteemid, mis täidavad oma funktsioone ka ajutiste ülekoormuste puhul.
Servoajamite mootorid
Servomootorid on elektrimootorid, mille konstrueerimisel on prioriteediks võetud dünaamika, st kiire käivitus ja pidurdus. Servomootoreid valmistatakse nii vahelduvvoolule (sünkroon- ja asünkroonmootorid) kui ka alalisvoolule (harjadega ja harjavabad).
Püsimagnetergutusega sünkroonmootor rahuldab tänapäeval kõige paremini servoajami mootoritele esitatavaid nõudeid. Suur erivõimsus saavutatakse püsimagnetite nagu neodüüm-raud-boor (NdFeB), samaarium-koobalt (SmCo) ja ferriitmaterjalide kasutamisega. Vähesemal määral esineb ka asünkroon-servomootoreid. Servomootoriga komplektis tarnitakse ka asendiandur, mis edastab regulaatorile asendi- ja kiiruseteavet (Joonis 2.45). Mootoriga ühisesse korpusesse võib olla integreeritud ka mehaaniline pidur, mis väldib võlli nihkumist väliste jõudude toimel toite puudumisel.
Püsimagnetergutusega sünkroonmootoriga on konstruktsioonilt sarnane, kuid juhtimisviisilt erinev harjavaba ehk elektronkommutaatoriga alalisvoolumootor.

Joonis 2.45. Tüüpilise servomootori välisvaade
Sünkroonmootorid
Sünkroonmootorid on mitmefaasilised mootorid, milles staatori ja rootori magnetväljad pöörlevad sünkroonselt. Pöörlev magnetväli tekitatakse staatorimähiste sobiva ruumilise paigutusega ning nende voolude ajalise järgnevusega. Magnetvälja pöörlemiskiirus nd arvutatakse valemiga
![]() ,
,
kus f on toitepinge sagedus ja p staatori pooluspaaride arv.
Sünkroonmootori, nagu ka asünkroonmootori staator koosneb kerest, lamineeritud magnetahelast ja staatorimähisest. Rootor koosneb võllist, lamineeritud magnetahelast ning selle külge kinnitatud püsimagnetitest. Dünaamiliste omaduste parandamiseks on mootori magnetahel perforeeritud. Sellega vähendatakse rootori inertsimomenti ning suurendatakse vastavalt mootori toimekiirust käivitamisel.
Kui sünkroonmootorit toidetakse pingega, mille sagedus on konstantne, siis on tema rootori pöörlemiskiirus võrdne magnetvälja pöörlemiskiirusega. Mootori koormamisel hilistub rootori pöördväli staatori pöördvälja suhtes ning rootori poolused on staatori pöördvälja pooluste suhtes teatud koormusnurga a all. Mida suurem on rootori hilistumine staatori suhtes, seda suurem on mootori poolt arendatav moment. Kui nurk on 90°, siis on rootori poolused kahe staatori pooluse vahel ning mootori poolt arendatav moment on maksimaalne. Rootori magnetvälja edasise hilistumise korral, st kui mootor on liigkoormatud, hakkab mootori moment uuesti vähenema ning mootor on mittestabiilses talitluses, st mootor võib vääratuda ja jääda seisma (Joonis 2.46).
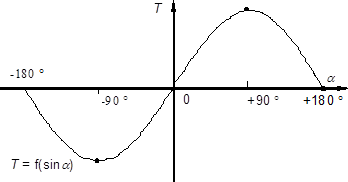
Joonis 2.46. Konstantse sagedusega toitepingega sünkroonmootori mehaaniline ehk momendi-nurga tunnusjoon
Servomootori kiiruse-momendi tunnusjoontel on näha kolm erinevat piirangut, mida ajami projekteerimisel tuleb arvestada (Joonis 2.47).
1. Mootori maksimaalne moment on peale muude suuruste piiratud ka püsimagnetite magnetvooga. Kui mootor on tugevasti koormatud ning staatori vool suureneb üle lubatud piiri, siis magnetid demagnetiseeruvad ning mootoris tekib momendikadu. Mootori ja toitemuunduri õige valiku korral pole vaja demagnetiseerumist karta.
2. Mootori moment on suurematel kiirustel piiratud mootori maksimaalse klemmipingega. Klemmipinge sõltub omakorda lõppastme pingest ja pingelangust kaablis. Pöörlemisel tekkiva vastuelektromotoorjõu (mootoris indutseeritud pinge) tõttu ei saa mootor suuremal kiirusel arendada suuremat momenti. Seepärast, kiiruse suurenemisel vastuelektromotoorjõud suureneb, mootori vool ja moment aga vähenevad.
3. Mootori moment on piiratud ka soojusliku koormusega. Ajami keskmine koormusmoment arvutatakse välja selle projekteerimisel. Arvutuslik moment peab olema väiksem kui masina poolt nullkiirusel arendatav moment T0. Lubatud soojusliku koormuse (temperatuuri) piirväärtuse ületamine põhjustab magnetahela demagnetiseerumist või mähiste isolatsioonirikkeid.
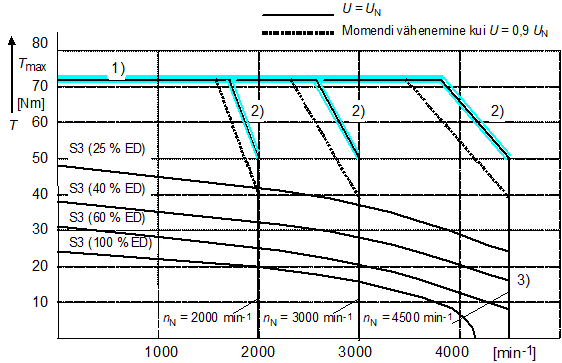 |
Joonis 2.47. Sünkroon-servomootori tüüpilised mehaanilised tunnusjooned [25]
Harjavabad alalisvoolumootorid
Harjavaba alalisvoolumootor sarnaneb konstruktsioonilt püsimagnetergutusega sünkroonmootorile. Staatorimähised on analoogsed mitmefaasilise vahelduvoolumasina omadega ja rootor koosneb ühest või mitmest püsimagnet-pooluspaarist. Erinevalt harjadega masinast ei hoita koormusnurka 90° juures mitte mehaanilise kommutaatori, vaid lõppastme pooljuhtlülitite täpse kommuteerimisega. Lõppastme lülitite õigeks kommuteerimiseks on vaja teada rootori asendit, mis määratakse kas Halli elemendi või optiliste andurite abil. Elektrooniline kommutaator on osaks servovõimendi lõppastmest. (Joonis 2.48)
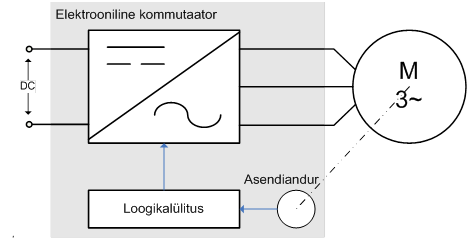
Joonis 2.48. Harjavaba alalisvoolumootor=püsimagnetergutusega sünkroonmootor + elektrooniline kommutaator [25]
Servoajamite juhtimine ja tagasiside
Servovõimendid
Servovõimendi (teised nimetused ka servokontroller või servomuundur) reguleerib etteantud liikumisparameetrite (moment, asend) väärtuste saavutamiseks mootori mähistesse antavat voolu.
Kompaktsete servovõimendite (Joonis 2.49) eeliseks on nende väikesed mõõtmed ja mass ning terviklik ehitus. Nende puhul pole vaja teha lisaühendusi üksikute komponentide vahel nagu moodulehitusega kontrollerite puhul.
Moodulehitusega numbrilistel servovõimenditel on üks toitemoodul ja mitu koordinaat-servomoodulit (Joonis 2.49). Nende eelised avalduvad mitmekoordinaadiliste servoajamite puhul. Sel juhul toidetakse mitut koordinaat-servomoodulit ühisest toitemoodulist. Toitemooduli võimsus määratakse üksikute koordinaat-servomoodulite summaarse võimsuse ja nende kasutusteguri järgi. Taolise moodulehitusega servoajami koosseisu võivad kuuluda ka pidurdus- ja energiatagastusahelad. Mitmekoordinaadilise servoajami eeliseks on ka see, et ühisel alalisvoolulülil paiknedes võib pidurdustalitluses toimiv koordinaatmoodul suunata vabanenud energia mootoritalitluses moodulisse, säästes sellega võrgust tarbitavat energiat.
Servoajam saab oma seadesuurused täituri talitlust vahetult juhtivast töö juhtimisprogrammist. Viimane võib olla laaditud ka servovõimendi sisemällu. Servoajami seadesuurused kujutavad endast täituri liikumise ajadiagrammi, st asendi, kiiruse ja mõnel juhul ka momendi muutumist ajas. Liikumistrajektoor allub mitmesugustele riistvaralistele piirangutele, mistõttu tuleb see enne ajamisse etteandmist n-ö konditsioneerida. Näiteks täituri asend ei tohi ületada teatud piirasendeid, samuti on konstruktsiooniliselt piiratud mootori maksimumkiirus ja -kiirendus (Joonis 2.50).
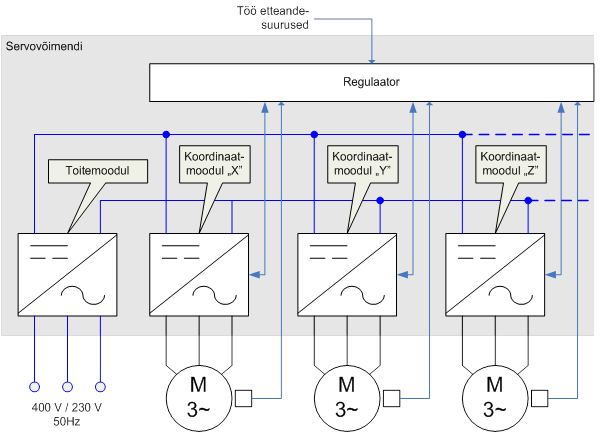
Joonis 2.49. Moodulitest koosnev kolmekoordinaadiline servovõimendi [25]
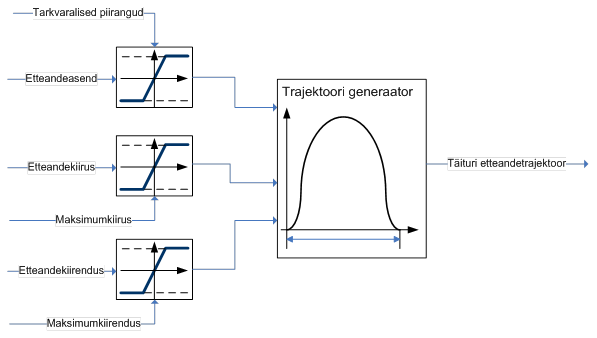
Joonis 2.50. Servo-täiturajami etteandetrajektoori genereerimine [25]
Tagasiside
Servomootorid komplekteeritakse standardselt resolveritega, mis määravad võlli absoluutasendi ühe pöörde ehk 360° ulatuses. Numbriliste servovõimenditega ühilduvad ka sincos-andurid (ühe- või mitmepöördelised absoluutväärtuse andurid) ja inkrementaalandurid ehk enkoodrid, mis tagavad eriti suure täpsuse ja dünaamika.
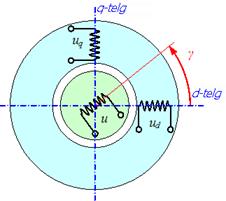
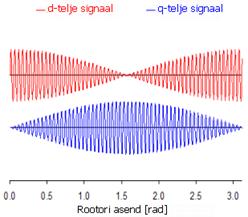
Resolver töötab pöördtrafo (Joonis 2.51), mille moodustavad rootoril ja staatoril paiknevad mähised, põhimõttel. Staatori kaks mähist on teineteise suhtes 90° võrra nihutatud ja nende siinuselisi väljundpingeid ud ja uq kasutatakse rootori kiiruse ning asendi juurdekasvusignaali määramiseks. Kontaktivabaks signaaliedastuseks on resolveri staatoril ja rootoril on ka lisamähised.
Ehitus |
Valemid |
Signaalid |
|
|
|
Joonis 2.51. Resolveri tööpõhimõte
Inkrementaalanduri nelja väljundkanali signaale Joonis 2.52) kasutatakse ajamite täpseks positsioneerimiseks. Väljunditeks on signaalid A ja B ning inverteeritud signaalid A ja B. Inkrementaalandur ehk enkooder väljastab kindla arvu impulsse ühe pöörde kohta, kusjuures signaalid A ja B on ajas 90° võrra nihutatud. Mootor pöörleb päripäeva, kui A kanali impulsside positiivsed frondid (esifrondid) edestavad B kanali impulsside esifronte ning vastupidi. Kuna inkrementaalandurid ei tuvasta mitte võlli absoluutasendit, vaid selle juurdekasvu, siis absoluutasendi määramiseks on vaja esmalt määratleda baaspunkt, millest algab liikumise arvutamine. Baaspunktiks võib olla ka eraldi koodirajal paiknev indeks.
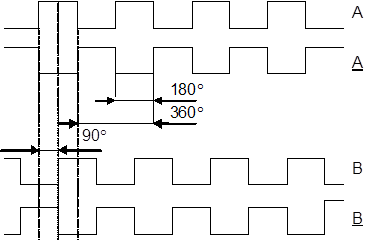 |
Joonis 2.52. Inkrementaalanduri signaalid [25]
Inkrementaalandur koosneb valgusallikast ja läbipaistmatust koodikettast, millesse on perforeeritud koodirada. Fototajur püüab kinni läbi perforatsiooni tunginud valguse ja väljastab siinuseliselt muutuva signaali, mis muundatakse nelinurkimpulsside jadaks (Joonis 2.53) kiirus on määratud enkoodri väljundimpulsside sagedusega (Joonis 2.54).
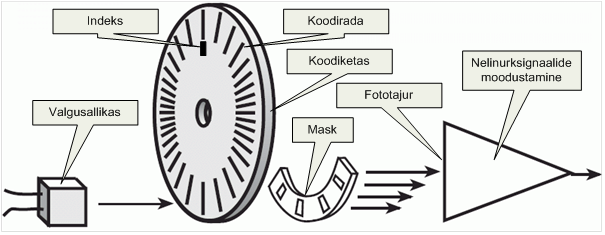
Joonis 2.53. Inkrementaalanduri (enkoodri) ehitus [25]
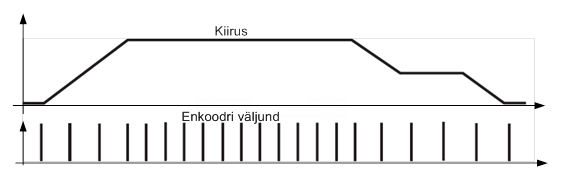
Joonis 2.54. Kiiruse ja enkoodri väljundsignaali vaheline seos [25]
Servoajamite rakendamise näited
Positsioneerimine on servoajami klassikaline ülesanne. Sekundi murdosa jooksul peab ajam saavutama nimikiiruse ja lühikese aja möödudes sama kiiresti pidurdama, et jõuda sajandikmillimeetri täpsusega etteantud positsioonile.
Kiiruse reguleerimisega tagatakse ajami ühtlane töö. Kiirendus ja pidurdus antakse ette vastavate kõverate ehk rampidega. Juhtarvuti alamprogrammid võimaldavad kasutada tootmisprotsessi käigus mitut kiirusekõverat vastavalt protsessi etapile.
Spindli positsioneerimiseks tuleb mootor hetkeks peatada ja viia telg tööriista või tooriku vahetamiseks ettenähtud asendisse.
Telgede sünkroniseerimine on vajalik rakendustes, kus ühe koordinaadi liikumine sõltub teisest.
Elektrooniline ekstsentrik leiab kasutust muutuva ülekandeteguriga mehhanismides, asendades varem kasutatud mehaanilist lahendust peavõllil paikneva ekstsentriku ja järgiva teljega.
Lendsaag on funktsioon, mida kasutatakse liikuva materjali (nt konveieril) töötlemisel: lõikamisel, trükkimisel, keevitamisel jne. Töötlemise käigus peab järgiv telg toorikuga kaasa liikuma ja peale töötlust naasma lähteasendisse.
Momendi juhtimine toimub läbi täpse ja dünaamilise voolu reguleerimise. Servoajam on suuteline arendama maksimaalset momenti ka väikestel kiirustel, mistõttu kasutatakse teda mähkimismasinates ja presside käitamisel.
