
End-effector (gripper, tool, etc) gives a functionality to the industrial robot. Depending of the industrial task the robot is fulfilling is the construction and functionality of an end effector. Some nomenclature of end-effectors is given in the Figure 4.1.
In robotics, an end effector is the device at the end of a robotic arm, designed to interact with the environment. The exact nature of this device depends on the application of the robot. In the strict definition, which originates from serial robotic manipulators, the end effector means the last link of the robot. Wikipedia

Figure 4.1 Industrial robot and different types of end-effectors.
The most essential robot periferial is the end effector, or end-of-arm-tooling (EOT). There are very different application for EOT. Most common are end effectors including welding devices (MIG, TIG welding, spot welding), spry guns also grinding and deburring devices (pneumatic disk or belt grinders); grippers (devices that can grip an object, usually electromechanical or pneumatic); picking objects by vacuum; EOT devices for machining, etc. EOT are frequently highly complex. They can carry out different activities at the same time and may utilize various sensors. End-effector systems are rapidly in developing.
The basic construction of joining the end-effector with the robot arm gives the degree of freedom to the end effector and also the functionality for doing a certain industrial task (see Fig 4.2). Wrist configuration main elements are:
-
-
- Wrist assembly is attached to end-of-arm
- End effector is attached to wrist assembly
- Function of wrist assembly is to orient end effector
- Body-and-arm determines global position of end effector
- Two or three degrees of freedom:
- Roll
- Pitch
- Yaw
-
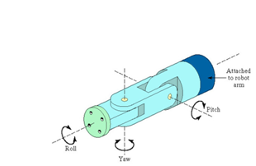
Figure 4.2. End-of-arm tooling
End effector main types are:
- Dual grippers- mechanical gripper with two gripping devices in one end-effector for machine loading and unloading for reducing cycle times
- Interchangable fingers- mechanical gripper whereby, to accommodate different workpiece sizes, different fingers may be attached
- Sensory feedback fingers- mechanical gripper with sensory feedback capabilities in the fingers to aid locating the workpiece, and to determine correct grip force to apply
- Multiple fingered grippers- mechanical gripper with the general anatomy of the human hand
- Standard grippers- mechanical grippers that are commercially avaiable, thus reducing the need to custom-design a gripper to each separate robot application
- End effectors are used also as tools for certain manufacturing operations. This is called end-of-tooling (EOT). Tools are used to perform processing operations on the workpiece. Spot-welding, arc welding, spray painting are very widely used. Tool is held by the robotic manipulator for drilling, routing, grinding, milling, etc. Then the NC programming principles must be used.

Figure 4.3 Vacuum gripper
Grippers can grasp work pieces, centre and orientated them. It should include sensors to indicate, if a part is present or not. On the whole a gripper should be as lightweight as possible, for the maximum payload of a machine includes the weight of a work piece. Housing and fork should be held as close to the axis of grip as possible, so as to avoid high moments on the gripper.
There are different selection criteria for decision making. In the following some of them are described. In regards to Arc welding the Aristo RT2 Torch was chosen, This tool will be attached to the Arc welding robot (ABB IRB 4600 ), it was selected because it is very suitable for arc welding due to its mechanised solution with and air-cooled mechanism, optimized gas flow provides stable and reliable welding arc and also because it is suitable for all kinds of robot’s types and model. Also its robust brass torch flange and optimized gas flow provides stable and reliable welding arc.
End of arm tooling for welding is presented on the Figure 4.4.
 |
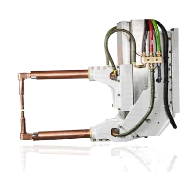 |
| Figure 4.4 Arc welding gun Aristo RT2 Torch | ABB FlexGun for Spot Welding |
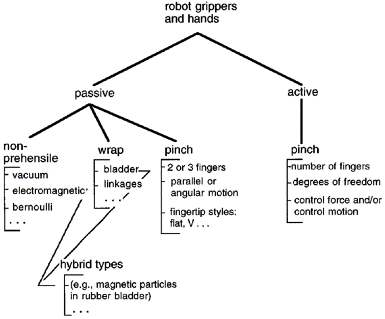
Figure 4.5. A taxonomy of end-effectors

Figure 4.6 Table of Gripping methods along with the non-penetrating and the penetrating examples
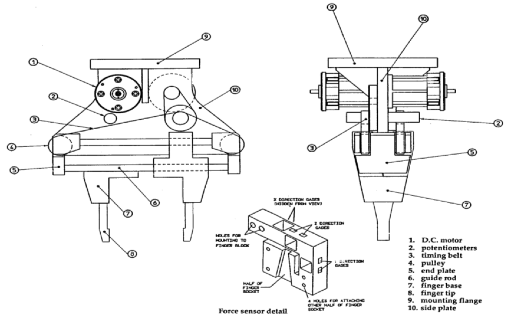
Figure 4.7. A two-finger servo gripper with force sensing and changeable fingertips.
References
[23] M. R. Cutkosky, “Robotic Grasping and Fine Manipulation,” Kluwer Academic
Publishers, 1985.
[24] M. Mason, and K. Salisbury, “Robot Hands and Mechanics of Manipulation,”MIT Press,
1986.
[25] R. Murray, Z. Li, and S. Sastry, “A mathematical introduction torobotic manipulation,”
CRC Press, 1999.
[26] Robot Grippers by Gareth J. Monkman, Stefan hesse, Ralf Strinmann, Henrick Schunk.
Edited, designed and published by Wiley-vch, pp 24.
[27] Robot Grippers by Gareth J. Monkman, Stefan hesse, Ralf Strinmann, Henrick Schunk.
Edited, designed and published by Wiley-vch, pp 19.
QUESTIONS Q6/ TASKS T6
- What do you mean under gripper and end-of arm tooling
- What are the end-effector selection main principles
- How to select a gripper for machine tending operations (give an example)
- How to select a gripper for bending operation (give an example)
- Describe the main construction elements of a gripper
- For what type of EoAT the given elements are used

- For what type of EoAT the given elements are used

- What type of gripping methods are used
- For what purposes magnetic grippers are used. Give an example
- Describe a gripper selection pricedure